
1 引言
LED(Light-Emitting-Diode中文意思為發(fā)光二極管)是一種能夠?qū)㈦娔苻D(zhuǎn)化為光能的半導體,它改變了白熾燈鎢絲發(fā)光與節(jié)能燈三基色粉發(fā)光的原理,而采用電場發(fā)光。據(jù)分析,LED的特點非常明顯,壽命長、光效高、無輻射與低功耗。LED的光譜幾乎全部集中于可見光頻段,其發(fā)光效率可超過150lm/W.
然而由于LED出射光范圍大,單位光學擴展量所具有的光能與傳統(tǒng)光源相比較低,直接采用LED照明在大多數(shù)情況下難以滿足照明燈具和器件所需要達到的性能指標,因此對以LED為光源的照明系統(tǒng)進行二次光學設(shè)計是十分必要的。
照明系統(tǒng)一般分為反射型、折射型、全內(nèi)反射和復合型。LED出射光范圍大,反射型或折射型照明系統(tǒng)很難有效地調(diào)整LED的全部出射光,而復合型照明系統(tǒng)往往不緊湊。TIR利用折射和全內(nèi)反射,可以有效地收集和調(diào)整LED大范圍的出射光,并保證照明系統(tǒng)緊湊。本文首先根據(jù)同步多曲面方法及光學擴展量守恒定律設(shè)計了一種能有效收集和調(diào)整LED出光的定向投射器;然后通過一個具體的實例,對該種投射器的結(jié)構(gòu)及光學特性進行分析和研究。
2 光學擴展量
光學擴展量描述了光學系統(tǒng)傳輸光能的能力,光束的光學擴展量等于光束在其角度和位置區(qū)域內(nèi)的積。在三維坐標z等于常數(shù)的平面內(nèi),光束的光學擴展量可表示成:

式中P=nL,q=nM,其中咒為光束所在介質(zhì)的折射率,L和M為光線的方向余弦。
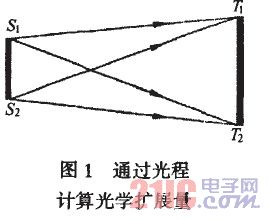
圖1中,從光源S1S2出射并入射到目標T1T2上的光學擴展量為:

式中S1T2和S1T1表示光程。對應(yīng)三維下的光學擴展量為:

