
摘要:針對變頻器通信應(yīng)用,介紹了MODBUS協(xié)議的特點及其組成;設(shè)計了RS485電路接口;并以ARMCortex-M3微控制器為核心,設(shè)計了MODBUS協(xié)議的實現(xiàn)方案。針對變頻器F2000-G開發(fā)了嵌入式系統(tǒng).實現(xiàn)變頻調(diào)速功能,應(yīng)用于無損檢測試驗儀。
漏磁探傷作為非接觸式的無損探傷技術(shù),其具有檢測速度快、靈敏度高、無需耦合劑、易于實現(xiàn)自動化等特點,是鋼軌探傷技術(shù)的重點研究方向。為解決漏磁探傷研究中的實驗仿真問題,研制了基于嵌入式系統(tǒng)的無損探傷試驗儀,通過實現(xiàn)MODBUS協(xié)議與變頻器通信,以此驅(qū)動交流電機與機械試驗裝置,完成運動控制并進行無損探傷試驗。
針對無損探傷試驗儀中變頻器通信問題,依據(jù)MODBUS協(xié)議規(guī)定,利用RealView MDK開發(fā)了基于ARM Cortex-M3微控制器的嵌入式軟件,實現(xiàn)了與變頻器的MODBUS通信,完成變頻調(diào)速的運動控制功能。
1 MODBUS協(xié)議
1.1 MODBOS協(xié)議簡介
MODBUS是Gould Ine注冊的通訊協(xié)議商標,該協(xié)議具有糾錯能力強、數(shù)據(jù)傳輸量大、實時性好等特點,是工業(yè)自動控制領(lǐng)域使用較廣泛的通訊語言,目前已成為我國工業(yè)自動化領(lǐng)域的一種國家標準。
MODBUS協(xié)議定義了一個控制器能識別的消息結(jié)構(gòu),它描述了控制器請求訪問和應(yīng)答回應(yīng)其他設(shè)備的過程,以及錯誤檢測和記錄的規(guī)范,制定了報文字段和內(nèi)容的公共格式。MODBUS屬于應(yīng)用層報文傳輸協(xié)議,其通信結(jié)構(gòu)為一對多的主從查詢模式,即主從Master-Slave模式。MODBUS網(wǎng)絡(luò)上可以有多個從節(jié)點,但有且只能有一個主節(jié)點,主節(jié)點按照通信協(xié)議對從節(jié)點發(fā)出請求操作,從設(shè)備收到主節(jié)點的請求后,做出相應(yīng)的響應(yīng)再向主節(jié)點回復(fù)應(yīng)答消息。
1.2 MODBOS協(xié)議組成
MODBUS協(xié)議具有兩種傳輸模式:ASCII模式和RTU模式。ASCII模式中數(shù)據(jù)以ASCH字符碼表示,通過冒號、回車字符判定數(shù)據(jù)幀的起始和結(jié)束,采用IRC數(shù)據(jù)檢驗;RTU模式中數(shù)據(jù)以非壓縮BCD碼表示,通過時間標記實現(xiàn)數(shù)據(jù)幀起始判定,采用CRC數(shù)據(jù)校驗,具有數(shù)據(jù)吞吐量高、傳輸穩(wěn)定、通信效率高的優(yōu)點。
由于變頻調(diào)速系統(tǒng)的安全性能要求較高,所以選擇通信效率高、時間管理嚴格的RTU傳輸模式。在協(xié)議幀組成上,MODBUS定義了一個基本的,與通信層無關(guān)數(shù)據(jù)協(xié)議單元PDU(Protocol Data Unit),并通過在PDU上添加地址、校驗等附加域定義了應(yīng)用數(shù)據(jù)單元ADU(Application Data Unit),形成完整的數(shù)據(jù)幀,MODBUS RTU數(shù)據(jù)幀組成如表1所示。

