
0 引 言
為了減少制動能量在列車制動電阻上的耗散,抑制地鐵隧道內(nèi)溫度的升高和減少車載設(shè)備,國外一般在牽引變電所的直流母線上設(shè)置再生制動能量吸收裝置。設(shè)置再生制動能量吸收裝置的供電系統(tǒng)區(qū)別于傳統(tǒng)的二極管不控整流供電系統(tǒng),又被稱為城市軌道交通新型供電系統(tǒng)。
新型牽引供電系統(tǒng)的結(jié)構(gòu)由若干整流器單元多重化并聯(lián)組成。采用這種結(jié)構(gòu)方式,可以提高系統(tǒng)的供電質(zhì)量,同時供電裝置擴(kuò)容容易,并可以提供一定的冗余性。另外其直流側(cè)的制動能量可以回饋到交流電網(wǎng),交流側(cè)功率因數(shù)可調(diào),并且直流側(cè)的輸出特性完全可控。
為了保障供電系統(tǒng)調(diào)試及運(yùn)行的正常,要求對供電系統(tǒng)動態(tài)過程中的各電氣參量、溫度值及開關(guān)量等進(jìn)行測量、傳輸、顯示、存儲及故障診斷,方便用戶觀察數(shù)據(jù)、分析數(shù)據(jù)。而目前測量電參數(shù)主要依靠示波器、電壓表、電流表以及萬用表等儀表裝置,這些儀表會影響PWM整流器的正常運(yùn)行、威脅技術(shù)人員人身安全、使調(diào)試過程復(fù)雜化等,急需開發(fā)一種新的技術(shù)來代替?zhèn)鹘y(tǒng)的測量儀器。此外,為方便設(shè)計人員調(diào)試修改供電系統(tǒng)底層程序,需要設(shè)計控制系統(tǒng),實(shí)現(xiàn)與主控板的數(shù)據(jù)通訊。
為了解決以上問題,本文研究了新型供電系統(tǒng)的監(jiān)控要求,以PWM整流器子系統(tǒng)為監(jiān)控對象,設(shè)計了包含監(jiān)測子系統(tǒng)和控制子系統(tǒng)的監(jiān)控試驗(yàn)平臺。
1 監(jiān)控系統(tǒng)方案
根據(jù)系統(tǒng)的設(shè)計要求、考慮到設(shè)計人員和使用人員的應(yīng)用層次不同,本文設(shè)計的新型能饋式牽引供電系統(tǒng)的監(jiān)控系統(tǒng)主要分為兩個部分,即監(jiān)測子系統(tǒng)和控制子系統(tǒng),如圖1所示。

由圖1可知,本監(jiān)測控制系統(tǒng)的主要由監(jiān)測子系統(tǒng)和控制子系統(tǒng)構(gòu)成,其中監(jiān)測子系統(tǒng)又包括下位機(jī)系統(tǒng)和上位機(jī)系統(tǒng),控制子系統(tǒng)主要通過設(shè)計控制器實(shí)現(xiàn)。新型能饋式牽引供電系統(tǒng)監(jiān)控結(jié)構(gòu)圖如圖2所示。

1.1 監(jiān)測子系統(tǒng)研究
新型能饋式牽引供電系統(tǒng)監(jiān)測子系統(tǒng)的示意圖如圖3所示,監(jiān)測子系統(tǒng)由下位機(jī)系統(tǒng)和上位機(jī)系統(tǒng)構(gòu)成。

1.1.1 監(jiān)控子系統(tǒng)的下位機(jī)系統(tǒng)研究
監(jiān)測子系統(tǒng)的下位機(jī)系統(tǒng)主要由多路傳感器、信號調(diào)理板、監(jiān)測板以及網(wǎng)絡(luò)通信傳輸單元構(gòu)成。監(jiān)測子系統(tǒng)的上位機(jī)系統(tǒng)由基于LabVIEW的監(jiān)測軟件組成。
監(jiān)測系統(tǒng)下位機(jī)系統(tǒng)的結(jié)構(gòu)如圖4所示。首先傳感器采集模擬量送給模擬信號調(diào)理板,PWM整流器單元給出相關(guān)數(shù)字量給數(shù)字量調(diào)理板。調(diào)理板將調(diào)理后的模擬信號、數(shù)字信號送給監(jiān)測板,監(jiān)測板可以將得到的信號通過網(wǎng)絡(luò)傳輸單元進(jìn)行數(shù)據(jù)傳輸。