光束經(jīng)理想光學系統(tǒng)作用后,其光學擴展量不變,系統(tǒng)所接收的光束將全部傳輸至目標面。
3 同步多曲面方法
一般情況下,對于給定的兩組光束來說,存在兩個曲面,使入射光束經(jīng)偏折后成對應(yīng)的出射光束。在二維下,可利用同步多曲面方法求解由這兩個曲面對應(yīng)的輪廓曲線。所謂同步多曲面方法舊J,是指所有待求曲面的求解過程是同步進行的,其中一個待求曲面的求解結(jié)束意味著其余待求曲面的求解結(jié)束。同步多曲面方法通過逐點求解的方式求解輪廓曲線的點,其中一條輪廓曲線上的一點可以通過另一條輪廓曲線上的已求點求得,如此反復便可同時求得兩條輪廓曲線。
現(xiàn)對光源出射光的定向控制為例來闡述同步多曲面方法,如圖2所示。
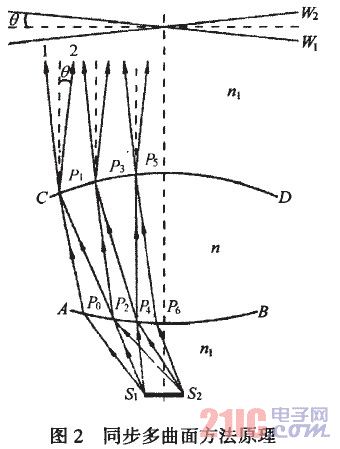
曲線AB和曲線CD分別為曲面AB和曲面CD的輪廓曲線,介質(zhì)n和介質(zhì)n1,為兩種不同的介質(zhì)。點S1和點S2為光源S1 S2的兩個邊緣點,由點S1和點S2出射的光束經(jīng)曲線AB和曲線CD折射后分別對應(yīng)波前w1和波前w2。已知其中一條曲線上的一點和曲線在該點的法線(如點Po和曲線AB在點Po處的法線),以及點Sl(點S2)到波前Wl(波前W2)的光程Z。
邊緣光線S1Po經(jīng)曲線AB折射后,折射光線為PoPl,根據(jù)已知條件可求得點P及曲線CD在點P1的法線。邊緣光線S2P2經(jīng)曲線AB折射后,折射光線為P2P1,根據(jù)已求點P1、曲線CD在點P1的法線以及光程可求得點P2及曲線AB在點P2的法線。
如此反復,便可同時求得曲線AB和曲線CD的點,然后擬合已求點可得曲線AB和曲線CD。
在利用同步多曲面方法求解輪廓曲線時,應(yīng)考慮光源的所有邊緣光線,并要求輪廓曲線上除端點之外的每個點僅有兩條邊緣光線通過。圖2中,光線1和光線2分別對應(yīng)邊緣光線S2P2和邊緣光線S1 Po。根據(jù)邊緣光線原理,位于邊緣光線S1 Po和邊緣光線S2P2之間的所有光源的出射光,經(jīng)曲線AB和曲線CD折射后將分布于光線1和光線2之間。
因此,利用同步多曲面方法設(shè)計的光學系統(tǒng)能有效收集和調(diào)整擴展光源的出射光。
4 照明系統(tǒng)設(shè)計
本文旨在設(shè)計一種定向投射器,該種投射器能有效收集大功率LED的出射光,并使收集的LED出射光經(jīng)投射器作用后分布在光軸兩側(cè)預定的光分布范圍內(nèi)。
圖3為投射器示意圖。為方便設(shè)計加工,曲面EC取為圓錐面,輪廓曲線EC斜率的選取應(yīng)保證經(jīng)曲面FM和曲面NQ全反射后的光線在曲面EC上不產(chǎn)生全反射。使曲面AB和曲面CD實現(xiàn)對光源小角度內(nèi)出光的收集和調(diào)整,使曲面AT、曲面FM、曲面TV及曲面NQ實現(xiàn)對光源大角度內(nèi)出光的收集和調(diào)整。已知光源出光的光學擴展量為E,根據(jù)光學擴展量守恒定律及式(1)可得:

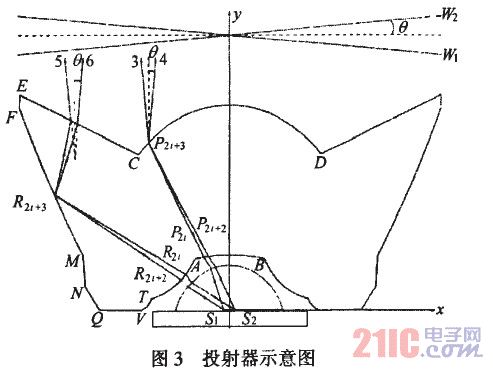
式中:汐為預定的光分布角度,即所要求的經(jīng)投射器作用后的出射光與光軸的最大夾角,如圖3所示;S為投射器出光口處波前分別為w1和W2的所有光線組(如圖中的光線3和光線4、光線5和光線6等)的交點在垂直于光軸的平面內(nèi)形成的投影面積。
由上式可求得該投影面積為:

由式5和圖3可知,角度日決定投影面積S,進而決定投射器的出光口半徑。
該投射器的設(shè)計方法:首先根據(jù)大功率LED的出光分布及預定的光分布角度口,結(jié)合光學擴展量守恒定律及邊緣光線原理,利用同步多曲面方法求解AB、CD、AT、FM、TV及NQ上的點;然后擬合已求點得到相應(yīng)的曲線。
4.1 折射面到折射面的設(shè)計
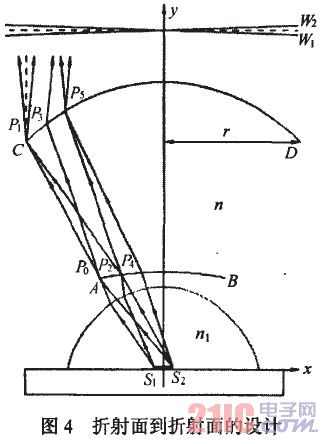
入射到曲面AB上的從光源小角度內(nèi)的出光,經(jīng)曲面AB和曲面CD折射后成滿足預定角度范圍的光分布,曲面AB和曲面CD的設(shè)計過程如圖4所示。初始條件是起始點P0、點P1的縱圖4折射面到折射面的設(shè)計坐標、波前w1和波前w2。
考慮到投射器的緊湊,在選取點Po時應(yīng)參考光源的外形尺寸。根據(jù)點P0,由式(2)可求得二維下由芯片出射入射到曲線AB的光束的光學擴展量:

根據(jù)光學擴展量守恒定律以及預定的光分布角度臼,可求得由曲線CD對應(yīng)的出光口半徑:

為實現(xiàn)對所有入射到曲線AB上的光束的有效收集和調(diào)整,要求邊緣光線S2Po經(jīng)曲線AB折射后入射到曲線CD上的點P1再經(jīng)曲線CD折射成波前為wl的出射光;邊緣光線S1Po經(jīng)曲線AB折射后人射到曲線CD上的點P3再經(jīng)曲線CD折射成波前為w1的出射光;邊緣光線S2P2經(jīng)曲線AB折射后入射到曲線CD上的點P1再經(jīng)曲線CD折射成波前為%的出射光。
由上述要求可知,曲線段P1P3及曲線段PoP2均為笛卡爾卵圓。根據(jù)費馬原理和折射定律可求得曲線段P1P3和曲線段PoP2上的點,以及曲線在各已求點處的法線。利用點P3可求得邊緣點S1到波前w1的光程Z。之后,利用同步多曲面方法求解曲線CD和曲線AB除笛卡兒卵圓之外的部分。在求得曲線AB及曲線CD位于光軸左側(cè)的點后,由對稱性可得已求點關(guān)于光軸的對稱點。分別擬合曲線AB及曲線CD上的已求點,可得曲線AB及曲線CD。
4.2 折射面一全反射面設(shè)計
在該投射器內(nèi)有兩組曲面對在光源大角度內(nèi)的出射光進行收集和調(diào)整,第一組為曲面AT和曲面FM,第二組為曲面TV和曲面NQ。
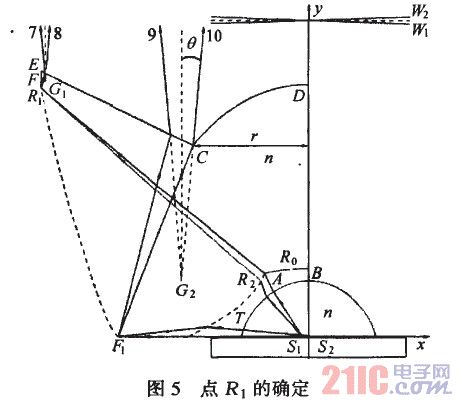
先求解第一組曲面。初始條件是點R。和點R1。點R1的確定如圖5所示。光線SlRo經(jīng)折射后入射到點R 1,然后經(jīng)全反射和線段EC折射成光線8。與光線8對應(yīng)的是光線7,光線7和光線8的延長線相交于點G。光線S1 F1首先經(jīng)全反射后入射到線段EC的端點C,然后經(jīng)線段EC折射成光線10。
與光線10對應(yīng)的是光線9,光線9和光線10的延長線相交于點G2。
根據(jù)光學擴展量守恒定律,可求得從曲面EC出射的所有光線組的交點在垂直于光軸的平面內(nèi)形成的投影面積:

為使所有經(jīng)曲面FM和曲面NQ全反射后的光線均能從曲面EC出射,要求:

式中z1和z2分別為點G1和點G2的橫坐標。在選取點R1時,除了其橫坐標滿足上式外,該點應(yīng)位于直線EC的下方,且使曲線AT在點Ro處的法線與。27軸正向的夾角較大(一般在3rad左右)。該夾角越大,曲線A丁下降的趨勢越大,曲線AT在z軸上的投影長度越短,投射器越緊湊。在確定點R1并求得曲線AT在點Ro處的法線后,可進行曲面AT和曲面FM的求解,求解過程如圖6所示。
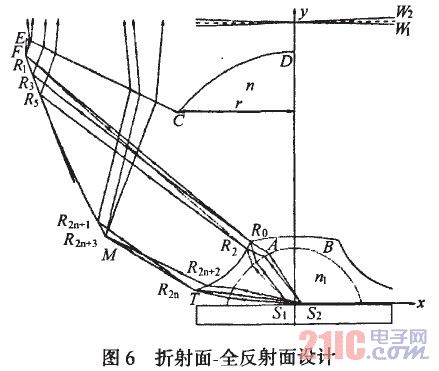
為實現(xiàn)對所有入射到曲線AT的光束的有效收集和調(diào)整,在曲線AT和曲線FM的起始端應(yīng)分別有笛卡爾卵圓曲線段R1R3和曲線段RoR2。曲線段尺1R3和曲線段RoR2的求解過程分別與圖3中的曲線段P1P3和曲線段PoP2的求解過程相同。
之后可利用同步多曲面方法和線性擴展法求解曲線FM和曲線AT除笛卡兒卵圓之外的部分。所謂線性擴展法,是指在求解曲線上某一點時,把該點的入射光線與曲線在上一點處的切線的交點定義為該點。如在確定點R5時,把直線R2R5與曲線FM在點R3處的切線的交點視為點R5。
考慮到投射器的緊湊,在求解曲線AT時,要求曲線AT在所有已求點處的法線與z軸正向的夾角口較大(一般α≥1.9rad)。在曲線AT上當已求點R2n處的α≥1.9tad,而在下一點處的α<1.9rad時,此時應(yīng)結(jié)束利用同步多曲面方法求解曲線AT,并在曲線AT和曲線FM的結(jié)束端各添加一段笛卡爾卵圓曲線段R2n+1尺2n+3和曲線段R2nR2n十2。分別擬合曲線AT和曲線FM上的已求點,可得曲線AT和曲線FM。
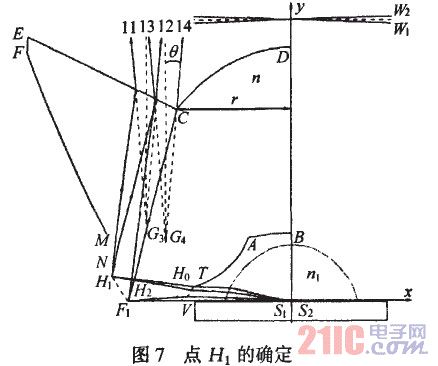
接下來求解第二組曲面。初始條件是點Ho和點H1。點H1的確定如圖7所示,點G3和點G4分別為光線11和光線12延長線的交點,以及光線13和光線14延長線的交點。
為使所有經(jīng)曲面NQ全反射后的光線從曲面EC出射,要求了

