
摘 要: 針對精密I號裝配機器人存在的問題,介紹了自行研制的新型精密I號裝配機器人控制系統(tǒng)。它利用雙系統(tǒng)背板和帶Semaphore邏輯單元的雙端口RAM建立了緊耦合雙機系統(tǒng)。改善了原有系統(tǒng)的開放性和可靠性。設(shè)計了新系統(tǒng)上的軟件系統(tǒng)。建立了一個完整的裝配機器人控制平臺。
關(guān)鍵詞: 裝配機器人 控制系統(tǒng) 雙口RAM Semaphore邏輯單元 多機系統(tǒng) 變磁阻電機
在許多微機應(yīng)用領(lǐng)域中,PC機的速度和功能往往不能滿足需要。特別是在多任務(wù)工作環(huán)境下,各任務(wù)只能分時工作。因此,要想在單處理器情況下進行多任務(wù)工作,則在實時性上存在問題。由于機器人特殊的結(jié)構(gòu),工業(yè)機器人的控制系統(tǒng)卻需要承擔規(guī)劃和伺服控制兩套任務(wù)。這兩套任務(wù)又必須保持實時高速的通訊,并由一個主系統(tǒng)支配。這就決定了其控制器結(jié)構(gòu)必須是緊耦合的多機系統(tǒng)。
精密Ⅰ號是我國1995年自行研制的高精度精密裝配機器人。原有系統(tǒng)的下位機為采用MultiBus總線的Intel iSBC386單板機,采用8038DX芯片,主頻20MHz。該系統(tǒng)采用iRMX Ⅲ實時多任務(wù)操作系統(tǒng),基本上滿足了精密Ⅰ號機器人控制的需要。但是該系統(tǒng)存在以下問題:(1)386的運算能力已經(jīng)遠遠落后于當前的硬件水平。由于機器人運動學、動力學運算任務(wù)繁重,原有系統(tǒng)只能勉強作帶動力學前饋的簡單PID控制。否則必須延長伺服中斷時間,犧牲控制精度。(2)原有系統(tǒng)采用iRMX Ⅲ非主流操作系統(tǒng),不但價格較貴,而且可以利用的軟、硬件資源匱乏。其下的程序編譯需要有專門的編譯系統(tǒng),編譯過程復雜。這些都不利于高級控制策略的程序?qū)崿F(xiàn)和調(diào)試,不利于深入研究和實際推廣。(3)原有系統(tǒng)的控制、驅(qū)動、信號接口等環(huán)節(jié)在可靠性和開放性方面也存在很多問題。由于機型和操作系統(tǒng)的非主流性,可利用的代換硬件和程序很難得到,需要專門人才,致使維修困難。
因此,我們采用研華雙系統(tǒng)背板奔騰333工控機重建了計算機控制系統(tǒng)。雙系統(tǒng)背板在一個機箱內(nèi)集成了兩套PC系統(tǒng),很適合機器人控制所需的上、下位機結(jié)構(gòu)。雙系統(tǒng)分別進行機器人的規(guī)劃和伺服控制,通過雙口RAM進行通訊,構(gòu)成一主一從的緊耦合多機系統(tǒng)。此外,重新設(shè)計了基于ISA總線的電機伺服擴展卡等硬件接口。
在驅(qū)動系統(tǒng)方面,精密Ⅰ號采用新型變磁阻類步進電機直接驅(qū)動。為了提高電機功率放大器的負載能力和可靠性,對原系統(tǒng)部分器件也作了更新。
1 帶Semaphore邏輯單元的雙口RAM的應(yīng)用
由于控制系統(tǒng)寬帶及靈活性,雙口RAM被廣泛用于連接多機系統(tǒng)。為了避免讀寫沖突,目前的雙口RAM產(chǎn)品集成了以下三種仲裁方法:(1)利用優(yōu)先權(quán)仲裁,產(chǎn)生Busy信號,延緩一方的讀寫周期。(2)采用中斷邏輯構(gòu)成CPU間的信號連接,協(xié)調(diào)讀寫操作。(3)采用Semaphore邏輯,將雙口RAM的讀寫權(quán)暫時交給首先申請的一方,禁止另一方的操作。本文采用了第三種方法,選用帶Semaphore邏輯單元的IDT71342雙口RAM芯片。
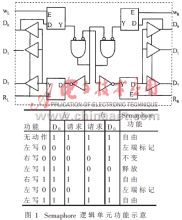
帶Semaphore邏輯單元的雙口RAM使得讀寫操作不依賴其它仲裁邏輯,Semaphore邏輯單元和雙口RAM單元在結(jié)構(gòu)上是完全獨立的。Semaphore邏輯單元用八個鎖存器傳遞信號,和RAM一樣是雙口。它經(jīng)過特殊設(shè)計,不會同時響應(yīng)兩個設(shè)置,只有置位的一端可以釋放它,因此提供了一個傳遞分配標記的硬件方法。可以從兩端對鎖存器設(shè)置標記,表示對雙口RAM某部分的使用權(quán)。所表示的占用RAM區(qū)的位置、大小均由軟件決定。Semaphore單元的簡化原理如圖1。
和其它兩種雙口RAM相比,本文的精密Ⅰ號控制器上采用Semaphore邏輯有以下優(yōu)點:(1)可以對一個大型數(shù)據(jù)表作刷新,而不用考慮被另一端干擾。(2)在進行數(shù)據(jù)塊讀寫時避免了Busy邏輯不斷引起的wait周期,提高了快速性;讀寫長整數(shù)時不會被誤讀。(3)可以利用Semaphor e信號表示其它意義的接口信號。
