
0 引言
近年來隨著新材料技術的發(fā)展,特別是稀土永磁材料,磁性復合材料的出現(xiàn),加之我國擁有世界上最大的高能量密度永磁材料(釹—鐵—硼)的儲量,使得永磁電機活躍在各個工業(yè)生產(chǎn)中。永磁同步電機(PMSM)是近幾年發(fā)展起來的一種新型的電機,具有轉子轉動慣量小、效率高、功率密度大、可靠性高的優(yōu)點,因此十分適合應用于高性能伺服系統(tǒng)中,例如在數(shù)控機床等場合,永磁同步電動機正在逐步取代直流電機和感應電機。同時由于永磁同步電機無需激磁繞組,明顯地減小了體積,減輕了重量,降低了損耗,避免了電機發(fā)熱,從而提高了效率和功率因數(shù),具有明顯的節(jié)能效果。
尤其在現(xiàn)代的PMSM 運動控制系統(tǒng)中,它比異步電動機更便于實現(xiàn)磁場定向控制,可以獲得與直流電動機一樣優(yōu)良的轉矩控制特性,使控制系統(tǒng)具有十分優(yōu)良的動、靜態(tài)特性。
1 永磁同步電機的種類和基本結構
就轉子結構看,永磁同步電機分凸裝式、嵌入式和內埋式三種基本形式,如圖1 所示,前兩種又統(tǒng)稱為外裝式結構。凸裝式直軸磁阻與交軸磁阻相等,因此交、直軸電感相等,即Ld=Lq,表現(xiàn)為隱極性質;另外兩種結構,直軸磁阻大于交軸磁阻,因此Ld
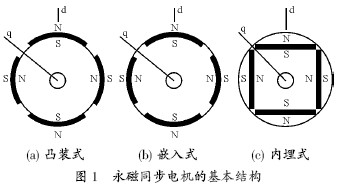
凸裝式結構簡單便宜,應用較多。這種結構中電機轉子直徑變得較小,從而導致電機的小慣量,故適用于伺服系統(tǒng)。然而在PMSM中小電感不總是有利,因為小電感將導致弱磁控制。在弱磁控制期間雖然電壓已經(jīng)達到逆變器所能提供的最大值,但速度依然需要不斷上升。弱磁控制是通過增加反相直軸定子電流分量實現(xiàn)的,若電感很小,就只能通過很大的去磁電流和低負載實現(xiàn)弱磁。
嵌入式結構可增大漏磁鏈,因增大的交軸電感使電樞的反應增大,致使極角增大和轉矩降低。
內埋式電機雖然結構復雜、昂貴,但它具有高氣隙磁通密度,因此它產(chǎn)生的轉矩比凸裝式電機產(chǎn)生的轉矩大,且氣隙磁通易于正弦分布,從而降低齒槽轉矩效應。
2 永磁同步電動機的特點
與傳統(tǒng)異步電機相比,永磁同步電機具有以下特點。
1)高效率、高功率因數(shù)、節(jié)能用永磁體代替電勵磁,不需要無功勵磁電流,可以顯著提高功率因數(shù)。定、轉子同步,轉子鐵心沒有鐵耗,PMSM 的效率較電勵磁同步電機和異步電機要高。而且,PMSM 在25%耀120%額定負載范圍內均可以保持較高的功率因數(shù)和效率,使電機在輕載運行時的節(jié)能效果更為顯著,這樣,在長期的使用中可以大幅度地節(jié)省電能。
2)動態(tài)響應快速、轉速平穩(wěn)PMSM 與異步電動機相比,具有較低的慣性,對于一定的電動機轉矩具有較快的響應,即轉矩/慣性比高。
3)體積小、重量輕隨著高性能永磁材料的不斷應用,PMSM 的功率密度大大提高,與同容量異步電機相比,其體積和重量有較大的減少。
4)應用范圍廣、可靠性高在醫(yī)療器械、化工、輕紡、儀器儀表等領域均獲得應用。與直流電動機和電勵磁同步電動機相比,永磁同步電動機沒有電刷,簡化了結構,提高了可靠性。
