
摘要:為實現(xiàn)智能儀器的遠程控制,提高控制系統(tǒng)的速度,采用現(xiàn)場可編程門陣列(FPGA)芯片、USB芯片等實現(xiàn)了智能儀器遠程控制系統(tǒng)的設(shè)計。重點介紹RS232與USB的接口轉(zhuǎn)換原理及FPGA程序設(shè)計和仿真。系統(tǒng)采用先入先出存儲器和有限狀態(tài)機實現(xiàn)了RS232與USB的接口轉(zhuǎn)換,并實現(xiàn)上位機的控制、數(shù)據(jù)處理等功能。系統(tǒng)可大大減少上位機的工作量,不僅可以用于實驗室也可應(yīng)用在工業(yè)生產(chǎn)中。
目前智能儀器已廣泛應(yīng)用于科研和工業(yè)生產(chǎn)當中,但是許多儀器分散在不同的地理位置上,不易操作和維護,并且實時跟蹤性能差,人為誤差大,數(shù)據(jù)無法保存,另外大量高檔儀表價格相當昂貴。為解決上述難題,在計算機的提示下完成操作,可以減少人為因素造成的損壞,并提高測試數(shù)據(jù)的準確度。由于智能儀器是RS232接口,上位機用的是USB接口,所以還需由FPGA實現(xiàn)RS232與USB之間的接口轉(zhuǎn)換。由于FPGA可以并行處理,集成度高,可用資源豐富,所以利用FPGA進行數(shù)據(jù)處理,可以減少上位機的工作量,減少數(shù)據(jù)處理的時間,還可以縮短設(shè)計周期,減小板卡體積,以便于集成到其他板卡上。
1 控制系統(tǒng)及接口簡介
1.1 系統(tǒng)功能
在整個系統(tǒng)中,上位機可以實時對系統(tǒng)進行監(jiān)控,并下發(fā)相應(yīng)的命令。智能儀器傳出的數(shù)據(jù)通過RS232接口傳送到FPGA,F(xiàn)PGA根據(jù)上位機下發(fā)的命令對這些數(shù)據(jù)進行判決、處理,然后經(jīng)過USB接口上傳給上位機,再由上位機對FPGA處理過的數(shù)據(jù)進行顯示、存儲等操作。
1.2 USB接口芯片簡介
本設(shè)計采用的是CYPRESS半導(dǎo)體公司的EZUSBFX2系列芯片CY7C68013。CY7C68013是一款高性能USB 2.0微控制器,它提供了全面的USB 2.0外圍設(shè)備解決方案。工作模式有Port,Slave FIFO和GPIFMaster三種,本方案采用Slave FIFO模式。在該模式下,外部控制器(如FPGA)可像對普通FIFO一樣對FX2中端點為2,4,6,8的數(shù)據(jù)緩沖區(qū)進行讀/寫。FX2內(nèi)嵌的8051固件的功能只是配置Slave FIFO相關(guān)的寄存器,以及控制FX2何時工作在Slave FIFO模式下。一旦8051固件將相關(guān)的寄存器配置完畢,且使自身工作在Slave FIFO模式下后,外部邏輯(如FPGA)即可按照Slave FIFO的傳輸時序,高速地與主機進行通信,而在通信過程中不需要8051固件的參與。
1.3 RS232接口簡介
RS232C標準(協(xié)議)的全稱是EIARS232C標準。EIARS232C是用正負電壓來表示邏輯狀態(tài)的,與TTL以高低電平表示邏輯狀態(tài)的規(guī)定不同。因此,為了能夠與計算機接口或終端的TTL器件連接,必須使EIARS232C與TTL電路之間進行電平和邏輯關(guān)系的變換。實現(xiàn)這種變換的方法可用分立元件,也可用集成電路芯片。該設(shè)計用的是MAX3232芯片。
RS232的數(shù)據(jù)傳輸格式如圖1所示。

圖1 RS232標準的數(shù)據(jù)傳輸格式
RS232傳輸格式包含起始位(1b)、有效數(shù)據(jù)位(8b)、奇偶校驗位(0~2b)、停止位(1b)。傳輸線在空閑時為高電平,因此起始位為低電平,停止位為高電平。
奇偶校驗位可設(shè)置為奇校驗、偶校驗或不校驗,有效數(shù)據(jù)位是從低位開始傳送。
2 FPGA設(shè)計
2.1 USB接口時序
在Slav e FIFO方式下,外部邏輯與FX2的連接信號如圖2所示。
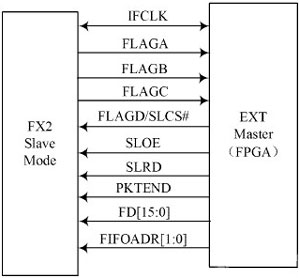
圖2 FX2 Slave模式下接口管腳連接圖
