
1 引言
近年來,隨著電力電子設(shè)備及非線性、沖擊性設(shè)備的廣泛應(yīng)用。在電網(wǎng)中產(chǎn)生的諧波對電網(wǎng)系統(tǒng)造成了嚴(yán)重的污染,因此消除電網(wǎng)中的諧波污染已成為電能質(zhì)量研究的一個重要課題。目前普遍采用的并聯(lián)型無源濾波器存在著濾波效果差,對電網(wǎng)參數(shù)敏感。元件體積龐大。嚴(yán)重時會導(dǎo)致串并聯(lián)諧振事故等缺陷。采用現(xiàn)代電力電子技術(shù)、數(shù)字信號處理(DSP)技術(shù)和先進(jìn)控制理論的有源電力濾波器(APF)技術(shù)㈣對電網(wǎng)諧波進(jìn)行動態(tài)實時補償。是目前解決諧波污染問題最有效和最具潛力的途徑。
傳統(tǒng)的并聯(lián)型APF的控制方法大都基于瞬時無功理論、自適應(yīng)理論等計算測量方法,首先計算出負(fù)載電流中的諧波成分,然后根據(jù)計算出的諧波電流值。分別進(jìn)行補償電流和直流側(cè)電容電壓的控制。這種方式需進(jìn)行較復(fù)雜的數(shù)學(xué)運算,影響裝置的響應(yīng)速度。在負(fù)荷變化時容易發(fā)生電流畸變。
針對三相系統(tǒng)采用了一種基于直流側(cè)電容電壓控锘lJl51的APF控制算法,從瞬時有功和無功功率在系統(tǒng)中傳遞的角度出發(fā),以調(diào)節(jié)電網(wǎng)輸入APF的有功功率為目標(biāo),直接對輸入電流進(jìn)行控制,省去了檢測有功和無功電流分量的繁瑣過程,使檢測諧波的過程變得簡單。并設(shè)計了一種基于DSP和ARM的全數(shù)字并聯(lián)APF控制器。
2 控制策略
2.1 直流側(cè)電容電壓控制算法
通過控制算法使電源側(cè)向電容注入適當(dāng)?shù)哪芰浚匝a償電力電子器件開斷造成的損耗,維持直流側(cè)電容電壓H由的穩(wěn)定。實際補償裝置中的損耗功率在一個周期內(nèi)的積分不為零,會引起u也周期值的變化,該周期值的變化反應(yīng)了逆變器兩側(cè)有功功率的傳遞。
算法控制在交流側(cè)由電源輸入有功電流以補償開關(guān)器件的損耗。交流側(cè)補償功率PA一個周期內(nèi)的積分為:
在一個周期內(nèi)的能量變化即直流電容上儲存的電量可表示為:
![]()
聯(lián)立式(1)和式(2),補償目標(biāo)是使兩式相等。以一個r為單位。可以計算出交流側(cè)等效補償電流的大小。圖1示出據(jù)此設(shè)計的直流側(cè)電壓的單周期控制框圖。進(jìn)行周期采樣,通過比例積分環(huán)節(jié)對采樣得到的電壓比較值進(jìn)行修正之后,可以得出損耗電流的幅值k。使損耗電流與系統(tǒng)電壓同相位,以保證其為等效有功電流:控制有功的傳遞情況,以保證穩(wěn)定在某一值附近。
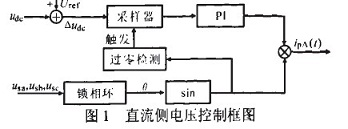
由圖1可以看出,u出的調(diào)節(jié)形成負(fù)反饋,滿足了出始終在某一固定值附近的要求。
2.2 諧波補償
對于某一穩(wěn)定諧波源,可通過在控制回路疊加諧波檢測環(huán)節(jié)來補償負(fù)荷的諧波,既可選擇全補償亦可選擇對特定諧波進(jìn)行補償。同時,在諧波檢測環(huán)節(jié)加限幅環(huán)節(jié)。以抵消負(fù)荷突變造成的影響,起到保護(hù)電路的作用。諧波電流的提取可按FFI'方法計算:

2.3 總控制框圖
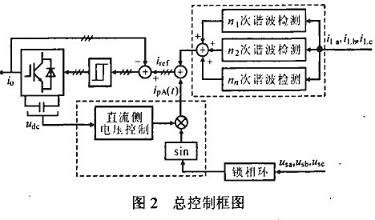
圖2示出總控制框圖。目標(biāo)電流輸出包括了控制和諧波電流檢測兩部分內(nèi)容。與補償器實際輸出的補償電流進(jìn)行滯環(huán)比較。輸出三相PWM信號去控制變流器。
3 有源電力濾波器控制系統(tǒng)設(shè)計
所設(shè)計的APF控制系統(tǒng)采用DSP+ARM雙核結(jié)構(gòu)。DSP完成采樣控制、A/D轉(zhuǎn)換、電壓調(diào)節(jié)和指令電流計算等功能,ARM實現(xiàn)外圍擴展功能。
采用近年新推出的一款32位定點數(shù)字信號處理器TMS320F2808。它具有豐富的片內(nèi)外圍設(shè)置:
兩個事件管理器模塊各包含兩個16位定時器。完成PWM信號產(chǎn)生、信號指示和故障保護(hù)功能;最小轉(zhuǎn)換時間為160 ns的12位ADC完成數(shù)據(jù)采集:CAN,SCI和SPI通信接口完成快速通信功能。其最高主頻為100 MHz.單個指令周期為10 ns.可以很好地滿足APF控制系統(tǒng)的控制要求。
采用LPC2364型ARM芯片。它基于一個支持實時仿真和嵌入式跟蹤的ARMTTDMI.STMCPU微控制器,功能強大且成本效率高。支持10/100 Ethernet、全速USB2.0和CAN2.0B.具有高達(dá)512 kB的FLASH和58 kB的SRAM.可以方便地實現(xiàn)液晶顯示器與鍵盤組成的人機接口。以及與上位機的通信功能。控制系統(tǒng)框圖如圖3所示。
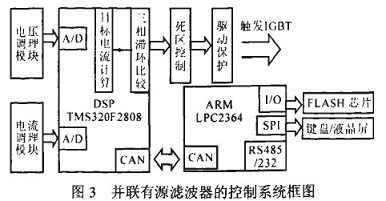
電網(wǎng)中的三相電壓信號、直流側(cè)電壓信號、負(fù)載電流信號以及APF輸出信號經(jīng)過信號調(diào)理后送往DSP進(jìn)行轉(zhuǎn)換。DSP內(nèi)置A/D模塊具有12位分辨率、流水線結(jié)構(gòu)。根據(jù)所采樣的數(shù)據(jù),TMS320F2808運算得到的如與APF實際輸出的補償電流進(jìn)行滯環(huán)比較。輸出三相PWM信號控制變流器。同時,采用邏輯器件組成了硬件死區(qū)控制方式,配合IGBT模塊設(shè)計了相應(yīng)的邏輯硬件驅(qū)動保護(hù)。以提高系統(tǒng)的可靠性。
DSP與ARM之間采用CAN通信方式,通信速度可達(dá)l Mb/s。能很好地滿足高速傳輸數(shù)據(jù)的要求。
ARM通過CAN總線調(diào)用刖D數(shù)據(jù)并擴展FLASH芯片用于存儲數(shù)據(jù)。芯片采用I/O模式的16 MB容量FLASH。板內(nèi)可擴展8塊。利用三八譯碼器的輸出作為選通信號。主要用于儲存液晶屏顯示數(shù)據(jù):ARM芯片采用標(biāo)準(zhǔn)SPI接口。與顯示板交互數(shù)據(jù):帶有標(biāo)準(zhǔn)的232/485接口。用于上位機通訊及通訊口功能的擴展。如打印機等。
系統(tǒng)程序由主程序和定時器上溢中斷程序組成。
主程序負(fù)責(zé)DSP系統(tǒng)初始化和變量初始化。完成對三相系統(tǒng)的采樣。執(zhí)行圖4a中的控制算法,包括數(shù)字鎖相環(huán)、電壓PI調(diào)節(jié)以及id的計算;圖4b所示的中斷程序負(fù)責(zé)三相滯環(huán)比較控制。

4 仿真與實驗
在不對稱諧波負(fù)荷情況下,使用電力仿真軟件EMTP進(jìn)行了仿真(波形略)。從仿真結(jié)果來看,補償前的三相系統(tǒng)電流,屯波形不對稱、非正弦,且含有大量諧波;補償后ih,譏,ik對稱且與系統(tǒng)電壓同相位。
圖5示出采用所設(shè)詩的APF進(jìn)行補償后的實測波形。對比兩圖,補償后諧波含量明顯減小,APF諧波補償效果明顯。

5 結(jié)論
針對三相系統(tǒng)設(shè)計了一種基于DSP—ARM全數(shù)字控制的并聯(lián)有源電力濾波器。采用了基于能量守恒原理的直流側(cè)電壓控制方法,該方法能對諧波實現(xiàn)全補償。并且該控制策略對于不平衡的三相系統(tǒng)仍然有效。對不對稱諧波源進(jìn)行補償后可使三相電流保持對稱。仿真與實際測試結(jié)果表明了該控制策略的正確性。可使系統(tǒng)具有良好的諧波抑制特性和響應(yīng)速度。