3 永磁同步電動機控制策略
永磁同步電機的調速主要通過改變供電電源的頻率來實現(xiàn)。目前常用的變頻調速方式有轉速閉環(huán)恒壓頻比控制(v/f)、轉差頻率控制、基于磁場定向的矢量控制(Vector Control)以及直接轉矩控制(Direct Torque Control)。
3.1 轉速閉環(huán)恒壓頻比控制
轉速閉環(huán)恒壓頻比控制是一種最常用的變頻調速控制方法。該方法是通過控制V/f恒定,使磁通保持不變,并以控制轉差頻率來控制電機的轉矩和轉速。這種控制方法低速帶載能力不強,須對定子壓降實行補償,因該控制方法只控制了電機的氣隙磁通,不能調節(jié)轉矩,故性能不高。但該方法由于實現(xiàn)簡單、穩(wěn)定可靠,調速方便,所以在一些對動態(tài)性能要求不太高的場合,如對通風機、水泵等的控制,仍是首選的方法。
3.2 轉差頻率控制
轉差頻率控制的突出優(yōu)點就在于頻率控制環(huán)節(jié)的輸入是轉差信號,而頻率信號是由轉差信號與實際轉速信號相加后得到的,這樣,在轉速變化過程中,實際頻率隨著實際轉速同步地上升或者下降。盡管轉差頻率控制能夠在一定程度上控制電機轉矩,但它依據(jù)的只是穩(wěn)態(tài)模型,并不能真正控制動態(tài)過程中的轉矩,從而得不到很理想的動態(tài)控制性能。
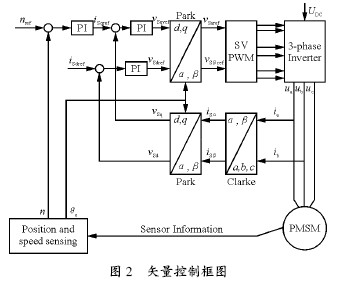
3.3 矢量控制
矢量控制框圖如圖2 所示。
1971 年,西門子工程師Balschke 首次提出矢量控制理論,使交流電機控制理論獲得了一次質的飛躍。其基本思想為:以轉子磁鏈旋轉空間矢量為參考坐標,將定子電流分解為相互正交的兩個分量,一個與磁鏈同方向,代表定子電流勵磁分量,另一個與磁鏈方向正交,代表定子電流轉矩分量,分別對它們進行控制,獲得像直流電動機一樣良好的動態(tài)特性。因其控制結構簡單,控制軟件實現(xiàn)較容易,已被廣泛應用到調速系統(tǒng)中。但矢量控制方法在實現(xiàn)時要進行復雜的坐標變換,并需準確觀測轉子磁鏈,而且對電機的參數(shù)依賴性很大,難以保證完全解耦,使控制效果大打折扣。
采用矢量控制理論進行控制時,具有和直流電動機類似的特性。矢量控制的優(yōu)點在于調速范圍寬,動態(tài)性能較好。不足之處是按轉子磁鏈定向會受電動機參數(shù)變化的影響而失真,從而降低了系統(tǒng)的調速性能。解決方法是采用智能化調節(jié)器可以提高系統(tǒng)的調速性能和魯棒性。
文獻[20]和文獻[21]采用PI 控制,文獻[20]中電流環(huán)、速度環(huán)均采用PI 調節(jié),由仿真結果得出:PI 控制器的參數(shù)對系統(tǒng)的性能有極大的影響,永磁同步電機是一個具有強耦合的非線性對象,很難用精確的數(shù)學模型描述,而PI 控制器是一種線性控制器,魯棒性不夠強,所以,在調速系統(tǒng)中難以達到令人滿意的調速性能,尤其是在對系統(tǒng)性能和控制精度要求較高的場合,這就需要對PI 算法進行改進,以達到更好的控制性能。文獻[21]通過多次仿真,在速度調節(jié)中只單純采用PI 調節(jié)效果并不理想,為此,提出了采用分段PI 速度調節(jié)的方法,即根據(jù)誤差量的大小分段確定參數(shù)Kp,Ki。在初期,可加大比例調節(jié)成分,隨著誤差減小適當加大積分系數(shù),這樣系統(tǒng)能較好地實現(xiàn)永磁同步電機的調速及其正反轉控制。