式中:z3和z4分別為點G3和點G4的橫坐標;S09為從曲面CD出射,由波前分別為w1和w2的所有光線組的交點在垂直于光軸的平面內(nèi)形成的投影面積;SrTw為經(jīng)曲面FM全反射后,由經(jīng)曲面EC折射成的波前為w1和Ⅳ:的所有光線組的交點在垂直于光軸平面內(nèi)形成的投影面積。在選取點H,時,要求點H1的橫坐標滿足上式且大于點M的橫坐標(便于加工時開模);點H,應(yīng)位于曲線FM的下方;曲線TV在點Ho處的法線與z軸正向的夾角較大(一般在3rad左右)。在確定點Hl并求得曲線T、,在點H0處的法線之后,可進行曲面TV和曲面NQ的求解。
曲線Ⅳ和曲線NQ的求解過程分別與曲面AT和曲面FM的求解過程相同。在求解曲線TV時,由于曲線Ⅳ在點H0處的法線與z軸正向的夾角較大,而點H0的縱坐標往往很小,因此在曲線TV的法線與X軸正向的夾角小于1.9rad之前,曲線TV和曲線NQ的求解便可完成。之后,分別擬合曲線NQ和曲線T、,上的已求點,得到曲線NQ和曲線Ⅳ。
為方便加工,用線段連接點E和點F,點E的橫坐標應(yīng)大于點F的橫坐標;用線段連接點M和點N。然后旋轉(zhuǎn)投射器的輪廓曲線,得到投射器三維模型,至此投射器設(shè)計完成。
5 設(shè)計實例與模擬分析
采用1×1㎡112的LED芯片作為光源,投射器所用材料選用有機玻璃(PMMA)。要求LED芯片的所有出射光經(jīng)投射器作用后分布在光軸兩側(cè)2。
的范圍內(nèi)。與芯片相對的內(nèi)折射曲面輪廓曲線的端點取為(一4,6)。
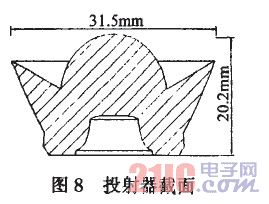
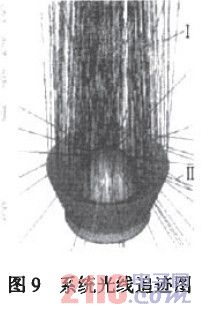
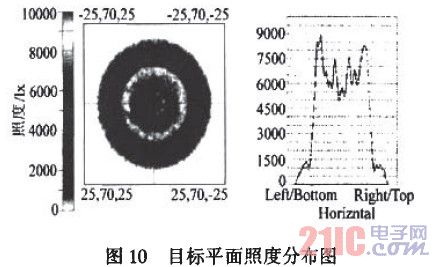
根據(jù)上述分析,將計算所得的各輪廓曲線上的點導人UG進行曲線擬合,然后將擬合生成的輪廓曲線繞光軸旋轉(zhuǎn)得到投射器的三維模圖8投射器截面型。圖8是該投射器的截面外形尺寸,透射器出光口直徑為31.5mm,高度為20.2mm。再將投射器的三維模型導入Tracepro,并對LED出射光進行光線追跡。圖9為系統(tǒng)的光線追跡圖,I類為LED出射光經(jīng)投射器作用后分布在預定的光分布范圍內(nèi)的光束,Ⅱ類為LED出射光經(jīng)各折射面菲涅爾反射形成的光束。圖10為距投射器頂部50mm處目標平面的照度分布圖。
模擬分析結(jié)果表明:
(1)系統(tǒng)結(jié)構(gòu)十分緊湊。
(2)系統(tǒng)的效率大于圖9系統(tǒng)光線追跡圖91%,光能損失主要是由各折射面的菲涅爾反射以及投射器所用材料對光能的吸收引起的。
(3)投射器有效地實現(xiàn)了對LED全部出射光的收集和定向控制。
6 結(jié)論
本文提出了一種實現(xiàn)對大功率LED出射光有效收集和定向控制的投射器設(shè)計方法。根據(jù)LED的出射光分布、預定的光分布范圍及光學擴展量守恒定律,利用同步多曲面方法求得各折射面和全反射面輪廓曲線上的點。在UG中首先對已求點進行曲線擬合,并通過旋轉(zhuǎn)擬合曲線得到投射器模型以及適合數(shù)控加工的面形數(shù)據(jù),然后再將該模型導入Tracepro光學設(shè)計專用軟件。對u、D出射光進行光線追跡,并對系統(tǒng)的效率進行了分析研究。用該種方法設(shè)計的定向投射器結(jié)構(gòu)緊湊、光能傳輸效率高,能有效收集和定向控制UD的全部出射光。