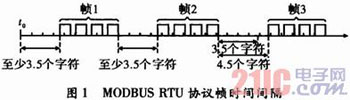
在數(shù)據(jù)幀起始判定上,MODBUS RTU采用了如圖1所示的時間標記方法,即相鄰的兩幀之間必須間隔至少為總線發(fā)送3.5個字符的時間,該時間稱為T3.5。
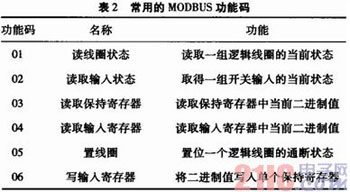
在MODBUS數(shù)據(jù)幀中,功能碼是指主節(jié)點對從節(jié)點的請求操作類型,常用的MODBUS功能碼及其功能如表2所示。
MODBUS RTU采用循環(huán)冗余校驗碼CRC(Cyclic Redundancy Check)是一種被廣泛采用的多項式編碼,編碼簡單且誤判概率很低,在串行通信、以太網(wǎng)、MPEG解碼等通信領(lǐng)域中得到了廣泛應(yīng)用。在通信過程中,發(fā)送方用待發(fā)送數(shù)據(jù)除以一個收發(fā)雙方約定的生成多項式,將得到余數(shù)作為CRC校驗多項式,附加在待發(fā)送數(shù)據(jù)尾部作為一個整體發(fā)送給接收方。接收方將收到的數(shù)據(jù)同樣除以生成多項式,若余數(shù)為零剛傳輸正常,若余數(shù)不為零則傳輸出錯。
2 電路連接及硬件參數(shù)
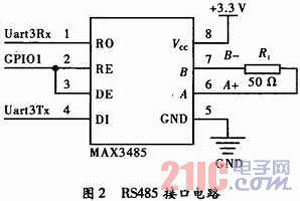
在無損探傷試驗儀中,選用基于ARM Cortex-M3內(nèi)核的STM32F103ZET6微控制器作為處理核心,而變頻器采用了煙臺惠豐公司的F2000-G矢量變頻酪。STM32F103ZET6通過基于MAX3485的RS485鏈路與F2000-G相連,按照MODBUS協(xié)議與之通信,實現(xiàn)變頻調(diào)速的控制功能。RS485接口電路如圖2所示,STM32F103ZET6的USART3的Uart3Rx、Uart3Tx連接到MAX3485的RO、DI以進行RS232的數(shù)據(jù)收發(fā);STM32F103ZET6的GPI01以I /O模式與MAX3485的接收使能端RE、發(fā)送使能端DE相連,對RS485半雙工總線的通信方向進行統(tǒng)一控制;而MAX3485的差分信號端A、B則通過插座與F2000-G相連,同時為保證通信質(zhì)量,消除總線上的信號反射,需在RS485網(wǎng)絡(luò)終端的差分總線間串聯(lián)50Ω的電阻R1。
在外設(shè)初始過程中,首先需要初始化USART3,按照F2000-G要求,采用的通信參數(shù)為:波特率9600kb·s-1,8位數(shù)據(jù)位,2位停止位,無奇偶校驗;其次,還需初始化STM32F103ZET6的GPI01為輸出模式,以此控制RS485的通信方向;再次,由于MODBUS RTU采用時間標記的方式進行協(xié)議幀的起始判定,所以使用STM32F103ZET6的定時器TIM2用以判定數(shù)據(jù)幀的結(jié)束,而MODBUS RTU中T3.5在工程應(yīng)用通常取4個字符發(fā)送時間,因此設(shè)置TIM2的溢出時間為3ms;最后,為處理可能的總線延遲等通信故障,本文使用了系統(tǒng)定時器SysTick作超時判定,綜合考慮到變頻器動作時間、通信延遲等因素,超時判定的時間閾值取200ms。
3 MODBUS協(xié)議實現(xiàn)