文獻[1]對PMSM的電壓空間矢量的弱磁控制方面所做的研究,提出一種基于空間矢量PWM(SVPWM)的PMSM 定子磁鏈弱磁控制方法,在電機轉速達到基本轉速之前采用最大轉矩/電流策略控制,超過基本轉速之后采用弱磁擴速的電流控制策略,使電機具有更大的調速空間,該策略可實現(xiàn)電壓矢量近似連續(xù)調節(jié),同傳統(tǒng)的有限的離散空間矢量相比,有效減小了PMSM的轉矩脈動,提高了系統(tǒng)的性能。
3.4 直接轉矩控制
直接轉矩控制(DTC)框圖如圖3 所示。
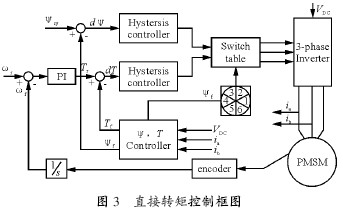
1985 年,Depenbrock 教授提出的高性能交流電機控制策略,摒棄了矢量控制的解耦思想,不需要將交流電動機與直流電動機作等效與轉化,省去了復雜的坐標變換;采用定子磁場定向,實現(xiàn)了在定子坐標系內對電動機磁鏈、轉矩的直接觀察、控制,定子磁鏈的估計僅涉及定子電阻,減弱了對電機參數(shù)的依賴性,很大程度上克服了矢量控制的缺點。且控制簡單,轉矩響應快,動態(tài)性能好。開始時是使用于異步電機控制中,后來逐步引用于同步電機中。1997 年,L.zhong,M.F.Rahman 和Y.W.Hu 等人把直接轉矩控制與永磁同步電機結合起來,提出了基于永磁同步電機的直接轉矩控制理論,實現(xiàn)了永磁同步電機直接轉矩控制方案,并且成功地拓展到了弱磁恒功率范圍,取得了一系列成果。
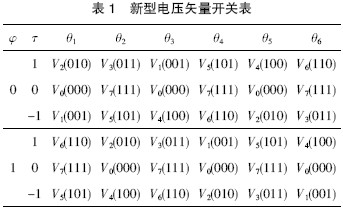
直接轉矩控制技術是繼矢量控制后發(fā)展起來的,最早應用在感應電機中,隨后應用到永磁同步電動機控制系統(tǒng)中。永磁同步電動機不能像異步電機那樣用零電壓矢量降低轉矩,而采用反向電壓減小轉矩,這樣會產(chǎn)生較大的轉矩波動。文獻[2]分析了零電壓矢量在異步電機和同步電機中的不同作用,構造了一種應用零電壓矢量來減小轉矩的新型電壓矢量開關表,如表1 所列,可以改善轉矩脈動和系統(tǒng)性能。文獻[11]也構造了一種新型的含零電壓矢量的控制開關表,改變了傳統(tǒng)的控制系統(tǒng)。并通過仿真結果表明,正確地使用零電壓矢量能夠有效減少轉矩脈動,改善系統(tǒng)性能。直接轉矩控制的系統(tǒng)能以較大的轉矩啟動,并且含零電壓矢量的系統(tǒng)的轉矩平穩(wěn)性較好,轉矩波動比較小,并且在擾動后能在較短的時間內恢復穩(wěn)定。
傳統(tǒng)DTC 采用的是按一定規(guī)則從預制的開關表中選取近似合適的電壓空間矢量對電機轉矩和磁鏈進行控制,由于所選的空間電壓矢量有限,不同程度地導致DTC 系統(tǒng)出現(xiàn)較大的磁鏈和轉矩脈動。文獻[3]介紹分析了SVM(空間矢量調制)是在一個控制周期內,通過相鄰基本電壓矢量和零矢量合成,得到所需的任意電壓矢量,實現(xiàn)電壓矢量的線性連續(xù)可調。SVM DTC 控制可在不改變系統(tǒng)硬件結構的條件下,獲得更多的連續(xù)變化的電壓空間矢量,進而實現(xiàn)對電機磁鏈和轉矩更精確的控制,從而降低轉矩脈動。