在Slav e FIFO模式下,CY7C68013芯片為端口2,4,6,8 提供滿空標志位FLAGA,F(xiàn)LAGB,F(xiàn)LAGC,F(xiàn)LAGD。IFCLK為FX2輸出的時鐘,可作通信的同步時鐘;SLCS為FIFO的片選信號;SLOE為FIFO輸出使能;SLRD為FIFO讀信號;SLWR為FIFO寫信號。對FPGA來說,4個端口分別為4個FIFO。
FPGA檢測4個滿空標志位來分別對相應(yīng)的FIFO進行讀/寫。FPGA可以選擇同步或異步讀/寫,在該設(shè)計中采用異步讀/寫。在異步Slave FIFO寫時,時鐘由FPGA提供。數(shù)據(jù)在SLWR的每個有效-無效的跳變沿時被寫入,F(xiàn)IFO寫指針遞增。異步Slave FIFO讀時,F(xiàn)IFO讀指針在SLRD的每個有效-無效的跳變沿時遞增以改變數(shù)據(jù)。
2.2 FPGA程序設(shè)計
FPGA設(shè)計是整個系統(tǒng)的核心部分,由VHDL語言實現(xiàn)。FPGA實現(xiàn)了USB與RS232接口的轉(zhuǎn)換、數(shù)據(jù)的處理、命令的傳輸?shù)裙δ堋S辛松厦娴慕涌跁r序,便可以進行FPGA設(shè)計。FPGA部分的總體設(shè)計如圖3所示。模塊介紹:
USB與FPGA接口模塊:USB與FPGA之間的接口轉(zhuǎn)換模塊,主要功能為將USB接口傳過來的信息緩存到FPGA內(nèi)部FIFO,并將由數(shù)據(jù)處理模塊處理過的數(shù)據(jù)傳給USB芯片。即產(chǎn)生控制信號讀/寫USB芯片內(nèi)部FIFO。可以由讀/寫FIFO兩個有限狀態(tài)機實現(xiàn)。
以讀取CY7C68013芯片內(nèi)數(shù)據(jù)為例,根據(jù)異步讀USB內(nèi)的FIFO時序圖可分為4個狀態(tài):空閑態(tài)、選擇地址態(tài)、準備讀數(shù)據(jù)態(tài)、讀數(shù)據(jù)態(tài)、讀取后狀態(tài)[6] 。在空閑態(tài),當讀事件發(fā)生時進入選擇地址態(tài);在選擇地址態(tài),使FIFOADR[1: 0] 指向OUT FIFO,進入準備讀數(shù)據(jù)態(tài);在準備讀數(shù)據(jù)態(tài),如FIFO空,在本狀態(tài)等待,否則進入讀數(shù)據(jù)態(tài);在讀數(shù)據(jù)態(tài),使SLOE,SLRD有效,從數(shù)據(jù)線上讀數(shù),再使SLRD無效,以遞增FIFO讀指針,再使SLOE無效,進入讀取后狀態(tài);在讀取后狀態(tài),如需傳輸更多的數(shù),進入準備讀數(shù)據(jù)態(tài),否則進入空閑態(tài)。
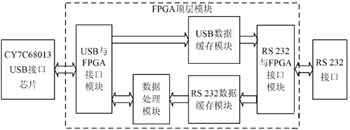
圖3 FPGA總體設(shè)計框圖
USB數(shù)據(jù)緩存模塊:用來緩存計算機發(fā)給智能儀器的指令等信息。是由FPGA芯片的IP核生成的先入先出存儲器FIFO。容量為8b*512depth。占用1個塊RAM資源。
RS232數(shù)據(jù)緩存模塊:用來緩存由智能儀器發(fā)出的數(shù)據(jù)。是由FPGA IP核生成的先入先出存儲器FIFO。容量為8b*512depth,占用1個塊RAM資源。
RS232與FPGA接口模塊:RS232與FPGA之間的接口轉(zhuǎn)換模塊。主要功能為進行串/并和并/串轉(zhuǎn)換。
將USB數(shù)據(jù)緩存模塊中緩存的內(nèi)容以合適的速率通過串口發(fā)給智能儀器,并將智能儀器發(fā)出的數(shù)據(jù)緩存到RS232數(shù)據(jù)緩存模塊中。此模塊也是由兩個狀態(tài)機實現(xiàn)。串口通信必須要設(shè)定波特率,這里采用的波特率為9600Kb/s,采用的時鐘為50MHz,相當于傳送1位數(shù)據(jù)需要約5028個時鐘周期,這里采用減法計數(shù)器來控制,即計數(shù)器計到5028個時鐘周期后,就開始傳輸下一位數(shù)據(jù)。