1.1. 2 監(jiān)控子系統(tǒng)的上位機(jī)系統(tǒng)設(shè)計
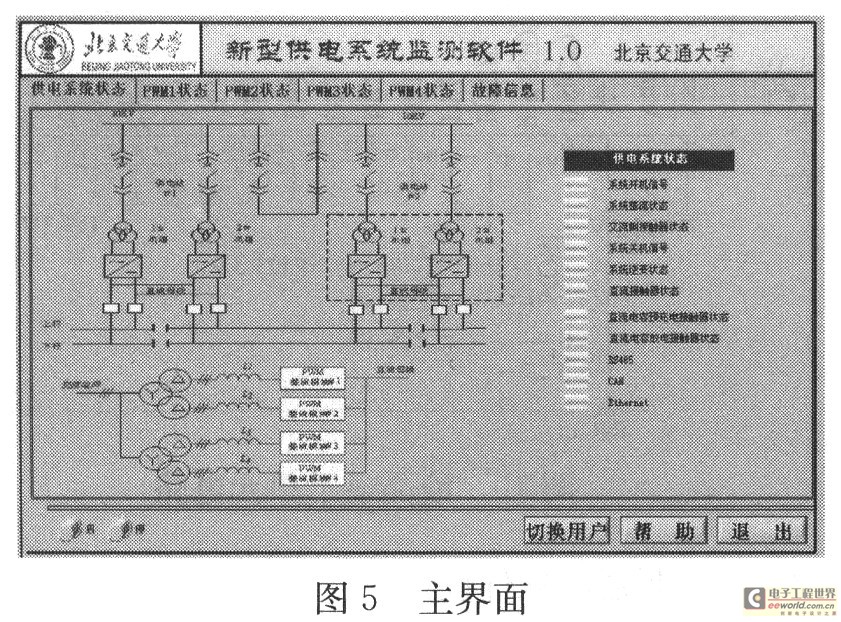
監(jiān)測系統(tǒng)上位機(jī)系統(tǒng)主要指上位機(jī)監(jiān)測軟件。本文應(yīng)用NI公司開發(fā)的LabVIEW軟件為平臺,在此基礎(chǔ)上開發(fā)新型能饋式牽引供電系統(tǒng)調(diào)試需要的上層監(jiān)測軟件。監(jiān)測軟件主界面大致分為6個部分,分別是供電系統(tǒng)狀態(tài)、PWM1狀態(tài)、PWM2狀態(tài)、PWM3狀態(tài)、PWM4狀態(tài)以及故障狀態(tài)。
其中,供電系統(tǒng)狀態(tài)主要用來顯示供電系統(tǒng)的整體狀態(tài),如變壓器、機(jī)組、接觸網(wǎng)信號等等;此外,在主界面右側(cè)顯示了供電系統(tǒng)的數(shù)字量信號,如開機(jī)信號、關(guān)機(jī)信號、整流狀態(tài)信號、逆變狀態(tài)信號、交流側(cè)接觸器狀態(tài)、直流側(cè)接觸器狀態(tài)等,如圖5所示。
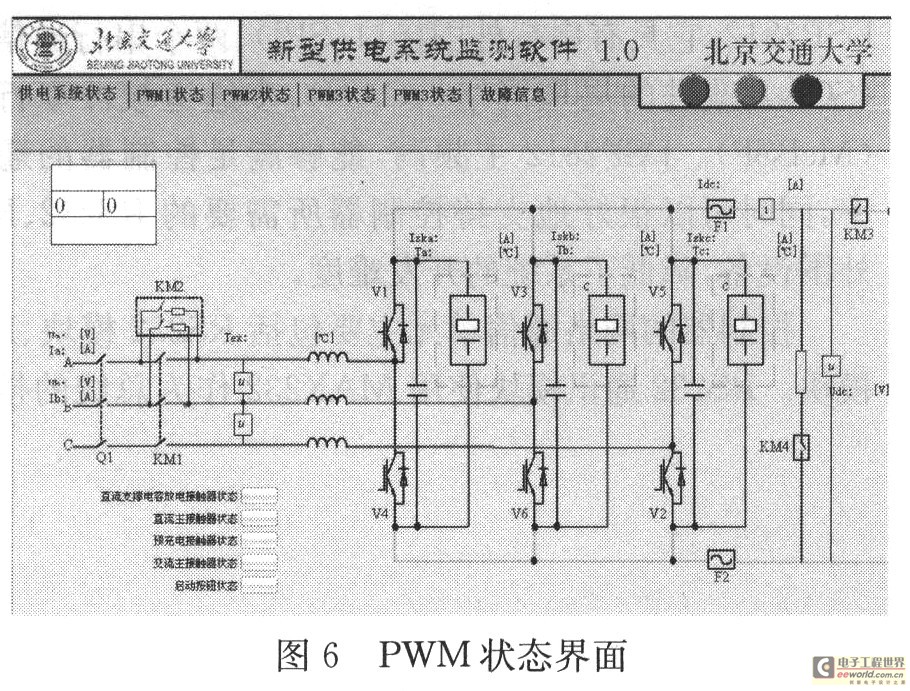
PWM1、P WM2、PWM3及PWM4狀態(tài):主要用來顯示每個PWM的運(yùn)行狀態(tài),如圖6所示。
此外,還設(shè)計了故障顯示界面,用于顯示系統(tǒng)故障信號及故障診斷結(jié)果。
1.1.3 以太網(wǎng)通信實(shí)現(xiàn)