在改進PMSM 控制方法和性能上,文獻[4]和文獻[5]提出了新的方法,文獻[4]在矢量控制策略基礎上提出了一種高精度混合控制方法,綜合利用自控方式與他控方式各自的優(yōu)點,在動態(tài)情況下,采用自控方式對控制系統(tǒng)輸出電壓進行快速調節(jié),提高系統(tǒng)動態(tài)響應能力以及增強系統(tǒng)穩(wěn)定性,當電機進入穩(wěn)態(tài)運行時切換到他控方式,從而提高電機穩(wěn)態(tài)性能指標,減小轉速波動和轉矩脈動,兼顧調速系統(tǒng)動態(tài)性能和穩(wěn)態(tài)性能,取得了更好的控制效果。文獻[4]還對目前永磁同步電動機控制系統(tǒng)轉子初始位置檢測方法進行了分析與對比研究,給出基于漸變電壓矢量法的轉子初始位置檢測簡單有效的檢測方法,主要是因為當給定電壓矢量接近永磁體轉子軸線時,可能會出現(xiàn)方向判斷失誤的情況。可以采用表決機制,多次測量后確定檢測結果,以保證結果的正確性和更高的檢測精度。并將模糊控制、神經(jīng)網(wǎng)絡控制與傳統(tǒng)的PID控制器結合,使系統(tǒng)有更好的動、靜態(tài)特性。
文獻[5]從開關頻率優(yōu)化和電壓空間矢量合理選擇兩個方面提出了一種新的轉矩調節(jié)方法,即通過逆變器開關頻率PI 調節(jié)得到轉矩滯環(huán)比較器的滯環(huán)寬度值。這樣在充分利用功率器件開關頻率的同時不僅克服了圓形磁鏈軌跡對功率器件高開關頻率要求的缺陷,而且克服了在轉速變化過程中采用固定滯環(huán)寬度值帶來的功率器件開關頻率波動范圍大及由此造成低速轉矩調節(jié)性能下降的缺陷。
文獻[12]對永磁同步電機直接轉矩控制中磁鏈觀測這一關鍵技術進行了研究,設計了一種新型磁鏈觀測器———非線性正交反饋補償磁鏈觀測器。磁鏈觀測是直接轉矩控制技術中關鍵部分,直接關系到電機的運行性能和直接轉矩控制方案效果,適合永磁同步電機直接轉矩控制應用的新型非線性正交反饋補償磁鏈觀測器算法可以用式(1)表示。

通過仿真,采用的基于非線性正交反饋補償?shù)拇沛溣^測器不僅能在高速下準確觀測磁鏈,而且能有效地解決傳統(tǒng)電壓積分方法在低速時的不足和弊端,從而驗證了基于非線性正交反饋補償?shù)拇沛溣^測器在理論上的可行性。系統(tǒng)的動態(tài)響應快,穩(wěn)態(tài)運行平穩(wěn),電流正弦,磁鏈能夠運行在圓形軌跡上。

3.5 基于無傳感器控制
通常,高性能的調速系統(tǒng)離不開閉環(huán)控制,但速度傳感器的安裝帶來了系統(tǒng)成本增加、體積增大、可靠性降低等問題。因此無速度傳感器控制技術成為研究熱點,其核心是如何準確獲取電機的轉速信息。
文獻[14]指出,代表性的方案有:瞬時轉速估計法,PI 控制器法,模型參考自適應系統(tǒng)法,擴展卡曼濾波法,基于神經(jīng)網(wǎng)絡的方法。
文獻[6]提出了在無位置傳感器的條件下檢測轉子初始位置的方法,適用于凸極和隱極同步電動機,受電動機參數(shù)影響比較小,在靜止、低速、高速范圍內均可以估計出轉子的實際位置,通過向電動機的定子繞組施加高頻檢測電壓,利用空間凸極效應即可確定轉子的初始位置。
