
1、引言
隨著生產(chǎn)規(guī)模的不斷擴(kuò)大,生產(chǎn)效率的不斷提高,起重機(jī)正在向大噸位、大跨度、高速度、高智能等方向發(fā)展,這就對(duì)起重機(jī)整體控制的安全性、可靠性、智能化等方面的要求也越來(lái)越高,特別是大跨度橋式、門(mén)式起重機(jī),由于跨度大、主梁剛度低,并且在實(shí)際工作中存在偏載或軌道出現(xiàn)偏差等諸多因素,使得大車(chē)在運(yùn)行過(guò)程中會(huì)產(chǎn)生不同步現(xiàn)象,對(duì)機(jī)械結(jié)構(gòu)等會(huì)造成很大的破壞,甚至?xí)斐蓢?yán)重事故。因此,探究不同步現(xiàn)象發(fā)生的原因并加以預(yù)防和消除具有十分重要的意義。
起重機(jī)運(yùn)行系統(tǒng)由變頻器和交流電動(dòng)機(jī)組成,作為整體控制對(duì)象,其傳遞函數(shù)為一階慣性環(huán)節(jié)。
在傳動(dòng)系統(tǒng)中電動(dòng)機(jī)軸上的轉(zhuǎn)矩平衡方程為

起重機(jī)本身質(zhì)量較大,大型門(mén)式起重機(jī)重量達(dá)數(shù)千噸。不同型號(hào)的起重機(jī)其運(yùn)動(dòng)參數(shù)也有很大的差別,系統(tǒng)的控制參數(shù)也不盡相同。在起重機(jī)的運(yùn)行過(guò)程中,由于負(fù)載不同,小車(chē)位置的不同等原因,造成車(chē)輪的輪壓是不確定的。另外還有風(fēng)阻、軌道的坡度、偏差等其他因素也會(huì)造成起重機(jī)傳動(dòng)系統(tǒng)的特性發(fā)生變化。因此起重機(jī)運(yùn)行機(jī)構(gòu)是一個(gè)大滯后、時(shí)變、非線(xiàn)性的系統(tǒng),隨著負(fù)荷變化或干擾因素影響,其對(duì)象特性參數(shù)和結(jié)構(gòu)發(fā)生變化。用準(zhǔn)確的數(shù)學(xué)解析式表示其特性十分困難。
隨著變頻技術(shù)的不斷成熟與廣泛應(yīng)用,起重機(jī)已越來(lái)越多的選用變頻調(diào)速的方案。使用變頻調(diào)速技術(shù)可以使大車(chē)運(yùn)行機(jī)構(gòu)具有較好的機(jī)械特性,良好的起、制動(dòng)性能,補(bǔ)償機(jī)械加工中的不足,使運(yùn)行更平穩(wěn),更可靠。
工程上常用的解決方法是采用PID控制的同步方案,在大車(chē)剛性腿側(cè)和柔性腿上安裝絕對(duì)值編碼器,由絕對(duì)值編碼器測(cè)量出剛性腿和柔性腿相對(duì)于標(biāo)準(zhǔn)位置的位移,傳送到PLC,PLC采用PID算法得出偏移,修正頻率指令發(fā)送給剛性腿和柔性腿的兩臺(tái)變頻器,變頻器在此頻率指令下調(diào)整柔性腿側(cè)的電機(jī)轉(zhuǎn)速,使柔性腿側(cè)電機(jī)降低行駛速度。從而達(dá)到大車(chē)同步的目的。
對(duì)于起重機(jī)同步系統(tǒng)這類(lèi)難以建立準(zhǔn)確的控制模型的被控對(duì)象,傳統(tǒng)PID控制器這種對(duì)控制參數(shù)比較敏感的線(xiàn)性控制器達(dá)不到很好的控制效果,最突出的一點(diǎn)就是有關(guān)PID參數(shù)的問(wèn)題,傳統(tǒng)PID無(wú)自適應(yīng)能力。這主要表現(xiàn)在三個(gè)方面:
(1) PID控制器的參數(shù)整定必須相對(duì)于某一模型己知、系統(tǒng)參數(shù)己知的系統(tǒng);在實(shí)際調(diào)試過(guò)程中,系統(tǒng)的控制參數(shù)調(diào)整比較困難,容易出現(xiàn)超調(diào)現(xiàn)象,導(dǎo)致運(yùn)行過(guò)程中出現(xiàn)扭擺、振蕩,運(yùn)行不平穩(wěn)。控制算法的隨意性比較大,系統(tǒng)的控制參數(shù)不能適應(yīng)不同水平剛性的起重機(jī)。
(2) PID控制器參數(shù)一旦整定完畢,便只能固定地適用于一種工況。但事實(shí)上大多數(shù)的生產(chǎn)過(guò)程都具有非線(xiàn)性,且其特性隨負(fù)載和時(shí)間的變化而變化。顯然固定的一組參數(shù)是不能滿(mǎn)足這種變化的。
(3) 傳統(tǒng)的PID控制器的參數(shù)只能整定為滿(mǎn)足生產(chǎn)過(guò)程控制目標(biāo)某一個(gè)方面的要求。在設(shè)計(jì)控制系統(tǒng)的過(guò)程中人們主要關(guān)心的問(wèn)題是“設(shè)定值跟蹤特性”和“干擾抑制特性”,而傳統(tǒng)的PID控制器,只能通過(guò)整定一組PID參數(shù)來(lái)滿(mǎn)足一個(gè)方面的要求。因此常常采用折中的辦法整定控制器參數(shù),這樣得到的控制效果顯然不是最佳的。
(4) 雖然現(xiàn)在一些改進(jìn)型數(shù)字PID控制器提高了系統(tǒng)的響應(yīng)速度、控制精度和控制效果,但是其控制器核心仍然要基于被控過(guò)程的精確數(shù)學(xué)模型。在精確數(shù)學(xué)模型難以得到或是被控過(guò)程具有高階、非線(xiàn)性等特性時(shí)控制效果有限。
2、常用方案分析
在一般的電力拖動(dòng)系統(tǒng)中,都要求系統(tǒng)運(yùn)行是剛性的,理想狀態(tài)是負(fù)載的變化不影響速度的變化。但由異步電機(jī)的特性可知,在電機(jī)的最大輸出轉(zhuǎn)矩以?xún)?nèi),負(fù)載的變化會(huì)影響電機(jī)的轉(zhuǎn)速,一般是負(fù)載越大,轉(zhuǎn)速降也越大。變頻器一拖二(以2臺(tái)電機(jī)為例),使2臺(tái)電動(dòng)機(jī)保持同步只能在理想情況下實(shí)現(xiàn)。因?yàn)閷?shí)際上,無(wú)法做到2臺(tái)電動(dòng)機(jī)的轉(zhuǎn)差率完全一致,即使是同一頻率電源,2臺(tái)電動(dòng)機(jī)的轉(zhuǎn)速也不完全一致。這就必須采用2臺(tái)變頻器來(lái)分別驅(qū)動(dòng),采用電動(dòng)機(jī)真實(shí)轉(zhuǎn)速反饋,兩臺(tái)變頻器之間相互通訊,并設(shè)置成同步運(yùn)行、一主一從模式。
工程上常用的同步方案有以下幾種:
一、 在兩臺(tái)電機(jī)軸上各接一個(gè)編碼器。然后把編碼器的信號(hào)接入各自控制的變頻器。通過(guò)變頻器自身的PID調(diào)節(jié)功能,調(diào)節(jié)各自電機(jī)的運(yùn)行速度。使各電機(jī)實(shí)際運(yùn)行速度趨向于一個(gè)理論的設(shè)定值。采用此方式來(lái)調(diào)節(jié)同步時(shí),調(diào)試,維護(hù)簡(jiǎn)單,但精度不高。有時(shí)還會(huì)出現(xiàn)危險(xiǎn)。抗干擾性差。安裝麻煩。
