
摘 要: 用浮點DSP實現(xiàn)磁浮列車數(shù)字控制器克服了傳統(tǒng)模擬控制器和數(shù)字控制器的缺點和局限性。達到了理想的控制效果。
關(guān)鍵詞: 磁浮列車 電磁懸浮控制 電磁鐵 控制系統(tǒng) 數(shù)字信號處理器
由于磁浮列車是脫離軌道運行的,所以控制技術(shù)與磁浮技術(shù)無疑是磁浮列車的關(guān)鍵所在。對磁浮列車控制的一個最基本要求,是要保證磁浮列車能夠在各種擾動(外部和內(nèi)部)作用下仍然具有平衡穩(wěn)定的懸浮。從磁浮列車的控制手段來看,可以應(yīng)用模擬電子電路,亦可以應(yīng)用數(shù)字電子計算機。模擬控制具有運算速度快、實時性好等優(yōu)點,但由于其存在工作穩(wěn)定性差、精度低、調(diào)整困難以及難于實現(xiàn)復(fù)雜的控制規(guī)律等許多缺點,所以采用高速、高性能的數(shù)字控制成為目前的主要控制方式。
1 磁浮列車懸浮控制系統(tǒng)
磁浮列車實際上是一個受電磁鐵和導(dǎo)軌間作用力控制的空間自由體,在空間具有6個自由度。磁浮列車的控制可以分為懸浮控制、導(dǎo)向控制和驅(qū)動控制三個方面。對于電磁吸浮式磁浮列車,由于電磁吸力和懸浮氣隙之間成非線性反比關(guān)系,使得該電磁懸浮系統(tǒng)本身存在固有的不穩(wěn)定性,因而懸浮控制成為該類型磁浮列車的控制關(guān)鍵。從控制理論上講,有線性控制理論和非線性控制理論。應(yīng)用不同的控制理論對磁浮列車懸浮控制系統(tǒng)進行分析和綜合都應(yīng)該得到類似的結(jié)果,但不同方法所帶來的有效性、直觀性和簡便性卻不盡相同,尤其在實現(xiàn)方式上。
在實現(xiàn)手段上,對于復(fù)雜的控制理論來說,用數(shù)字實現(xiàn)方式肯定比模擬實現(xiàn)方式方便。而磁浮列車懸浮控制系統(tǒng)本身就是個復(fù)雜系統(tǒng),這自然就對數(shù)字控制器提出了較高的要求。磁浮列車模擬控制器電路中的電阻、電容、運算放大器等器件的特性都會隨著溫度的改變而改變,這就意味著,一個模擬控制器的性能在0℃時和70℃時會大不一樣,而數(shù)字控制器的電路在其保證的工作范圍內(nèi)受溫度變化的影響幾乎沒有。此外,對于磁浮列車模擬控制器電路來說,還必須考慮到器件以及制造器件的材料的壽命,這將極大地影響整個懸浮控制系統(tǒng)的性能,但對于用數(shù)字信號處理器(DSP)來實現(xiàn)數(shù)字控制器,它們所帶來的影響要小得多。而且,DSP電路還可以通過編程來檢測和補償模擬系統(tǒng)的變化。
2 數(shù)字信號處理器簡介
隨著應(yīng)用的日益廣泛,DSP(Digital signal processor)已經(jīng)成為許多高級設(shè)計不可缺少的組成部分。高速數(shù)據(jù)傳輸能力是DSP用作高速實時處理的關(guān)鍵性能之一。
本系統(tǒng)采用的是得克薩斯儀器公司(TI)的第三代數(shù)字信號處理器TMS320C3X系列的C31芯片。它是32位浮點運算DSP,其內(nèi)部總線結(jié)構(gòu)和特殊的數(shù)字信號處理指令集保證了它的速度很高,靈活性也很好,每秒可以執(zhí)行3300萬次浮點運算。它可以在60ns的單指令周期內(nèi)并行完成定點或浮點的乘法和ALU運算。該處理器設(shè)置了一個通用寄存器堆、高速程序緩存器(Cache)、專用輔助寄存器算術(shù)單元(ARAU)、片內(nèi)雙口存儲器、一個支持并行I/O的DMA通道等。其高度的并行性、高精度及通用性使得該系統(tǒng)既有很好的性能,又便于使用。
傳統(tǒng)的數(shù)字控制器大多采用較高檔的單片機來實現(xiàn),這種數(shù)字控制器的主要缺點是它的控制效果受到采樣頻率的限制。當控制器算法比較復(fù)雜、運算量較大時,采樣頻率就不可能很高。由于磁浮列車高速運行時, 需要傳感器在采樣數(shù)據(jù)時有很好的實時性,而傳統(tǒng)的數(shù)字控制器在進行浮點處理時,速度很慢,勢必影響控制效果。但用DSP來實現(xiàn),這一問題就不難解決。