2 讀碼和伺服電路設(shè)計
從機器人本體來的信號主要有四個關(guān)節(jié)的增量碼盤信號,一、二關(guān)節(jié)的絕對碼盤信號、手爪氣閥反饋信號、力傳感器反饋信號等。所需的控制信號是四個電機的三相PWM輸入。機器人一、二關(guān)節(jié)采用雙定子變磁阻類步進電機直接驅(qū)動;三、四關(guān)節(jié)則用一種較特殊的三相直流無刷電機直接驅(qū)動,其本身不帶自動換向電路,需由計算機根據(jù)碼盤反饋改變電流,目的是減少力矩波動。此外還有關(guān)節(jié)抱剎開合、手爪開合等驅(qū)動信號。
根據(jù)上述信號制成兩塊ISA總線擴展卡,主要功能是完成碼盤信號(增量碼盤信號和絕對碼盤信號)輸入/輸出,產(chǎn)生驅(qū)動電流輸出給電機,以及完成電路自身的故障診斷和自我保護。
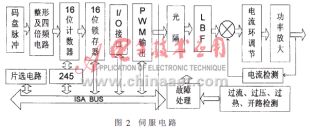
每塊卡產(chǎn)生兩個關(guān)節(jié)驅(qū)動器三相PWM信號的輸出信號和驅(qū)動器上電、復位、故障檢測等I/O動作信號。增量碼盤脈沖的A,B,Z信號經(jīng)D觸發(fā)器整形后作四倍頻處理,以提高精度。16位計數(shù)器根據(jù)A、B的相位作正負雙向計數(shù),計數(shù)值可由Z脈沖及電路板時鐘脈沖鎖存。絕對碼盤共32個區(qū),每區(qū)為周向七位編碼,最后一位是奇偶校驗,需要讓各關(guān)節(jié)轉(zhuǎn)動時才能讀出。其輸出為開關(guān)信號,由一路I/O口接入。電機MOSFET驅(qū)動器所需的三相PWM信號由四片8254產(chǎn)生,并經(jīng)OC門電路輸出。在原有驅(qū)動器上,我們用IRF250替換IRF640,并用2110替換MOSFET主回路H橋部分原有分離器件,提高了MOSFET的充、放電速度和驅(qū)動器的驅(qū)動能力。電路框圖如圖2。PWM信號傳送到H橋MOSFET IRF250構(gòu)成的功率驅(qū)動器,驅(qū)動電機。
3 系統(tǒng)軟件研制
PC機是在MS-DOS或Windows操作系統(tǒng)下工作的。MS-DOS是一個單任務(wù)操作系統(tǒng),Windows則是分時多任務(wù),均不能滿足機器人規(guī)劃、伺服同時進行的要求。為此,必須開發(fā)一個協(xié)調(diào)上、下位機各任務(wù)工作的實時監(jiān)控程序,它作為DOS或Windows下的一個應(yīng)用程序分別在兩個系統(tǒng)上運行。
本系統(tǒng)的軟件主要由機器人語言編譯模塊、多任務(wù)監(jiān)控模塊、雙系統(tǒng)握手通訊模塊、伺服控制模塊四部分構(gòu)成,如圖3。

系統(tǒng)在上電啟動后即初始化,建立雙系統(tǒng)聯(lián)系,根據(jù)Semaphore鎖存器的值及雙口RAM中的數(shù)據(jù)調(diào)度任務(wù),對機器人進行初始定位后對機器人語言命令編譯,分由上、下位機同時執(zhí)行。
下位機的各任務(wù)主要是初始定位、伺服驅(qū)動、根據(jù)機器人誤差模型作實時補償?shù)取R话憷媒^對碼盤作初始定位的工作多在器人規(guī)劃級進行,即由機器人上位計算機給出各關(guān)節(jié)的規(guī)劃軌跡點,讓伺服級軟件據(jù)此驅(qū)動關(guān)節(jié),同時上位機讀取絕對碼盤反饋以確定碼區(qū)并修正軌跡點完成定位。鑒于本機器人所用電機的特殊性,為了進一步提高初始定位過程的可靠性,精確度和平滑程度,我們嘗試將定位任務(wù)下放到伺服級,作為一個伺服任務(wù),根據(jù)電機電角度實時修改三相電流相位。事實證明這種改進是有效的,很好地改善了原有系統(tǒng)初始定位過程不穩(wěn)定、易飛車的狀況。
在伺服驅(qū)動部分,由于雙定子變磁阻電機在一個電周期中磁阻變化,需要對其非線性作一定補償,本文用制定力矩控制表的方法將一個電周期細分為3072,由下位機根據(jù)碼盤表明的電角度實時調(diào)節(jié)電流值,有效地控制了電機力矩波動。
參考文獻
1 精密Ⅰ號裝配機器人技術(shù)圖紙.上海交通大學機器人所,1995.8
2 水尾恒雅.DOS上ブマルチムを?qū)崿F(xiàn)方法.イニタフユス,1993;2:110~113
3 Corrado Guarino Lo Bianco,et al.Aprototype Controller for Variable Reluctance Motors.IEEE Trans.on Ind.Electron.,96;43(1):207~215