二、 在兩臺(tái)電機(jī)側(cè)各接一個(gè)編碼器,把編碼器的信號(hào)送入PLC的高速計(jì)數(shù)模塊。PLC讀取兩個(gè)編碼器的信號(hào)進(jìn)行比較。在PLC中通過(guò)編程方式實(shí)現(xiàn)PID算法。由PLC通過(guò)計(jì)算后分別控制兩臺(tái)變頻器的速度。來(lái)達(dá)到兩臺(tái)電機(jī)的速度同步。采用此方式若信號(hào)讀入無(wú)誤差,計(jì)算公式正確,程序編寫(xiě)準(zhǔn)確,可以達(dá)到電機(jī)的同步。但在實(shí)際操作中存在以下問(wèn)題:
(1) PID計(jì)算公式很難找準(zhǔn)確。
(2) 編碼器的信號(hào)容易受到干擾。
(3) 調(diào)試時(shí)間長(zhǎng)。(在調(diào)試過(guò)程中必須掌握整定開(kāi)始時(shí)間。每一次整定時(shí)如何保證運(yùn)行平穩(wěn)。)
(4) 維護(hù)比較困難。(存在大量的PLC計(jì)算,以及調(diào)試難度。)
(5) 成本較高(包括生產(chǎn)成本,維護(hù)成本。)
三、 在方式二的基礎(chǔ)上,在PLC中采用魯棒控制、模糊控制、自適應(yīng)控制等算法。由PLC通過(guò)計(jì)算后分別控制兩臺(tái)變頻器的速度。來(lái)達(dá)到兩臺(tái)電機(jī)的速度同步。采用此方式若信號(hào)讀入無(wú)誤差,計(jì)算公式正確,程序編寫(xiě)準(zhǔn)確,可以非常好的解決同步問(wèn)題。但在實(shí)際操作中存在以下問(wèn)題:
(1) 調(diào)試要求高。(掌握這些控制算法要求有很高的理論基礎(chǔ),普通調(diào)試人員很難勝任。)
(2) 調(diào)試時(shí)間長(zhǎng)。(在調(diào)試過(guò)程中必須在各種工況下反復(fù)運(yùn)行,從而得出合適的參數(shù)。)
(3) 維護(hù)難度大。(若現(xiàn)場(chǎng)設(shè)備需要調(diào)整,普通維護(hù)人員難以完成。)
四、 采用同步卡,同步卡是安裝在變頻器內(nèi)部的一塊高度集成的PCB板,裝有同步卡的變頻器便構(gòu)成了一臺(tái)可編程的伺服控制器。它內(nèi)置了魯棒控制等現(xiàn)代控制算法,用戶(hù)只需在變頻器上設(shè)置相應(yīng)的參數(shù)即可,同步控制可以在多臺(tái)驅(qū)動(dòng)器之間以主/從模式運(yùn)行。同步控制中主站負(fù)責(zé)通信和控制信號(hào)。可以通過(guò)內(nèi)置編程實(shí)現(xiàn)相應(yīng)控制功能。此方案具有以下特點(diǎn):
(1) 調(diào)試簡(jiǎn)便。(根據(jù)實(shí)際設(shè)備要求,設(shè)置相應(yīng)的參數(shù)即可。)
(2) 調(diào)試時(shí)間短。(設(shè)置相應(yīng)的參數(shù)即可取得很好的效果。)
(3) 維護(hù)方便。(若現(xiàn)場(chǎng)設(shè)備需要調(diào)整,普通維護(hù)人員也可設(shè)置參數(shù)。)
在工程實(shí)踐中,使用同步卡的方案以高性?xún)r(jià)比,調(diào)試、維護(hù)方便在同步控制中占據(jù)了極大的優(yōu)勢(shì)。
3、實(shí)際應(yīng)用
