
橋式起重機械工況分析
橋式起重吊車(又稱行車)是工況企業(yè)中十分常用的一種起重機械,主要結構分為:橋架、大車行走機構、小車行走機構及起升機構。其中,大車及小車機構帶動吊車前后左右行走,起升機構拖動重物負載上下運動。
吊車的大車、小車及起升機構在運動過程中,其阻轉矩基本不變,可看作為恒轉矩負載。重物上升時,電動機克服重力做功,屬于阻力負載;重物下降時,當重力大于傳動機構的摩擦阻力時,重物的位能成為下降的動力,電動機處于再生制動狀態(tài),此時重物屬于動力負載。
·原型拖動方案
吊車各部分的拖動系統(tǒng),一般都需要調速。在變頻技術成熟之前,繞線式異步電機轉子回路串接電阻調速是起重機械中最常見的調速方法。
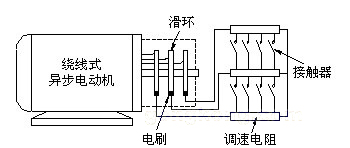
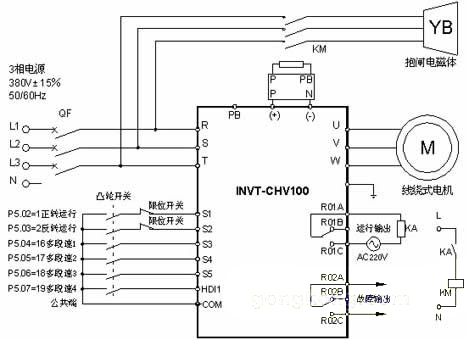
繞線式電機主電路如左圖所示:通過滑環(huán)和電刷在轉子回路內串入若干段電阻,由接觸器" title="接觸器">接觸器來控制接入電阻的多少,從而控制轉速。該方案存在下述問題:
1.設備故障率高
因工礦企業(yè)工作環(huán)境差,風塵、腐蝕性氣體等極易對電機滑環(huán)、碳刷及接觸器造成不良影響,加之電機啟動頻繁,電流及機械沖擊大,因此月平均故障率可高達數(shù)次;
2.控制線路復雜
電機調速級數(shù)越多,需要接入的接觸器就越多,這使得控制線路十分復雜,故障查除困難;
3.熱功率損耗大
轉子回路串入電阻后,電機損耗功率以熱能形式釋放,能量不能回收,電阻需定時更換。
4. 能耗分析
線繞式異步電動機的轉子回路串入電阻后,其機械特性如下圖所示。
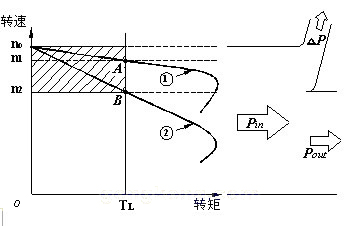
因轉差變大,機械特性變“軟”,在負載轉矩TL不變的情況下,拖動系統(tǒng)的工作點由A點移到B點,轉速由n1降為n2。其定子電磁輸入功率分配情況如下:
1.電磁輸入功率為:
Pin = TL•n0
2. 電機輸出功率為(曲線②):
Pout = TL•n2
3. 電機損失功率為(曲線②):
△P = TL•( n0- n2 )
如上圖所示,①、②號曲線分別為線繞式電機轉子回路串入電阻前、后的機械特性曲線。圖中陰影部分表明電機在串入調速電阻后,其功率損失增大許多,且機械特性偏“軟”,電機驅動能力明顯下降。
·提升機變頻調速" title="變頻調速">變頻調速方案
近年來,隨著變頻技術的日益成熟,以及變頻器價格的不斷降低,變頻調速技術得到了越來越廣泛的應用,加之國家對節(jié)電節(jié)能技術的積極推廣,起重機械的變頻改造已成為趨勢。
深圳市英威騰" title="英威騰">英威騰電氣有限公司作為國內主要變頻器專業(yè)制造商,始終致力于變頻器的市場推廣與行業(yè)應用。2004年推出的CHV系列高性能" title="高性能">高性能矢量變頻器,已廣泛應用于注塑機械、提升機械、拉絲機械、紡織機械、數(shù)控機床等要求較高的場合。下文將以CHV矢量變頻器為核心,詳細闡述提升機械變頻調速方案。
·工藝要求及變頻控制要點
1.調速范圍