文獻[15]指出,早先的無傳感器控制方法主要集中在高速條件下,有:磁鏈位置估算法,特點是簡單而易于實現(xiàn),但算法性能取決于電壓、電流的測量精度及電機參數(shù)準確性;擴展卡曼濾波法,可以直接獲得定子磁鏈矢量和轉子位置的估計值,能很好地抑制測量和擾動噪聲,但算法對電機參數(shù)有較強的依賴性,同時卡爾曼增益也很難確定。
文獻[15]針對表貼式永磁同步電動機,在任意同步旋轉坐標系上利用電機穩(wěn)態(tài)操作的結果估計反電動勢,進而實現(xiàn)了轉子位置和轉速的估計,采用的反電動勢常數(shù)補償算法,系統(tǒng)對反電勢參數(shù)的變化相當穩(wěn)健。該方法的位置和速度估計精度高,速度控制范圍寬。
文獻[13]介紹了針對內嵌式永磁同步電動機的凸極原理,并且基于這個原理介紹了一種根據(jù)輸入電壓檢測電流大小的方法,實現(xiàn)簡便,且沒有依賴電機參數(shù),建立數(shù)學模型或要進行復雜計算等缺點。僅需要在原有的電機驅動電路的基礎上增加一套針對初始磁極位置檢測的程序即可。整個程序分為三個部分:第一部分是測量并比較0毅和180毅電角度的電壓矢量,并選擇一個大的電壓矢量作為起始的角度;第二部分將整個電氣360毅周期分為12 個區(qū)域,每30毅一格,從0毅或者180毅開始,測量給定電壓矢量的電流,在保證測到最大電流時,減少測量的步數(shù),使得測量的時間也盡可能的縮短;第三步則是進一步細分角度,利用二分法來精確的檢測磁極位置的角度。這種方法實現(xiàn)起來簡便,無須預知電機的參數(shù),無須增加硬件設備,僅須在每次啟動電機時導入相應程序即可。
4 永磁同步電機未來研究熱點
1)在材料技術方面,隨著半導體技術的不斷進步,使永磁同步電機體積能夠再減小。
2)在電機控制方面,研究如何進一步提高無速度傳感器直接轉矩控制性能。
3)有無速度傳感器控制的速度辨識的研究、矢量控制的魯棒性研究,直接轉矩中電壓矢量選擇智能化的研究。
4)永磁同步電機控制系統(tǒng)穩(wěn)定性的問題,研究哪些因素對穩(wěn)定性有影響。
參考文獻:
[1] 冷再興. 永磁同步電動機弱磁調速控制[D].華中科技大學,2006.
[2] 張昱,張興. 永磁同步電機直接轉矩控制系統(tǒng)的改進[J].合肥工業(yè)大學學報,2007.
[3] 徐華中,劉鵬. 一種改進的永磁同步電機直接轉矩控制仿真[J].武漢理工大學學報,2008.
[4] 朱洪海. 永磁同步電動機控制系統(tǒng)及其控制方法研究[D].浙江大學,2006.
[5] 許峻峰. 提高永磁同步電動機調速系統(tǒng)性能方法研究[D].西南交通大學,2005.
[6] 郭熠. 永磁同步電動機轉子初始位置檢測方法[J].微電機,2004.
[7] J S Kim and S K Sul.New Stand-still Position de-tection Strategy for PMSM Drive without Rotational Transducer[J].Conf. record of IEEE,QPEC,1994:363-369.
