
摘 要: 在某雷達天線伺服系統(tǒng)的設計中應用了ZSZ系統(tǒng)軸角編碼器,解決了ZSZ軸角編碼器模擬速度量的微弱信號處理問題和數(shù)字化軸角編碼器的信號采集和遠距離傳輸問題。
關鍵詞: ZSZ軸角編碼器 伺服系統(tǒng) 模擬速度量 傳輸
在雷達、火控、導彈發(fā)射架等需要實現(xiàn)角位置閉環(huán)控制的伺服系統(tǒng)中,完成角位置測量是實現(xiàn)閉環(huán)控制的先決條件,在以前的伺服系統(tǒng)中通常應用同步機加相敏檢波實現(xiàn)角誤差測量,系統(tǒng)笨拙,不易實現(xiàn)數(shù)字化控制。近年來單片機技術在交、直流伺服系統(tǒng)設計中得到廣泛應用,伺服系統(tǒng)的數(shù)字化已成為伺服系統(tǒng)設計的主流,為此,與之相配置的數(shù)字化軸角編碼器裝置得到迅速發(fā)展。數(shù)字化軸角編碼器和同步發(fā)送機配合使用可以方便地完成角位置信息的數(shù)字化測量,從而用單片機控制可以方便地實現(xiàn)數(shù)字位置跟蹤[1],由于它使用方便,可靠性極高,對使用環(huán)境無特殊要求,因此應用前景廣闊。特別是在軍事裝備中更是如此。目前已有ZSZ系列國產化數(shù)字軸角編碼器產品。
在交、直流伺服系統(tǒng)設計中,通常需要設置位置閉環(huán)和速度內閉環(huán),用位置環(huán)保證跟蹤精度,速度環(huán)保證跟蹤的快速性,因此在需要角位置反饋信號的同時還需要角速度反饋信號。ZSZ系列軸角編碼器自身正好有一路與系統(tǒng)轉速成正比的模擬速度信號輸出,但是對低轉速伺服系統(tǒng),模擬速度反饋信號的輸出很低。為了實現(xiàn)和速度給定量的匹配,必須對此信號放大,由于這一信號受到系統(tǒng)信號的干擾,簡單的放大處理將帶來速度閉環(huán)不穩(wěn)定,使這一功能應用受到限制。在文獻[2]的雷達伺服系統(tǒng)設計中就在使用ZSZ編碼器構成數(shù)字位置反饋信號的同時又在系統(tǒng)中配置了單獨的測速發(fā)電機實現(xiàn)速度閉環(huán),增加了系統(tǒng)成本和復雜性。本文給出了對ZSZ模擬速度反饋信號的處理方法,并成功應用于某雷達伺服系統(tǒng)的設計。
由于系統(tǒng)設計的需要,有時用于角位置數(shù)字化的ZSZ軸角編碼器和角位置信息處理的單片機之間傳輸距離較遠,需要對并行輸出的角位置信息實現(xiàn)正確采集和傳輸。本文也給出了相應設計方法,并成功應用于系統(tǒng)設計。
下面以ZSZ759數(shù)字化軸角編碼器在某雷達伺服系統(tǒng)設計中的應用為例予以說明。
1 ZSZ數(shù)字化軸角編碼器模擬速度反饋信號的處理方法
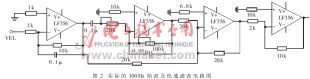
12ZSZ759的模擬速度量輸出對應編碼器最高跟蹤速度5r/s的輸出值是10V[3],而雷達天線的最高允許轉速一般為6r/min=0.1r/s,對應此最高轉速,模擬速度量最大輸出電壓=10V/5(r/s)×0.1(r/s)=0.2V,故VEL的輸出范圍是0~0.2V,屬弱信號范疇,模擬速度環(huán)構成速度反饋要求電壓范圍是-10V~+10V(負值對應反轉),因此VEL信號需放大50倍,然而,實測VEL信號受到VCO高頻開關信號和100Hz電源信號(50Hz整流)的干擾,因此這里的信號放大電路不能僅用比例放大器完成。高頻開關信號易于用低通濾波器和電源去耦濾除,而100Hz信號處于速度閉環(huán)通帶內,必須用陷波電路濾除。實踐證明,用雙“T”型陷波濾波器效果較差,影響閉環(huán)穩(wěn)定性。利用文獻[4]的方法設計了一種實用的陷波電路。較好地解決了100Hz信號濾波問題,此陷波電路的原理如圖1所示。


把(3)和(4)代入(2)式,得