大型吊車多采用有級調速,速度檔位選擇常采用凸輪控制器,調速比一般小于10;CHV高性能矢量變頻器具有16段速設定功能,在閉環(huán)矢量控制" title="矢量控制">矢量控制模式下,其調速范圍高達1:1000,可輕松滿足需求;
2.制動定位
大車、小車及起升機構都要求有定位功能,較重負載制動定位時,拖動電機常處于再生制動狀態(tài);變頻調速時,需加裝制動電阻,采用電制動與機械制動相結合的制動方式,以確保準確停車;
3.吊鉤啟動
吊鉤從地面拖動重物啟動時,為避免機械沖擊,啟動檔的速度不能過快;CHV變頻器具有豐富的加減速預設曲線,吊鉤啟動可選擇“S”型加速曲線,保證加速過程平穩(wěn)順暢;
4.溜鉤處理
吊鉤拖動重物起停時,電動機與抱閘裝置配合不當,容易造成重物滑落,即所謂“溜鉤”問題; CHV變頻器在閉環(huán)矢量控制模式下,0Hz運行時最大可輸出180%的額定轉矩,能很好解決吊車溜鉤問題。
·節(jié)能分析
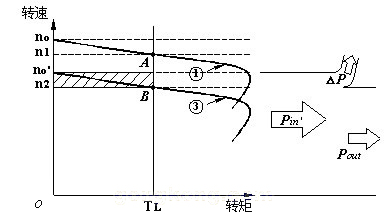
右圖為異步電動機主回路串接變頻器后的機械特性圖。
圖中曲線①為電機調速前的機械特性,曲線③為電機變頻調速后的機械特性。對比可知,變頻器調速的一個顯著優(yōu)點就是在調速的同時能夠調整供電電壓,使電機的機械硬性基本保持不變。相比繞線式異步電機的轉差調速,在負載轉矩TL不變的情況下,變頻調速具有較好的節(jié)能效果。其電磁輸入功率分配情況如下:
1.電磁輸入功率為:
Pin' = TL•n0'
2.電機輸出功率為(曲線③):
Pout = TL•n2
3.電機損失功率為(曲線③):
△P = TL•( n0' - n2 )
·變頻器電控方案
深圳市英威騰電氣有限公司成功改造的橋式抓斗吊車電機參數(shù)及需選配變頻器清單如下:

電控方案說明:
1、提升電機的變頻器需選配PG卡,采用有PG矢量控制;其余變頻器均采用無PG矢量控制;
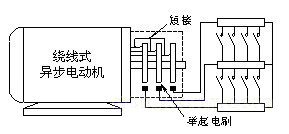
2、原繞線式電機可不必更換,但需把電機轉子上的電刷舉起,且轉子的出線頭要短接,如左圖所示:
3、所有變頻器均需選配制動電阻或制動單元(15KW以上變頻器制動單元外置);
4、因應用現(xiàn)場吊車是在粉塵較大的水泥生產車間使用,因此所有變頻器均需選配專用防粉防塵外殼;
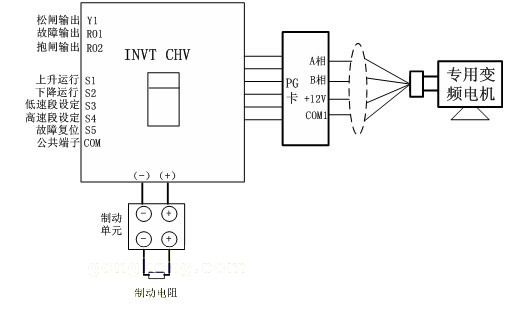
以提升電機為例,其主電路示意圖如下:
用變頻器運行信號控制電磁抱閘;變頻器在有PG矢量控制模式下,0Hz運行時可輸出180%額定轉矩,轉矩響應時間在20ms以內,完全可滿足吊車的應用要求,有效避免溜鉤問題及起停抖動問題;
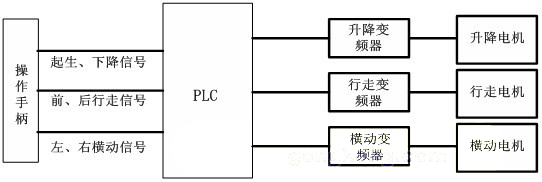
當然,對于一些高檔提升機械,還會應用到PLC來進行對提升機構、行走機構、橫動機構進行集中控制,實現(xiàn)多種功能,控制簡易示圖如下:
變頻器的外圍接線配置圖如下:
·總結
深圳市英威騰電氣有限公司自主研發(fā)生產的CHV系列高性能矢量型變頻器成功應用于橋式吊車領域,有效滿足吊車的控制工藝要求,并得到客戶的一致認同。英威騰公司提出的吊車變頻控制方案,推動了吊車電氣控制技術的發(fā)展,完全滿足吊車的軟啟動、軟停車、無沖擊、平滑調速功能,有效降低系統(tǒng)的能耗及機械的維護成本,延長機械的使用壽命。