一、概述
立式擺盒機(jī)是近幾年出現(xiàn)在國內(nèi)市場上的,自從該機(jī)械把傳送主軸改成用伺服電機(jī)后,大大減少了機(jī)械在傳送過程中出現(xiàn)的位置偏差的,能夠準(zhǔn)確的把產(chǎn)品傳送到指定的位置。同時(shí)還具有人工離機(jī)操作,確保安全、改善勞動(dòng)條件等優(yōu)點(diǎn)。
二、工藝簡介
擺盒機(jī)由上位機(jī)系統(tǒng)、伺服系統(tǒng)、擺盒機(jī)主機(jī)三部分組成。其工作原理:通過上位機(jī)系統(tǒng)發(fā)送指令脈沖到伺服驅(qū)動(dòng)器,伺服驅(qū)動(dòng)器根據(jù)指令脈沖控制電機(jī)運(yùn)轉(zhuǎn),把盒子運(yùn)送到指定位置。工作基本過程:由吸盤從進(jìn)料口吸取一個(gè)盒子,放到X軸主線上,由伺服電機(jī)帶動(dòng)X軸運(yùn)到另一端,在由Y軸伺服電機(jī)帶動(dòng)Y軸主線把盒子運(yùn)到指定位置。
三、設(shè)備組成
擺盒機(jī)由上位機(jī)系統(tǒng)、伺服驅(qū)動(dòng)器、伺服電機(jī),擺盒機(jī)主機(jī)等組成。A、上位機(jī)系統(tǒng)主要完成運(yùn)動(dòng)軌跡的設(shè)計(jì),并把運(yùn)動(dòng)軌跡以脈沖的形式發(fā)送給驅(qū)動(dòng)器。B、伺服系統(tǒng):主要把上位機(jī)系統(tǒng)發(fā)送過來的脈沖轉(zhuǎn)化成驅(qū)動(dòng)器電機(jī)的帶有功率的信號(hào)(脈沖串),C、擺盒機(jī)主機(jī):由吸盤從進(jìn)料口吸取一個(gè)盒子,放到X軸主線上,由伺服電機(jī)帶動(dòng)X軸運(yùn)到另一端,在由Y軸電機(jī)帶動(dòng)Y軸主線把盒子運(yùn)到指定位置。
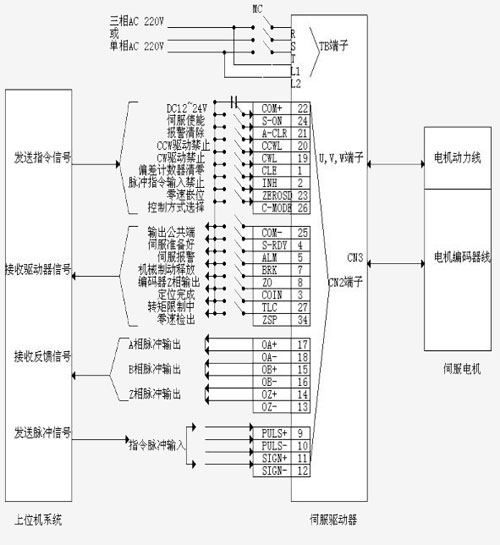
四、控制線(CN2)接線圖與伺服參數(shù)設(shè)置
1)、控制線(CN2)接線圖:
2)參數(shù)設(shè)置說明:
P4=0(控制方式選擇,0:位置控制);
P9=3(電機(jī)型號(hào)選擇,不同電機(jī)此參數(shù)不同,3:代表60電機(jī)(200W);
P11=3000(位置環(huán)增益,范圍500-8000);
P14=800(速度環(huán)增益,范圍500-8000);
P15=2000(速度環(huán)積分時(shí)間常數(shù),范圍500—8000);
P38=1250(電流環(huán)增益,范圍500—8000);
P27=1(脈沖輸入邏輯取反,用于改變電機(jī)方向,范圍0/1);
P64=64( 使能信號(hào)選擇:0:使能信號(hào)由系統(tǒng)給定
64:使能信號(hào)由驅(qū)動(dòng)器給定);
P81=10/15(電機(jī)瞬間過載倍數(shù),范圍0~300);
P82=50(電機(jī)瞬間過載時(shí)間,范圍0~5000);
五、調(diào)試與注意事項(xiàng)
1)、調(diào)試步驟:
A、正確接好電機(jī)動(dòng)力線(U,V,W),編碼器線(CN3),電源線(L1,L2,R,S,T),接好控制線(CN2);