收獲變頻器是來(lái)自于韓國(guó)收獲電氣株式會(huì)社的一種高性能變頻器。收獲同步控制有近十年的生產(chǎn)應(yīng)用經(jīng)驗(yàn),技術(shù)成熟可靠,以在同類(lèi)應(yīng)用中廣泛使用,完全滿(mǎn)足起重機(jī)同步的技術(shù)要求,并提供可靠的后期維護(hù)和技術(shù)支持,所以我們選用該產(chǎn)品來(lái)實(shí)現(xiàn)同步功能。它具有
●多樣的控制方式:V/F控制、無(wú)感矢量控制(開(kāi)環(huán))、矢量控制(閉環(huán))。
●自由編程功能:多樣的數(shù)學(xué)方程式、多樣的邏輯運(yùn)行、多樣的計(jì)時(shí)運(yùn)行、實(shí)現(xiàn)任意的編程組合、定義明確的函數(shù)。
●多驅(qū)動(dòng)&多電機(jī)控制:多驅(qū)動(dòng)間的同步控制、PWM逆變?cè)偕鷨卧牟⒙?lián)運(yùn)行多電機(jī)控制。
SEOHO-VD系列變頻器配合使用的同步卡(Sychron-Card),無(wú)需編碼器就能實(shí)現(xiàn)高度精確穩(wěn)定的轉(zhuǎn)距、轉(zhuǎn)速控制,從而使廉價(jià)的變頻器應(yīng)用到同步控制系統(tǒng)中成為現(xiàn)實(shí),下面我們將通過(guò)一個(gè)實(shí)例來(lái)說(shuō)明SEOHO變頻器的多驅(qū)動(dòng)&多電機(jī)控制方式。
SEOHO變頻器控制主從電機(jī)是將多臺(tái)變頻器分別設(shè)為一臺(tái)主機(jī)和多臺(tái)從機(jī),通過(guò)主從變頻器間的相互通訊從而控制兩臺(tái)電機(jī)軸上的輸出轉(zhuǎn)矩和轉(zhuǎn)速同步。采用SEOHO變頻器的此功能來(lái)實(shí)現(xiàn)多臺(tái)電機(jī)之間實(shí)現(xiàn)同步轉(zhuǎn)速的方案,與傳統(tǒng)在電機(jī)上采用編碼器來(lái)實(shí)現(xiàn)同步轉(zhuǎn)速的功能的方案相比,有以下特點(diǎn):
(1) 成本低。(與通常的同步方案相比,無(wú)需編碼器即可滿(mǎn)足控制要求)。
(2) 控制精度高。
(3) 調(diào)試簡(jiǎn)單方便。
(4) 信號(hào)穩(wěn)定。(無(wú)需編碼器,則系統(tǒng)減少了一個(gè)干擾源。)
(5) 控制方式的多樣化。
主站負(fù)責(zé)通信和控制信號(hào)。RS-422作為同步控制的物理層,它允許總線(xiàn)中接入多臺(tái)驅(qū)動(dòng)設(shè)備。為了保證通信速度,主站到從站中只有單向的數(shù)據(jù)流動(dòng),從站只是單純的從總線(xiàn)中接收數(shù)據(jù)。也就是說(shuō),從站并沒(méi)有向主站發(fā)送數(shù)據(jù)。主站和從站之間的數(shù)據(jù),是隨著時(shí)鐘信號(hào)發(fā)送和接收的。這樣,就保證了較高的通信質(zhì)量。
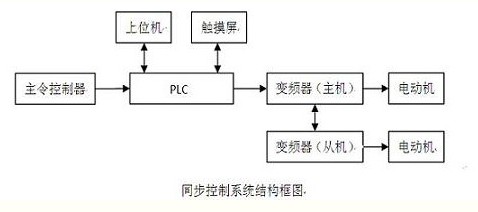
步控制系統(tǒng)結(jié)構(gòu)框圖
應(yīng)用實(shí)例:為威海榮成伽耶船廠做的一臺(tái)A型門(mén)機(jī)的大車(chē)控制系統(tǒng)。
此門(mén)機(jī)的跨度是52米,采用了四臺(tái)7.5KW的變頻電機(jī)。要求此門(mén)機(jī)有多檔速度,在每一檔速度四臺(tái)電機(jī)都必須同步運(yùn)行。設(shè)計(jì):采用了15KW的SEOHO變頻器2臺(tái)(型號(hào)為:SOHO15VD4Y,每臺(tái)驅(qū)動(dòng)2個(gè)7.5KW的電機(jī)),Option-Card卡(擴(kuò)展卡)2塊,Sychron-Card(同步卡)2塊。
