
現(xiàn)代高性能作戰(zhàn)飛機普遍采用推力矢量技術,各種高空高速高機動再人彈頭的威脅愈顯突出,這對傳統(tǒng)氣動舵控制的導彈系統(tǒng)提出新的要求。現(xiàn)代導彈要求能夠選擇攻擊目標,具有一定的抗干擾能力,實現(xiàn)全天候作戰(zhàn),這使得導彈向高精度、高智能、輕小型化發(fā)展;同時,導彈制導控制精度的提高已從制導轉(zhuǎn)向控制。導彈目標范圍不斷擴大,由反飛機擴大至反巡航導彈、反彈道式導彈等反導任務。高空、高速、大機動已成為當今導彈目標的重要特征,目標的高速大機動特征導致彈一目相對運動加劇,對導彈末端過載提出很高要求;另一方面,目標的高空特征導致導彈系統(tǒng)效率大大降低,可用過載隨高度的升高而大幅下降。為了解決這些矛盾,這里采用PID控制方法控制導彈的俯仰、偏航、滾動3個通道。
2 模型的建立
研究導彈制導問題,必須以一定的數(shù)學模型為基礎。因此,在選擇適當?shù)淖鴺讼岛螅治鐾茖С鰧椀姆滞ǖ赖睦硐肟刂七\動學模型,并建立舵機模型。
2.1 分通道的理想控制動力學方程
導彈由于存在滾動角,會造成耦合現(xiàn)象,從而增加控制困難,降低控制精度,故應盡量減少耦合,分通道控制。由于導彈的對稱性,當滾動角為零或較小時,忽略俯仰與偏航的耦合,即單輸入單輸出系統(tǒng)。因此可用經(jīng)典控制理論分通道來研究、分析和設計導彈的控制系統(tǒng)。
縱向運動為導彈縱向動力學方程為:
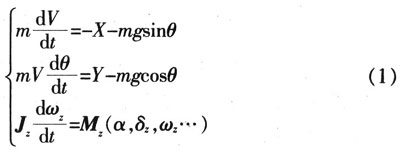
式中,![]() 為切向力,
為切向力,![]() 為法向力,
為法向力,![]() 為俯仰力矩,m為導彈質(zhì)量,V為導彈的飛行速度矢量,α為攻角,θ為彈道的傾角,δz為俯仰舵偏角,ωz為導彈繞彈體坐標系oz1軸的角速度,X,Y為彈上的總空氣動力沿速度坐標系分解的阻力、升力,Jz為導彈繞彈體坐標系oz1軸的轉(zhuǎn)動慣量,Mz為俯仰力矩。
為俯仰力矩,m為導彈質(zhì)量,V為導彈的飛行速度矢量,α為攻角,θ為彈道的傾角,δz為俯仰舵偏角,ωz為導彈繞彈體坐標系oz1軸的角速度,X,Y為彈上的總空氣動力沿速度坐標系分解的阻力、升力,Jz為導彈繞彈體坐標系oz1軸的轉(zhuǎn)動慣量,Mz為俯仰力矩。
而側(cè)向運動為航向和橫向相互交聯(lián)耦合,則導彈側(cè)向動力學方程為:
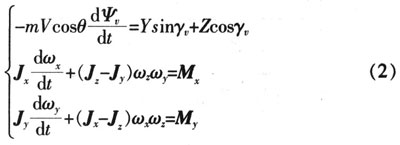
式中,-mVcosθ(dψv/dt)為導彈質(zhì)心加速度的水平分量,“-”表示向心力為正,所對應的ψv為負,反之亦然。它是由角度正負號定義所決定的,dωx/dt、dωy/dt為導彈轉(zhuǎn)動角加速度矢量在彈體坐標系軸上的分量,Jx、Jy、Jz分別為導彈繞彈體坐標系ox1、oy1、oz1軸的轉(zhuǎn)動慣量,Mx、My分別為滾轉(zhuǎn)力矩和偏航力矩,Y、Z分別為彈上的總空氣動力沿速度坐標系分解的升力、側(cè)向力,ωx、ωy、ωz分別為導彈繞彈體坐標系ox1、oy1、oz1軸的角速度。
2.2 舵機模型
2.2.1 電動機模型建立
電動機控制原理圖如圖1所示。
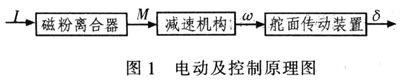