3 基于DSP的懸浮控制器的設(shè)計
在這里作者僅就用DSP實現(xiàn)單磁鐵懸浮控制器的情況進行分析。對整車進行分散控制時,單磁鐵懸浮系統(tǒng)的分析和綜合是磁浮列車系統(tǒng)分析和控制的基礎(chǔ)。
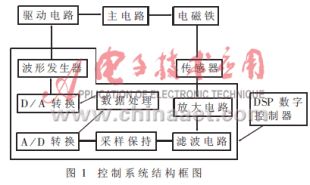
電磁鐵的可控量為其線圈的端電壓(或者電流),通過改變線圈電流,改變氣隙磁密, 可改變電磁吸力的大小。在開環(huán)情況下,系統(tǒng)是不穩(wěn)定的,只有對電磁鐵的氣隙進行反饋控制,才能保持氣隙恒定。控制框圖如圖1所示。控制原理為:首先通過傳感器實時檢測電磁鐵的氣隙變化狀態(tài),并與存儲在EPROM內(nèi)的參考值進行比較;然后通過控制器進行運算處理,得到綜合控制量,此信號即是調(diào)節(jié)電磁鐵狀態(tài)的控制信號,調(diào)節(jié)電磁鐵電流,可以保證電磁鐵始終處于一個動態(tài)的穩(wěn)定狀態(tài)。
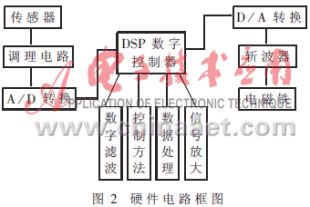
由于有了DSP高速數(shù)據(jù)處理能力的保障,外部的A/D和D/A芯片可選用轉(zhuǎn)換速度較快的AD1674和MAX7547,其精度均為12位。在一般的數(shù)字控制器中,圖1的采樣保持和濾波電路要用獨立的電路來實現(xiàn),這勢必增加了電路的復(fù)雜性,同時也增加了不必要的外界干擾;而用DSP來作控制器,使這些部分可不必用獨立的電路實現(xiàn),只要通過軟件編程就可以實現(xiàn),這樣既方便操作,又使調(diào)試容易,不必破壞原來的硬件電路。整個硬件電路設(shè)計的框圖如圖2所示。
為了節(jié)省CPU的時間,A/D轉(zhuǎn)換采用中斷查詢的方式。TMS320C31的中斷包括四個外部中斷、串行口中斷、定時器中斷和DMA中斷等。其中四個外部中斷采用電平觸發(fā)中斷方式,而不支持下降沿觸發(fā)中斷方式。在實際DSP應(yīng)用中往往需要下降沿觸發(fā)中斷,如外部提供一個2.4kb/s的定時時鐘, 要求每個下降沿觸發(fā)一次中斷。在這種情況下需要將下降沿轉(zhuǎn)化為一個低電平窄脈沖,并且保證這個窄脈沖能夠觸發(fā)并且只觸發(fā)一次外部中斷。
TMS320C31在H1時鐘的下降沿檢測中斷引腳, 且每兩個H1時鐘周期便從同一個中斷源接受一次中斷。為使DSP芯片只識別一次中斷,低電平窄脈沖的寬度必須至少包含1個H1的下降沿,至多包含2個H1的下將沿, 也就是說窄脈沖的寬度τ必須滿足:
P<τ<2P, P等于H1的周期
中斷轉(zhuǎn)換電路可用單穩(wěn)電路來實現(xiàn),圖3即是采用74AS221觸發(fā)器實現(xiàn)的轉(zhuǎn)換電路,用AD1674的轉(zhuǎn)換狀態(tài)引腳STA來觸發(fā)中斷/INT1。圖中R4、C15共同決定窄脈沖的寬度,由于τ=RC,因此當時鐘是40MHz時,H1的周期為50ns,RC的值應(yīng)在50ns和100ns之間,取R4=1.8kΩ,C15=47pF,RC=84.6ns。
同時考慮到AD1674各選通信號均是用CPU的地址線選通,而它的啟動轉(zhuǎn)換引腳R/C的低電平保持時間至少為100ns, 在這里我們用TMS320C31的外部存儲選通信號引腳/STRB經(jīng)單穩(wěn)電路轉(zhuǎn)換得到。如圖3所示,將/STRB的下降沿經(jīng)74AS221作用可得到τ=112.2ns的低電平時間。
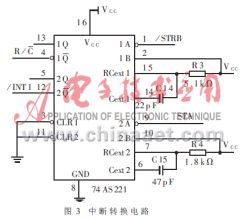
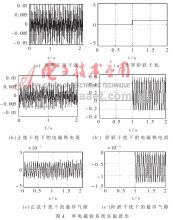