雙絞線(xiàn)(8線(xiàn))作為RS422同步串行通信介質(zhì)。為了保證穩(wěn)定性,通信總線(xiàn)兩端必須添加終端端子。對(duì)于多臺(tái)驅(qū)動(dòng)器系統(tǒng),主站使用一個(gè)端子,最后一臺(tái)從站插入另外一個(gè)端子。在通信卡上有兩個(gè)連接插頭,一個(gè)用于連接雙絞線(xiàn),另一個(gè)用于連接終端端子(或者用于連接通向下一個(gè)驅(qū)動(dòng)器的雙絞線(xiàn))。具體接法見(jiàn)下圖。
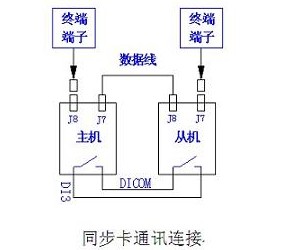
同步卡通訊連接
主站通過(guò)“二進(jìn)制輸入端”(DigitalInput)監(jiān)控從站RUN/STOP狀態(tài),并根據(jù)外部給定的參考值和RUN/STOP信號(hào)通過(guò)數(shù)據(jù)線(xiàn)將“速度”“轉(zhuǎn)矩”設(shè)定值和RUN/STOP信號(hào)發(fā)送給從站。傳送的消息(Messages)包括兩部分:一個(gè)是控制指令(controlmessage),另一個(gè)是回饋回來(lái)的信號(hào)。在每一個(gè)通訊周期中,主站都發(fā)出控制指令。從站依據(jù)主站發(fā)送來(lái)的指令值,執(zhí)行相應(yīng)的操作并從“二進(jìn)制輸出端”(DigitalOutputorRelayOutput)輸出RUN/STOP信號(hào)給主站的二進(jìn)制輸入端,主站收到此信號(hào)開(kāi)始運(yùn)轉(zhuǎn)。如果沒(méi)有檢測(cè)到從站處于運(yùn)行狀態(tài),主站將一直處于初始化運(yùn)行狀態(tài),不會(huì)進(jìn)行下一步的操作。例如,主站不會(huì)控制電機(jī)提高轉(zhuǎn)速。
在主,從運(yùn)行過(guò)程中,主站隨時(shí)監(jiān)控從站的運(yùn)行情況,若從站出線(xiàn)異常情況,主站會(huì)通過(guò)從站的數(shù)字量輸出信號(hào)接收到從站異常的信號(hào)。從而主站會(huì)控制整個(gè)系統(tǒng)停機(jī)并報(bào)警,當(dāng)主機(jī)出現(xiàn)故障時(shí)從機(jī)報(bào)故障(F39)。
調(diào)諧通過(guò)后設(shè)以下參數(shù):
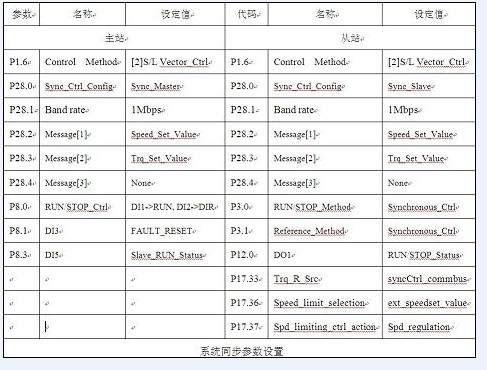
系統(tǒng)同步參數(shù)設(shè)置
此門(mén)機(jī)的大車(chē)運(yùn)行系統(tǒng)實(shí)現(xiàn)了交流變頻技術(shù)與PLC控制變頻器同步調(diào)速,實(shí)現(xiàn)了各主從單元同步的精確控制和主要工藝參數(shù)在線(xiàn)檢測(cè)與監(jiān)控,從調(diào)試完成運(yùn)行到現(xiàn)在,運(yùn)行情況穩(wěn)定。沒(méi)有出現(xiàn)任何異常情況。
