
水電站計算機監(jiān)控系統(tǒng)的優(yōu)劣在一定意義上代表著該水電站的自動化控制水平,它直接影響機組的運行安全、電能質量以及生產效益等。
從目前水電站自動化水平的發(fā)展需求看,可編程邏輯控制器PLC(ProgrammableLogicController)在高速數據處理、網絡通信以及系統(tǒng)擴展等方面的能力已經不能滿足要求,而新一代的可編程計算機控制器PCC(ProgrammableComputerController)不僅擁有PLC穩(wěn)定可靠的優(yōu)點,同時也具備了工業(yè)控制計算機強大的數據處理及通信能力、豐富的編程語言,諸多優(yōu)點已使其能夠勝任大型的集散控制以及復雜的控制過程。
本文介紹的系統(tǒng)基于B&R2005系列PCC,采用ANSIC語言編制控制程序,同時以最小二乘法對機組模擬量進行濾波,并基于幀驅動器以及OPCServer實現了PCC控制系統(tǒng)同外部智能設備及上位機的通信,組成了一個較先進的適用于中小型水電站的開放式監(jiān)控系統(tǒng)。
1系統(tǒng)監(jiān)控方式與組成結構
以計算機為基礎的監(jiān)控方式CBSC(Computer-BasedSupervisoryControl)是目前國內外水電廠普遍采用的計算機監(jiān)控方式。CBSC模式的主要特點是電廠的主要監(jiān)控功能全部由計算機實現,大大簡化常規(guī)控制裝置,僅留一部分現地操作設備以備特殊情況,但由于位于監(jiān)控系統(tǒng)較底層的現地控制單元LCU(LocalControlUnit)一般都以PLC作為其控制核心,在數據處理、通信上功能不夠強大,用戶如要擴展或升級系統(tǒng)就需要相當大的投入,而PCC則依靠其豐富靈活的通信模塊成功解決了這一問題,使CBSC監(jiān)控方式更加靈活有效。
結合廣西宜州拉浪水電站的實際情況,本系統(tǒng)基于B&R2005系列中型PCC并以CBSC方式設計監(jiān)控系統(tǒng)。該系統(tǒng)控制核心PCC由一系列獨立封裝的盒式模塊組成,基本模塊包括電源模塊和CPU模塊,擴展模塊包括I/O模塊、通信模塊等。
在該系統(tǒng)中,調速器、電量儀及溫度巡檢儀等智能設備能夠穩(wěn)定地同PCC通信并將數據送入PCC,而PCC則通過以太網(基于TCP/IP協(xié)議)同上位機監(jiān)控終端通信,同時也將數據送至位于LCU上的人機界面顯示。這種模式彌補了設備分散帶來的不足,使運行人員可以在上位機或人機界面上監(jiān)控機組運行狀態(tài),實現真正的集散式監(jiān)控系統(tǒng)。該系統(tǒng)結構如圖1所示。

圖1系統(tǒng)結構
2現地控制單元程序設計
2.1控制程序設計
2.1.1任務層設計
PCC的操作系統(tǒng)是一個分時多任務操作系統(tǒng),該系統(tǒng)可使控制系統(tǒng)得以優(yōu)化,擁有更好的穩(wěn)定性和實時性。在控制程序中,各個任務程序模塊依據其自身的重要性、實時性要求,分別位于優(yōu)先級不同的任務層下,完成不同的功能。例如,事故故障處理直接影響水輪機組的安全運行,因此,該模塊被置于任務層Cyclic#1中;而對實時性要求相對不高的模塊如通信程序模塊,則被置于任務層Cyclic#4中。
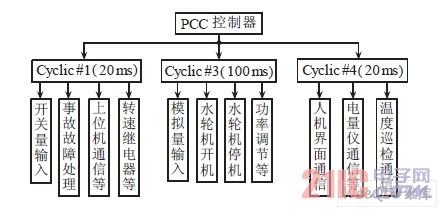
圖2為控制程序各個任務程序模塊的任務層分布(括號內時間分別表示不同任務層的循環(huán)時間)
2.1.2模擬量處理程序設計
機組模擬量如壓力、溫度等對整個水輪機組的正常運行起著至關重要的作用,因此需要對模擬量進行濾波以保證數據的準確性。以PLC為核心的控制系統(tǒng)對模擬量值的濾波一般是通過將模/數轉換器得到的數值進行平均N次得以實現,存在著可靠性差等缺點。該程序則基于最小二乘法對模擬量數據進行擬合處理,并可根據傳感器特性的變化調整參數,提高了數據的可靠性。最小二乘法即:選擇適當的a,b,使式(1)中的ε最小。