圖4所示的實驗波形是利用本論文設(shè)計的DSP數(shù)字控制器,運用運算量較大的最優(yōu)控制的方法對單電磁鐵系統(tǒng)進行實驗所得出的結(jié)果。以上波形均是相應(yīng)物理量在相應(yīng)外界干擾下的變化值。圖中單位均為國際單位制,時間t的單位是秒,干擾信號是外力,單位是牛頓,電流單位是安培,氣隙單位是米。在這里氣隙穩(wěn)定是我們的控制目標,加速度是衡量乘客舒適度的指標,所以我們對氣隙和加速度兩方面進行最優(yōu)化設(shè)計。通過最優(yōu)控制方法設(shè)計出來的反饋系數(shù)為Ks(氣隙反饋系數(shù))=-2239.4,Ka(加速度反饋系數(shù))=-1。有關(guān)實驗參數(shù)如下:
電磁鐵質(zhì)量:m=120kg(單個電磁鐵質(zhì)量)
電磁鐵匝數(shù):N=356
電磁鐵截面積:A=210cm2(單個)
線圈電阻:R=1Ω
平衡氣隙:s0=10mm
平衡電流:i0=30A
4 結(jié)果分析
從以上波形可以看出,無論是在外界正弦干擾還是在外界階躍干擾下,穩(wěn)定懸浮時,電磁鐵電流有較小的紋波, 穩(wěn)態(tài)氣隙值也只有很小程度的波動。而這就是DSP控制器在這方面的優(yōu)越性。這是由于用DSP實現(xiàn)時,控制頻率比一般數(shù)字控制器大大提高,同時DSP的高速浮點乘法和加法運算使從傳感器來的信號能夠得到很好的實時處理,也就是說上一時刻從傳感器來的信號經(jīng)A/D轉(zhuǎn)換,再到控制器處理完以后得出來的反饋控制量作用給對象電磁鐵時,電磁鐵的狀態(tài)變化不大,因為這期間消耗在控制運算方面的時間很少,做到了很好地跟蹤對象變化,系統(tǒng)的性能得到了明顯提高。
同時在實現(xiàn)過程中我們也明顯感覺到用DSP實現(xiàn)的數(shù)字控制器有以下幾個優(yōu)點:①容易實現(xiàn)較復(fù)雜的、運算量較大的控制算法,控制器參數(shù)也可很容易地修改;②控制脈沖頻率大大提高,系統(tǒng)性能得到很好的改善;③很容易實現(xiàn)信號處理和濾波電路,減少外圍電路。
磁浮列車的控制是一項高難度、高復(fù)雜性的尖端科學(xué)技術(shù),有許多理論和實際問題需要進行研究和試驗。本文所敘述的僅僅是個起步和摸索,DSP技術(shù)是一項新興技術(shù),隨著它的推廣和應(yīng)用,它的作用一定會得到進一步加強,必將帶來一系列的創(chuàng)新和成果。
將DSP應(yīng)用到磁浮列車控制器中來,為更好地控制磁浮列車打下基礎(chǔ)。這樣就可以探索新的控制方法,如神經(jīng)網(wǎng)絡(luò)控制、模糊控制、自適應(yīng)控制、H∞控制等在磁浮列車控制系統(tǒng)中的應(yīng)用。DSP 的高速和高效的浮點數(shù)據(jù)處理能力以及它的哈佛流水線結(jié)構(gòu)就為應(yīng)用這些控制方法提供了條件。
同時外圍電路可用FPGA來實現(xiàn),如存儲器、譯碼電路等部分。當然如果條件允許的話,可將整個控制器用FPGA(用它的DSP模塊)來實現(xiàn),最后僅用一塊芯片和一些外圍模擬器件即可實現(xiàn)這一數(shù)字控制器,這樣會大大減少外圍干擾,系統(tǒng)反應(yīng)時間和脈沖頻率都可得到很大程度的提高。
參考文獻
1 吳建軍.磁懸浮系統(tǒng)的研究.西南交通大學(xué)本科生畢業(yè)設(shè)計,1998
2 江 浩,連級三.單磁鐵懸浮系統(tǒng)的動態(tài)模型與控制. 西南交通大學(xué)學(xué)報,1992(1)
3 TMS320C3X User's Guide. Texas Instruments,1992
4 張雄偉.DSP芯片的原理與開發(fā)應(yīng)用.北京:電子工業(yè)出版社, 1997
5 彭啟琮,李玉柏. DSP技術(shù). 電子科技大學(xué)出版社,1997(11)