[8] D W Chung,J Kang,S K Sul.Initial Rotor Position Detection of PMSM at Standstill without Protational Transducer [J]. Electric Machines And Drivers,1999. International Conference IEMD 99.9-12,1999,(5):785-787.
[9] P L Jansen,R D Lorenz.Transducerless Position andVelocity Estimationin Induction Machines and Salientac
Machines [J]. IEEE Transactions on Industry Applications,1993,31(2):240.
[10] Yuhong Z,Kenneth A. Adaptive Flux and Speed Estimation for Induction Motors[C]. Proceedings of American Control Conference, San Diego, California,1999,2521-2525.
[11] 徐生林,鄭敏,盧航遠,楊成忠.永磁同步電機直接轉矩控制的改進與仿真[J].機電工程,2009,26(2):38-41.
[12] 查焱,芮延年,孟淮玉,杜海軍.永磁同步電機直接轉矩控制的磁鏈觀測研究[J].江蘇電器,2008,5:10-11.
[13] 季榮斌,范啟富,朱武標.一種新型的永磁同步電機磁極位置檢測方法[J]. 蘭州工業(yè)高等專科學校學報,
2009,16(1):26-28.
[14] 駱再飛,蔣靜坪,許振偉.交流伺服系統(tǒng)及其先進控制策略綜述[J].機床與液壓,2002,6:7-10.
[15] 曾岳南,毛宗源,羅彬,暨棉浩.永磁同步電機無位置速度傳感器控制[J].電力電子技術,2006,40(4).
[16] 趙越嶺,王燕秋,王英麗.無速度傳感器直接轉矩控制系統(tǒng)的轉速估算方法綜述[J]. 遼寧工學院學報,
2003,23(6).
[17] Tajima Hetal. Speed Sensor-less Vector Control method for an Industry Drive System [J]. IEEE. PCC,Yoko-
Hama,1995: 1034-1039.
[18] 賈洪平,賀益康.永磁同步電機直接轉矩控制中零矢量的作用研究[J].電氣傳動,2006,36(4): 13-17.
[19] 郭緒猛,劉景林.永磁同步電機直接轉矩控制研究與仿真[J].微電機,2007,40(4): 12-14.
[20] 林輝,劉軍.基于矢量控制的永磁同步電機研究[J].電機設計,2009.
[21] 暨綿浩,曾岳南,曾建安,等.永磁同步電動機及其調速系統(tǒng)綜述和展望[J].電氣時代,2005,5: 20-23.
[22] 林立,黃聲華.基于矢量控制的高性能異步電機速度控制器的設計[J].電子技術應用,2006 (2): 102-105.
[23] Bouchikers,Capolinoga. Vector Control of a Permanent-Magnet Synchronous Motor Using AC-AC Matrix
Converter [J].IEEE Transactions on Power Electronics,1998,13 (6):1089-1099.
[24] 王春民,孫淑琴,安海忠,等.基于DSP永磁同步電動機矢量控制系統(tǒng)的設計[J].吉林大學學報:信息科學
版,2008,26 (4): 343-346.
[25] 林利華,胡育文.磁鏈觀測器的實現(xiàn)[J].電源世界,2004(4).
[26] 郭前崗,李耀華,孟彥京.現(xiàn)代交流傳動系統(tǒng)調速技術綜述[J].微計算機信息(測控自動化),2004,20(11).
[27] 李正熙,王占擴,楊立永.永磁同步電動機直接轉矩控制策略綜述[J].變頻器世界,2006.
[28] 謝運祥,盧柱強.基于MATLAB/Simulink 的永磁同步電機直接轉矩控制仿真建模[J]. 華南理工大學學報
(自然科學版),2004,32(1).
[29] 田淳,胡育文.永磁同步電機直接轉矩控制系統(tǒng)理論及控制方案的研究[J].電工技術學報,2002(2):8-11.
[30] 謝成祥.永磁同步電機直接轉矩控制系統(tǒng)的分析與仿真研究[J]. 華東船舶工業(yè)學院學報(自然科學版),
2004(6):39-43.