R=15.9kΩ,C=0.1μs
R1=31.8kΩ,C=0.05μF
最后得出速度反饋放大電路如圖2所示。
圖3(a)直流電機電樞電流波形,圖3(b)是速度閉環(huán)實測濾波后的速度反饋值從電機啟動階段到穩(wěn)定運行階段的波形,由圖可見100Hz信號分量得到了有效的抑制,系統(tǒng)穩(wěn)定運行后轉速運行平穩(wěn)。

2 ZSZ軸角編碼器數(shù)字位置信號的采集和遠距離傳輸
由于數(shù)字化軸角編碼器與單片機之間有一定的傳輸距離(一般>5m),因此,在單片機獲取數(shù)據(jù)信息之前需要將軸角編碼器輸出的角位置信息進行調制、解調處理。8098為準16位單片機,只有8位數(shù)據(jù)線,而12ZSZ759角位置數(shù)據(jù)為12位并行輸出的,對數(shù)據(jù)的采集要用分時讀取的方式。當單片機的工作頻率fOC=6MHz時,系統(tǒng)的狀態(tài)周期T=500ns,而調制解調芯片1488、1489的最高工作頻率只有1MHz,滿足不了單片機讀、寫周期的時序要求,因此,要采集到正確的角位置信息,必須先把12ZSZ759并行輸出的12位角位置數(shù)字信號直接先進行調制傳輸,解調處理后,再由譯碼電路進行時序控制,讓單片機分時讀取。如果在調制前進行分時控制,單片機將采集不到正確的角位置數(shù)據(jù)信號。
12ZSZ759軸角編碼轉換器模塊內部沒有數(shù)據(jù)鎖存電路,為了實現(xiàn)數(shù)據(jù)實時準確采集,與單片機接口時,還需外加數(shù)據(jù)鎖存電路。12ZSZ759模塊有一“忙”信號輸出端BUSY,當輸入模擬信號變化一個轉換器最低有效位對應的電量時,該端就輸出一個約定2.5μs寬的脈沖,該信號為計算機檢測轉換器狀態(tài)提供了極大的方便。當BUSY為高電平時,表示轉換器內部正處于跟蹤狀態(tài),此時的數(shù)據(jù)輸出代碼D0~D11為非有效數(shù)碼,單片機不應采集此時的數(shù)據(jù);當BUSY為低電平時,表示轉換器內部已轉換結束,此時數(shù)據(jù)輸出端的數(shù)據(jù)有效,可以讀取。但由于可逆計數(shù)器的輸出數(shù)碼D0~D11是一位一位的逐步刷新,因此在數(shù)碼轉換過程中存在著過渡數(shù)碼。從數(shù)據(jù)最低位D0至最高位D11傳遞需要一定的轉換時間,大約為2μs。因而單片機8098應在BUSY脈沖信號高電平變至零電平后2μs再讀取數(shù)據(jù)。8098單片機與12ZSZ759的接口電路如圖4所示。
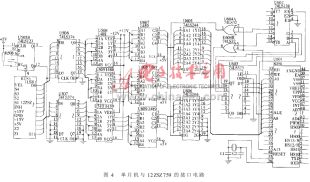
圖中,單穩(wěn)觸發(fā)器74LS123產生滯后于BUSY脈沖2μs的負脈沖,在負脈沖的上升沿將轉換器有效轉換數(shù)碼傳至數(shù)據(jù)緩沖鎖存器74LS374的緩沖器中。數(shù)據(jù)經調制、解調處理后,由8098單片機控制時序電路,采取分時讀取的方式將數(shù)據(jù)取走。
總之,由于采用了數(shù)字化的軸角編碼器,系統(tǒng)可靠性高,使得裝備伺服系統(tǒng)的數(shù)字位置伺服控制易于實現(xiàn),特別適用于有同步機的現(xiàn)有系統(tǒng)的數(shù)字化改造,因此,應用前景十分廣闊。以上電路均已調試通過,且系統(tǒng)已投入使用。
參考文獻
1 盧飛星等.單片微機控制雷達天線控制系統(tǒng)的設計.現(xiàn)代雷達,1999;21(4)
2 王廣明等.單片機控制的測雨雷達數(shù)字直流伺服系統(tǒng)的設計.火控雷達技術,1998;27(1)
3 中船七一六所編.ZSZ系統(tǒng)軸角編碼器產品說明書.連云港,1996
4 袁南兒等.計算機測控系統(tǒng)中模擬陷波器的特性和設計.電氣傳動,1996;25(5)