在變頻調(diào)速系統(tǒng)中,STM32F103ZET6作為主節(jié)點負責(zé)變頻調(diào)速系統(tǒng)的功能控制,而變頻器F2000-G作為MODBUS從節(jié)點負責(zé)響應(yīng)主節(jié)點的請求,完成對交流電機的運動控制。因此本文中變頻調(diào)速系統(tǒng)為基于MODBUS協(xié)議的主節(jié)點程序?qū)崿F(xiàn),MODBUS協(xié)議主要分為3部分:數(shù)據(jù)幀發(fā)送,數(shù)據(jù)幀接收和數(shù)據(jù)幀處理。
3.1 數(shù)據(jù)幀發(fā)送
發(fā)送數(shù)據(jù)時,必須將請求操作封裝成標準的MODBUS協(xié)議幀才能成功進行發(fā)送,即MODBUS協(xié)議的編碼。由前所述,數(shù)據(jù)協(xié)議單元PDU包括功能碼和數(shù)據(jù)碼,PDU的封裝可以歸納為將操作類型和操作參數(shù)作為參數(shù)封裝成PDU。構(gòu)建PDU之后,在數(shù)據(jù)幀頭部加入從機的地址,再將CR-C16校驗值寫入數(shù)據(jù)幀尾部即構(gòu)成完整的應(yīng)用數(shù)據(jù)單元ADU。
MODBUS中使用CRC16作為冗余校驗,按照循環(huán)冗余檢驗算法,使用標準16位生成多項式,可對任意長度的信息字段校驗出一個16位的校驗碼。其程序流程可描述如下:
(1)初始化一個16位寄存器,所有位進行置1。
(2)該16位寄存器與待校驗數(shù)據(jù)串中第1Byte的數(shù)據(jù)進行異或,結(jié)果存回該寄存器。
(3)該16位寄存器右移一位。
(4)若該寄存器右移移出位為1,則與校驗多項式0A001H異或,否則重復(fù)步驟3。
(5)重復(fù)步驟3和步驟4直到該Byte的8位數(shù)據(jù)均處理完畢。
(6)取數(shù)據(jù)串中下一個數(shù)據(jù)與該16位數(shù)據(jù)進行異或結(jié)果存回寄存器。
(7)重復(fù)步驟3~步驟6,直到待校驗數(shù)據(jù)串中所有的字節(jié)數(shù)據(jù)均處理完畢。
(8)該16位寄存器中數(shù)據(jù)即CRC16的最終校驗結(jié)果,加至數(shù)據(jù)幀末端。
因為STM32F103ZET6芯片內(nèi)USART3無硬件FIFO的特點,所以需要軟件上使用隊列的數(shù)據(jù)結(jié)構(gòu)作為發(fā)送緩沖和接收緩沖,以此進行串行口的收發(fā)任務(wù)。因此,在工作模式上USART3的發(fā)送采用查詢式發(fā)送,一次性將發(fā)送緩沖區(qū)中的數(shù)據(jù)依次循環(huán)地發(fā)送出去,即隊列的出隊操作;而其接收模式為中斷式,在USART3每次接收中斷的響應(yīng)函數(shù)中,軟件按時間先后順序?qū)?shù)據(jù)寫入接收緩沖區(qū)內(nèi),即隊列的入隊操作。
3.2 數(shù)據(jù)幀接收
在發(fā)送完請求幀后,STM32F103ZET6通過GPIO操作總線的收/發(fā)使能端,將RS485總線由發(fā)送狀態(tài)改為監(jiān)聽狀態(tài)。在監(jiān)聽過程中SMT32F1-03ZET6完成變頻器F2000-G應(yīng)答幀的接收。
由于MODBUS RTU應(yīng)答幀判定采取了時間標記法,因此本程序中使用了TM2作為觸發(fā)器進行時間管理。在接收過程中,USART3每次接收中斷對TM2進行復(fù)位操作以避免TIM2的溢出中斷;而當(dāng)總線空閑了3.5個字符的發(fā)送時間后,TM2由于缺少USART3的復(fù)位,將產(chǎn)生溢出中斷,在中斷響應(yīng)中完成關(guān)閉USART3結(jié)束數(shù)據(jù)通信和置應(yīng)答幀接收完成標志位的操作。這種時間標記的程序均在后臺中斷中完成,主程序只需查詢接收完成標志位即可。