設減速比i,總轉(zhuǎn)動慣量J,力矩M,輸入電壓u,電流I,電感L,電阻R,鼓輪的角速度與轉(zhuǎn)角分別為ω和δk,舵偏角δ,電動舵機的力矩特性近似為A,機械特性近似為-B,Mj是鉸鏈力矩,![]() 是單位舵偏角產(chǎn)生的鉸鏈力矩,TM=L/R為電動機的電氣時間常數(shù),則舵機在有載情況下的傳遞函數(shù)為:
是單位舵偏角產(chǎn)生的鉸鏈力矩,TM=L/R為電動機的電氣時間常數(shù),則舵機在有載情況下的傳遞函數(shù)為:

2.2.2 舵回路
舵面的鉸鏈力矩對舵機的影響很大,飛行控制系統(tǒng)采用閉環(huán)回路設計,消除其影響。舵回路一般采用位置和速度兩種反饋補償方式消除鉸鏈力矩對其的影響。
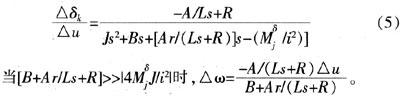
位置反饋的傳遞函數(shù)為:

當![]() 。因此,引入較強反饋,電機輸出轉(zhuǎn)交正比于輸入電壓,與反饋量成正比,而與鉸鏈力矩的大小無關。
。因此,引入較強反饋,電機輸出轉(zhuǎn)交正比于輸入電壓,與反饋量成正比,而與鉸鏈力矩的大小無關。
速度反饋的傳遞函數(shù)為:
根據(jù)以上分析,引入較強速度反饋時,則電機輸出角速度正比于輸入電壓,而與飛行狀態(tài)即鉸鏈力矩的大小無關。
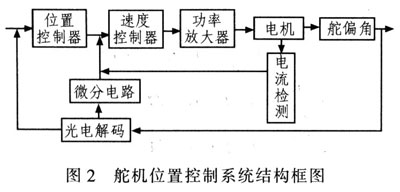
因此,舵機位置控制系統(tǒng)的系統(tǒng)結(jié)構(gòu)如圖2所示。
3 分通道PID控制
導彈飛行姿態(tài)是通過控制導彈的3個舵面(即升降舵、方向舵、滾動舵)的偏轉(zhuǎn),改變舵面的空氣動力特性,形成圍繞導彈質(zhì)心的旋轉(zhuǎn)矩,實現(xiàn)飛行姿態(tài)的改變。角位置控制分為3個通道,俯仰通道(控制俯仰角)、偏航通道(控制偏航角)、滾動通道(控制滾動角)。
3.1 舵機的PID控制
根據(jù)圖2所示的舵機位置控制系統(tǒng)結(jié)構(gòu)框圖,其中電流環(huán)節(jié)采用電流計反饋,轉(zhuǎn)速反饋用速測發(fā)電機,位置反饋用光電編碼器。舵機采用三閉環(huán)控制設計,即電流環(huán),轉(zhuǎn)速環(huán)和位置環(huán)。可用“臨界比例度法”初步確定PID參數(shù)。此方法適用于已知對象傳遞函數(shù)的場合,閉合的控制系統(tǒng)中將調(diào)節(jié)器置于純比例作用下。從大到小逐漸改變調(diào)節(jié)器的比例度,得到等幅振蕩的過渡過程。此時的比例度成為臨界比例度δk,相鄰兩個波峰間的時間間隔稱為臨界振蕩周期Tk,由此計算出各個參數(shù),即Kp、Ti、Td的值。
3.2 縱向通道控制
傳統(tǒng)的控制方案是將舵機簡化為一個放大環(huán)節(jié),系統(tǒng)僅存在角速度反饋,其縱向通道傳遞函數(shù)為:

式中,KM為傳遞系數(shù),TM為時間常數(shù),ξM為相對阻尼系數(shù),T1為氣動力常數(shù)。
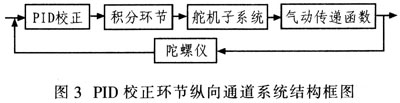
在設計精確考慮舵機環(huán)節(jié)的縱向通道時,需加入PID校正環(huán)節(jié),分析系統(tǒng)使其滿足設計要求,圖3為其控制系統(tǒng)結(jié)構(gòu)框圖。
3.3 橫向通道控制