通過(guò)這個(gè)實(shí)例可以看出。使用SEOHO變頻器來(lái)實(shí)現(xiàn)同步控制具有,控制方式簡(jiǎn)單(僅僅通過(guò)一根網(wǎng)線(xiàn)即可實(shí)現(xiàn)),操作方便(通過(guò)幾個(gè)簡(jiǎn)單的參數(shù)實(shí)現(xiàn))。運(yùn)行可靠(無(wú)干擾)。設(shè)備一體化程度高,控制多樣化等優(yōu)點(diǎn)。主站的控制通過(guò)現(xiàn)場(chǎng)總線(xiàn)來(lái)實(shí)現(xiàn),使各種信息指令可方便的通過(guò)總線(xiàn)反饋給PLC和觸摸屏等上位機(jī),實(shí)現(xiàn)自動(dòng)控制功能。也可通過(guò)繼電器電路來(lái)實(shí)現(xiàn),能滿(mǎn)足各種行業(yè)和各種控制方式的要求。
其他說(shuō)明
SEOHO變頻器的同步控制功能除了能用在運(yùn)行機(jī)構(gòu)上,亦能用在起重機(jī)的起升機(jī)構(gòu)以及起升抓斗控制上。(起升機(jī)構(gòu)上有很多時(shí)候是用兩臺(tái)電機(jī)控制,一臺(tái)電機(jī)控制一個(gè)吊鉤,要求雙鉤運(yùn)行時(shí)同步提升重物。抓斗控制要求抓斗的打開(kāi)和閉合同步)。對(duì)于主從機(jī)連接到單軸的設(shè)備,系統(tǒng)使用的元件,參數(shù)的調(diào)整都與大車(chē)同步控制的方案相同。
在很多應(yīng)用中,當(dāng)主站或者從站發(fā)生故障等緊急情況的時(shí)候,都要求主站、從站可以相互獨(dú)立的控制。可以通過(guò)“二進(jìn)制輸入端”(binaryinput)設(shè)定控制位“Sync_Ctrl_Bypass”。當(dāng)該位使能,同步控制則取消,主/從站之間相互獨(dú)立的運(yùn)行。輸入信號(hào)(RUN,Speed_Set,Trq_Set)由“數(shù)字輸入端子”(digitalinputterminals)接入。也可來(lái)自PROFIBUS總線(xiàn)。這樣,就可以方便的實(shí)現(xiàn)其他控制信號(hào)(Sync_Ctrl_Bypass,Trq_Ctrl_Option_Bypass)與輸入信號(hào)(RUN,Speed_Set,Trq_Set)共同對(duì)電機(jī)進(jìn)行控制。
當(dāng)控制位“Sync_Ctrl_Bypass”被設(shè)置后,從站將不再跟隨主站動(dòng)作。在這種情況下,我們可以使用自由功能模塊(freefunctionblock)解決。調(diào)用此自由功能模塊。輸出信號(hào)“RUN”,是控制信號(hào)“Sync_Ctrl_Bypass”與“Sync_Ctrl_RUN”或者DI1信號(hào)邏輯與運(yùn)算的結(jié)果(即:(!X&Y)|(X&Z))。同樣,速度和轉(zhuǎn)矩設(shè)定值也同樣設(shè)置。
4結(jié)束語(yǔ)
同步傳動(dòng)是起重機(jī)的基礎(chǔ)性技術(shù)。進(jìn)入變頻器傳動(dòng)時(shí)代以來(lái),同步傳動(dòng)問(wèn)題日益成為典型的變頻器應(yīng)用技術(shù)。收獲同步卡與SEOHO-VD在起重行業(yè)的廣泛應(yīng)用,顯示了收獲變頻器在推進(jìn)起重工業(yè)領(lǐng)域技術(shù)進(jìn)步的能力。
作者簡(jiǎn)介:
何小民男碩士畢業(yè)于太原科技大學(xué)電子信息工程學(xué)院控制理論與控制工程專(zhuān)業(yè)現(xiàn)在青島立邦達(dá)工控技術(shù)有限公司從事技術(shù)工作
參考文獻(xiàn)
【1】韓國(guó)SEOHO變頻器-同步控制功能說(shuō)明書(shū)
【2】SEOHO-VD變頻器同步控制功能起重機(jī)應(yīng)用實(shí)例教程