數(shù)據(jù)處理模塊:主要功能為根據(jù)上位機的指令對RS232數(shù)據(jù)緩存中的數(shù)據(jù)做出相應(yīng)的處理。處理后再向上位機傳。主要的處理方式有定時取數(shù)、平滑處理等。實現(xiàn)方式由狀態(tài)機等實現(xiàn)。FPGA頂層模塊:主要負責各模塊間數(shù)據(jù)流的流向。以及與外部芯片相連的輸入輸出信號的定義。
系統(tǒng)在工作時,在采集數(shù)據(jù)上傳上位機時,數(shù)據(jù)通道為:智能儀器發(fā)送的數(shù)據(jù)通過RS232接口模塊存在RS232數(shù)據(jù)緩存模塊中緩存。當緩存到一定的數(shù)據(jù)量后,再通過數(shù)據(jù)處理模塊連續(xù)的讀取FIFO中的數(shù)據(jù)并根據(jù)上位機發(fā)送的命令進行相應(yīng)的數(shù)據(jù)處理,然后將處理的數(shù)據(jù)通過USB與FPGA接口模塊傳給USB接口。在上位機下發(fā)控制命令時,數(shù)據(jù)通道為:上位機發(fā)送的命令通過USB口傳給FPGA的RS232與FPGA接口模塊,此模塊判斷是數(shù)據(jù)處理指令還是控制儀器指令。如果是數(shù)據(jù)處理指令,則傳向數(shù)據(jù)處理模塊讓其按要求進行數(shù)據(jù)處理。如果是控制儀器指令,則將其存入USB數(shù)據(jù)緩存模塊中,再由RS232與FPGA接口模塊讀取,轉(zhuǎn)成RS2322格式后傳出。由于RS232接口速度比USB接口慢,用FPGA內(nèi)部的異步時鐘FIFO解決速率匹配問題。
將通過RS232傳過來的數(shù)據(jù)緩存在FIFO中,然后存到一定數(shù)據(jù)量后再全部連續(xù)的取出,如此往復(fù),從而實現(xiàn)數(shù)據(jù)的連續(xù)采集及上位機的實時顯示。將通過USB傳過來的數(shù)據(jù)放在另一個FIFO中緩存,讓FPGA按照RS232的速率進行讀取。這樣可以防止RS232的速度跟不上USB的速度而產(chǎn)生的數(shù)據(jù)丟失。
3 仿真結(jié)果
FPGA采用的系統(tǒng)時鐘頻率為50MHz,仿真工具為Modelsim SE 6.5a,仿真用數(shù)據(jù)為連續(xù)的8b數(shù)據(jù)。
仿真結(jié)果如圖4所示。
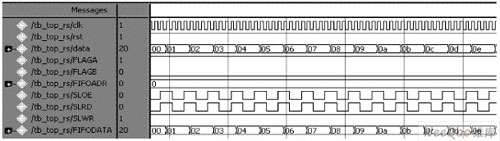
圖4 FPGA讀USB內(nèi)部FIFO仿真圖
圖4為FPGA讀USB內(nèi)部FIFO的仿真結(jié)果,DATA為模擬從USB口接到的數(shù)據(jù),該數(shù)據(jù)已存在于USB芯片的FIFO中。FIFO DATA為FPGA接到的數(shù)據(jù),由上可以看出,F(xiàn)PGA可以將USB接受到的數(shù)據(jù)解析出來。
圖5為RS232與FPGA接口部分仿真結(jié)果。可以看出,由RS232接收串行數(shù)據(jù)RXD已經(jīng)轉(zhuǎn)換為并行數(shù)據(jù)din。程序中是在一個有效字節(jié)結(jié)束后將其存入FIFO中,由圖可以驗證。圖6頂層模塊仿真圖,為了驗證由FPGA發(fā)出的數(shù)據(jù)能正確的接受到,先由FPGA內(nèi)部發(fā)數(shù)據(jù),然后通過RS232的TXD端口發(fā)出,讓RXD與TXD相連再接收,可以看出發(fā)出的數(shù)據(jù)可以被正確的接收回來并傳向USB接口,說明時序正確。
同理可以驗證USB端的收發(fā)時序。

圖5 RS232接收端仿真圖

圖6 頂層模塊仿真圖
4 結(jié) 語
本文采用FPGA實現(xiàn)了USB與RS232間的接口轉(zhuǎn)換及數(shù)據(jù)處理的功能。設(shè)計中先入先出存儲器的運用解決了數(shù)據(jù)的緩存的和速率匹配問題,有限狀態(tài)機的運用使得程序設(shè)計更加清晰可靠。該設(shè)計將復(fù)雜的信號運算集中在FPGA中完成,利用FPGA獨特的并行處理能力,減小上位機工作量的同時,提高了系統(tǒng)運行速度。
作者:謝燕平 郭靜 延鳳平 北京交通大學(xué)光波技術(shù)研究所 來源:《現(xiàn)代電子技術(shù)》2011年第4期