另一方面,由于從節(jié)點F2000-G可能存在著超時、無應(yīng)答等通信故障,這就需要主節(jié)點STM32F103ZET6進行超時檢測。在STM32F103ZE6中,SysTick作為系統(tǒng)定時器,在芯片啟動后就以后臺方式運行,按ms計時并實時更新系統(tǒng)時間。因此在MODBUS RTU的超時判斷中,主程序可以利用該時鐘,循環(huán)地查詢當(dāng)前時刻,并和發(fā)送完請求幀的起始時刻比較,若閾值時間200ms內(nèi)仍然未收到請求幀,則認為通信失敗,返回應(yīng)答超時碼。
3.3 數(shù)據(jù)幀處理
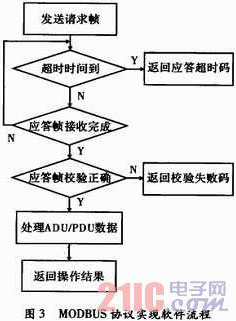
在完成數(shù)據(jù)幀正確接收的基礎(chǔ)上,STM32F0103ZET6必須進行應(yīng)答幀處理,即MODBUS協(xié)議幀的解碼。系統(tǒng)從接收緩沖區(qū)中讀取應(yīng)答幀。首先提取ADU進行地址碼和CRC校驗碼的判定;其次,再從PDU中提取ADU進行數(shù)據(jù)長度、功能碼、數(shù)據(jù)碼的判定;最后,如果校驗失敗則返回相應(yīng)的校驗失敗碼,若校驗成功,則繼續(xù)從ADU/PDU中提取的數(shù)據(jù)進行處理,完成變頻調(diào)速的各種功能操作。最終,整個協(xié)議實現(xiàn)的軟件流程如圖3所示。
4 嵌入式變頻調(diào)速系統(tǒng)
利用MODBUS協(xié)議,STM32F103ZET6可按照F2000-G提供的各種功能實現(xiàn)變頻調(diào)速的功能,例如目標頻率設(shè)置和變頻控制等。常用功能命令的地址及其參數(shù)功能如表3所示。

在實際應(yīng)用中,STM32F103ZET6通過HMI接口實現(xiàn)人機交互,根據(jù)用戶輸入實現(xiàn)對交流電機的變頻調(diào)速操作。例如,欲啟動電機進行無損探傷試驗時,程序?qū)2000-G的2000H處寄存器寫入狀態(tài)字0001H,啟動電機正轉(zhuǎn)運行。通信記錄如下,主節(jié)點STM32F103ZET6啟動變頻器發(fā)送:01 06 20 00 00 01 43 CA;如果從節(jié)點F2000-G操作正常則應(yīng)答:01 06 20 00 00 01 43 CA。
當(dāng)STM32F103ZET6正確讀取完應(yīng)答幀,并通過校驗后,即可判斷變頻器已成功啟動交流電機,機械試驗系統(tǒng)開始運行并逐步加速到目標轉(zhuǎn)速。
5 結(jié)束語
以STM32F103ZET6為核心的嵌入式系統(tǒng),通過MAX3485與變頻器F2000-G組成基于RS485的網(wǎng)絡(luò)。軟件部分介紹了MODBUS協(xié)議的特點及其組成,分析了MODBUS協(xié)議的實現(xiàn)原理,并結(jié)合嵌入式系統(tǒng)的工作特點實現(xiàn)了該協(xié)議的編程。基于MODBUS協(xié)議的嵌入式軟件通過與F2000-G的通信實現(xiàn)了對機電試驗裝置的變頻調(diào)速控制。實踐表明,該系統(tǒng)性能可靠、通信穩(wěn)定,滿足了無損探傷試驗儀在轉(zhuǎn)速為40~1 400r·min-1范圍內(nèi)變頻調(diào)速的控制需求。