B、低速運(yùn)行一下電機(jī),看電機(jī)方向是否正確(可通過調(diào)節(jié)PA26,PA27參數(shù)來改變電機(jī)方向);
C、根據(jù)要求設(shè)置好伺服驅(qū)動(dòng)器的電子齒輪比(PA31/PA32);
D、完成上述步驟后,在運(yùn)行一下電機(jī),看電機(jī)聲音是否正常,電機(jī)剛性是否滿足,以及響應(yīng)時(shí)間;(可通過調(diào)節(jié):位置環(huán)參數(shù)PA11,PA12,PA13;速度環(huán)參數(shù)PA14,PA15;電流環(huán)參數(shù)PA38,PA41)。
E、調(diào)節(jié)后,運(yùn)行一下,看運(yùn)行是否滿足客戶要求,如不滿足,重復(fù)D步驟,直到滿足客戶要求。
2)、注意事項(xiàng):
A、接動(dòng)力線(U,V,W)時(shí),一定要一一對(duì)應(yīng)接到U,V,W端子上。不能通過改變U,V,W相序來改變電機(jī)方向,可通過調(diào)節(jié)參數(shù)來該變電機(jī)方向。
B、接控制線(CN2)時(shí),一定要有一端接屏蔽線。避免外界對(duì)控制信號(hào)的干擾。
C、布線一定要合理,交直流電源要嚴(yán)格分開,控制線要與電機(jī)動(dòng)力線,電源線嚴(yán)格分開。
3)、結(jié)果:
運(yùn)行后,能很好滿足客戶要求,電機(jī)聲音良好,聽不到聲音,響應(yīng)性能很好達(dá)到客戶要求。客戶對(duì)調(diào)節(jié)后的結(jié)果很滿意。
六、故障與排除方法
1)、故障:上位機(jī)一給信號(hào)電機(jī)就跑飛了,驅(qū)動(dòng)器出現(xiàn)09號(hào)報(bào)警;
排除方法:檢查電機(jī)動(dòng)力線(U,V,W)相序是否接錯(cuò),查看驅(qū)動(dòng)器PA9(電機(jī)型號(hào)選擇)是否設(shè)置正確。
2)、故障:出現(xiàn)27號(hào)報(bào)警
排除方法:查看電機(jī)編碼器線(CN3)是否松了。固定好后在試。
3)、故障:上位機(jī)發(fā)送脈沖,電機(jī)不運(yùn)行
排除方法:查看控制線(CN2)中的信號(hào)線是否錯(cuò),查看伺服驅(qū)動(dòng)器PA64看是否設(shè)置正確,驅(qū)動(dòng)器內(nèi)部使能(PA64=64),上位機(jī)使能(PA64=0).
4)、故障:運(yùn)行過程中出現(xiàn)01號(hào)報(bào)警;
排除方法:過載保護(hù),看P81(瞬間過載倍數(shù))是否設(shè)置過低。可以相對(duì)把P81設(shè)置高些。
七、總結(jié)
此擺盒機(jī)充分結(jié)合了東能伺服EPS2系列的響應(yīng)快、定位精確、整定時(shí)間短、運(yùn)行平穩(wěn)以及電機(jī)聲音小等優(yōu)點(diǎn)。從而很好滿足客戶對(duì)擺盒機(jī)的要求,使客戶達(dá)到最大的滿意度。此設(shè)備向客戶充分展示了東能伺服的優(yōu)勢,同時(shí)也提高了擺盒機(jī)在市場上的競爭力。