當滾動通道的輸入指令為零時,即保持滾動角和角速度為零,則消除了俯仰通道和偏航通道的耦合作用,可分別控制3個通道。此時,對稱結(jié)構(gòu)導彈的俯仰通道和偏航通道的控制基本相同。
3.4 滾動通道控制
將舵機環(huán)節(jié)引入滾動通道,與縱向通道及航向通道類似,引入PID校正環(huán)節(jié),分析系統(tǒng),其角速度傳遞函數(shù)為:

式中,KMx為傳遞系數(shù),TMx為傾斜時間常數(shù)。
4 仿真結(jié)果
為驗證控制方案的正確性和控制效果,則給定以下導彈參數(shù):KM=0.171 7(1/s)、TM=0.085 0(s)、ξM=0.111 2、T1=6.521 7(s)、KMx=170.778 9、TMx=1.006 3(s)分別對舵機系統(tǒng)、縱向通道系統(tǒng)、橫向通道系統(tǒng)、滾動通道系統(tǒng)加入單位階躍信號進行數(shù)字仿真,并對傳統(tǒng)控制系統(tǒng)進行仿真,對比控制結(jié)果。圖4為舵機系統(tǒng)時域階躍響應曲線。由圖4仿真曲線看出,超調(diào)量9.5%,上升時間41.9 ms,調(diào)節(jié)時間(2%誤差帶)88.8 ms,穩(wěn)態(tài)誤差為0。
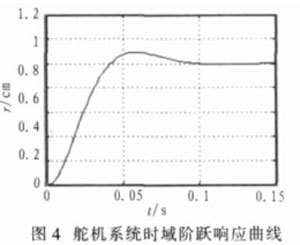
圖5為縱向通道時域階躍響應曲線,從圖5仿真曲線可看出,在精確考慮舵機環(huán)節(jié)情況下,PID校正環(huán)節(jié)縱向通道時域階躍響應曲線反應良好,超調(diào)量11.4%,上升時間170.6 ms調(diào)節(jié)時間(2%誤差帶)356.3 ms,穩(wěn)態(tài)誤差為0。
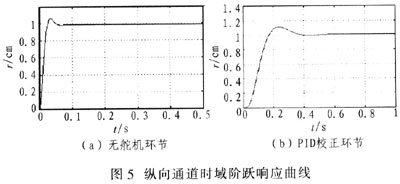
圖6為橫向通道時域階躍響應曲線。從圖6仿真曲線看出,在精確考慮舵機環(huán)節(jié)情況下,PID校正環(huán)節(jié)橫向通道時域階躍響應曲線反應良好,超調(diào)量11.4%,上升時間168.3 ms調(diào)節(jié)時間(2%誤差帶)347.1 ms,穩(wěn)態(tài)誤差為0。
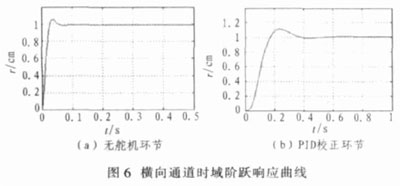
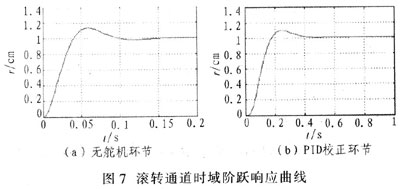
圖7為滾轉(zhuǎn)通道時域階躍響應曲線。從圖7的仿真曲線可看出,在精確考慮舵機環(huán)節(jié)的情況下,PID校正環(huán)節(jié)滾轉(zhuǎn)通道的時域階躍響應曲線反應良好,超調(diào)量9.81%,上升時間為178.6 ms,調(diào)節(jié)時間(2%誤差帶)397.1 ms,穩(wěn)態(tài)誤差為0。
5 結(jié)論
本文利用臨界比例度法得到PID參數(shù),利用MATLAB/Simulink進行時域仿真,從仿真結(jié)果看,該PID分通道控制方法可以提高傳統(tǒng)氣動舵導彈控制系統(tǒng)的準確性、快速性及穩(wěn)定性。當然這只是給出與傳統(tǒng)控制方案相比較的結(jié)果,實際的參數(shù)還要在實物仿真中不斷調(diào)試,并對控制系統(tǒng)修正改進,以得到令人滿意的控制效果。仿真結(jié)果表明,各通道系統(tǒng)反映良好,能夠?qū)崿F(xiàn)實時控制要求。