因為ε是a,b的函數,用求極值的方法可知應滿足:
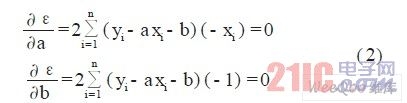
解出a,b:

則:

式中Yi為第i個模擬量通道的數據處理結果;Xi為從傳感器讀取的第i個模擬量通道的初始值;ai,bi為對應該通道的參數;n為平均次數,程序中一般取20次。
模擬量處理模塊部分程序如下:

2.2通信程序設計
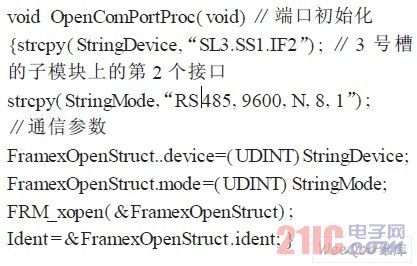
LCU與外部設備如電量儀等的通信基于幀驅動器。幀驅動器是一種介于應用程序和硬件接口之間的軟件工具箱,它使幀以字節(jié)流的形式進行發(fā)送與接收,無需驅動器對這些幀進行操作。
a.初始化。通信開始時,通過幀命令FRM_xopen(enbale,device,mode)初始化端口,其參數定義了接口設備、接口參數以及數據傳輸狀態(tài)等。
b.數據發(fā)送與接收。函數FRM_xopen()初始化完成后返回緩沖區(qū)的地址及其長度,然后調用memcpy()將數據寫入緩沖區(qū),并將數據發(fā)送出去。
數據接收的過程與發(fā)送基本相反,幀驅動器首先調用FRM_read()讀取1幀數據并把它放在緩沖區(qū)中,然后由memcpy()讀出該緩沖區(qū)的內容。
通信模塊部分程序如下:
3上位機監(jiān)控實現
3.1OPC服務器
上位機監(jiān)控功能是借助OPC(OLEforProcessControl)服務器為橋梁實現上位機組態(tài)軟件對機組數據信息的共享的。OPC是一個工業(yè)標準,它為不同廠商的硬件設備、軟件和系統(tǒng)定義了公共的接口,使過程控制和工廠自動化中的不同系統(tǒng)、設備和軟件之間能夠互相連接、通信、操作。監(jiān)控系統(tǒng)采用OPC協(xié)議與其他現場設備通信的優(yōu)點在于:不管硬件設備是否使用標準的通信協(xié)議,制造商只需要提供1套OPC服務器,就可以支持大部分的監(jiān)控等軟件,也不需要將自己的通信協(xié)議細節(jié)提供給軟件商。
OPC服務器軟件主要分為OPC服務器對象模塊、服務器界面模塊和OPC驅動程序模塊,3個模塊通過同一塊主內存數據區(qū)共享數據,通過線程的同步和互斥等技術的使用,可解決共享數據的保護問題。
在該系統(tǒng)中,上位監(jiān)控計算機啟動后,系統(tǒng)自動加載一個被B&R稱之為“PVI”的系統(tǒng)模塊,同時PVI啟動同封裝在PCC操作系統(tǒng)中的OPC服務器的通信(在本系統(tǒng)中基于TCP/IP協(xié)議)。PVI的核心部分為“PVImanager”,在“PVImanager”中用戶可根據需要選擇性定義從OPC服務器傳輸的數據。B&RPVI的基本構成(見B&R2005User’sManual,2004)如圖3所示。

圖3PVI基本構成
3.2組態(tài)程序設計
該系統(tǒng)的組態(tài)程序采用北京亞控“組態(tài)王6.03”設計。“組態(tài)王6.03”有比較完善的報警和事件系統(tǒng)、報表系統(tǒng)及支持Windows標準的ActiveX控件,同時全面支持OPC標準,可以通過PVI很方便地實現同PCCOPCServer的數據共享,完成諸如開關量監(jiān)視記錄和事件順序記錄、事故追憶和故障錄波、自動發(fā)電控制(AGC)、自動電壓控制(AVC)等監(jiān)控功能。
4結語
本文結合發(fā)展迅速的PCC技術,介紹了一種新型高效的水電站計算機監(jiān)控系統(tǒng)。該系統(tǒng)基于B&R2005系列PCC,在以最小二乘法對機組模擬量進行濾波的基礎上,實現了機組的各種控制與保護功能,并基于幀驅動器以及OPCServer實現了PCC控制系統(tǒng)同外部智能設備及上位機的通信,組成了一個較先進的適用于中小型水電站的開放式監(jiān)控系統(tǒng)。
該監(jiān)控系統(tǒng)自現場安裝調試完畢至今,已安全可靠地穩(wěn)定運行了將近1年。PCC可能將會依靠其強大的性能逐漸取代PLC,,成為水電廠自動化改造中不可或缺的一部分。