在監(jiān)測子系統(tǒng)中,下位機(jī)系統(tǒng)通過以太網(wǎng)將監(jiān)測數(shù)據(jù)打包發(fā)送給上層監(jiān)測軟件,因此,以太網(wǎng)通信的實(shí)現(xiàn)對于監(jiān)測系統(tǒng)來說至關(guān)重要。
以太網(wǎng)通信結(jié)構(gòu)如圖7所示,硬件電路通過LAN91C11 1以太網(wǎng)芯片實(shí)現(xiàn),在網(wǎng)絡(luò)層通過IP自動分配以及ARP請求實(shí)現(xiàn)握手協(xié)議,在傳輸層通過UDP實(shí)現(xiàn)數(shù)據(jù)通信,從而將數(shù)據(jù)從下位機(jī)傳給上位機(jī)。

1.2 控制子系統(tǒng)設(shè)計
控制子系統(tǒng)即控制器,主功能分為4個部分:控制命令、參數(shù)查詢、故障信息、參數(shù)設(shè)置。有了這些功能,就能在一般環(huán)境中(無監(jiān)測儀器及PC機(jī))對供電系統(tǒng)的運(yùn)行情況、故障信息等進(jìn)行顯示,同時能對重要參數(shù)進(jìn)行修改。
1.2.1 控制器的硬件設(shè)計
控制器系統(tǒng)硬件組成主要有:CPU控制單元、網(wǎng)絡(luò)傳輸單元、液晶顯示單元、按鍵操作單元以及DA輸出單元。控制器的硬件結(jié)構(gòu)如圖8所示。

控制器的CPU單元采用TMS320C28X系列中的DSP2812,它具有串行外圍接口(SPI)、兩個串行通信接口(SCIs)、改進(jìn)的局域網(wǎng)絡(luò)(eCAN)、多通道緩沖串行接口(McBSP)。DSP2812主頻高,能夠滿足控制器的通訊速率,同時可以很好地支持控制器所需要的:RS232、RS485外圍設(shè)備,降低了系統(tǒng)的開發(fā)難度。
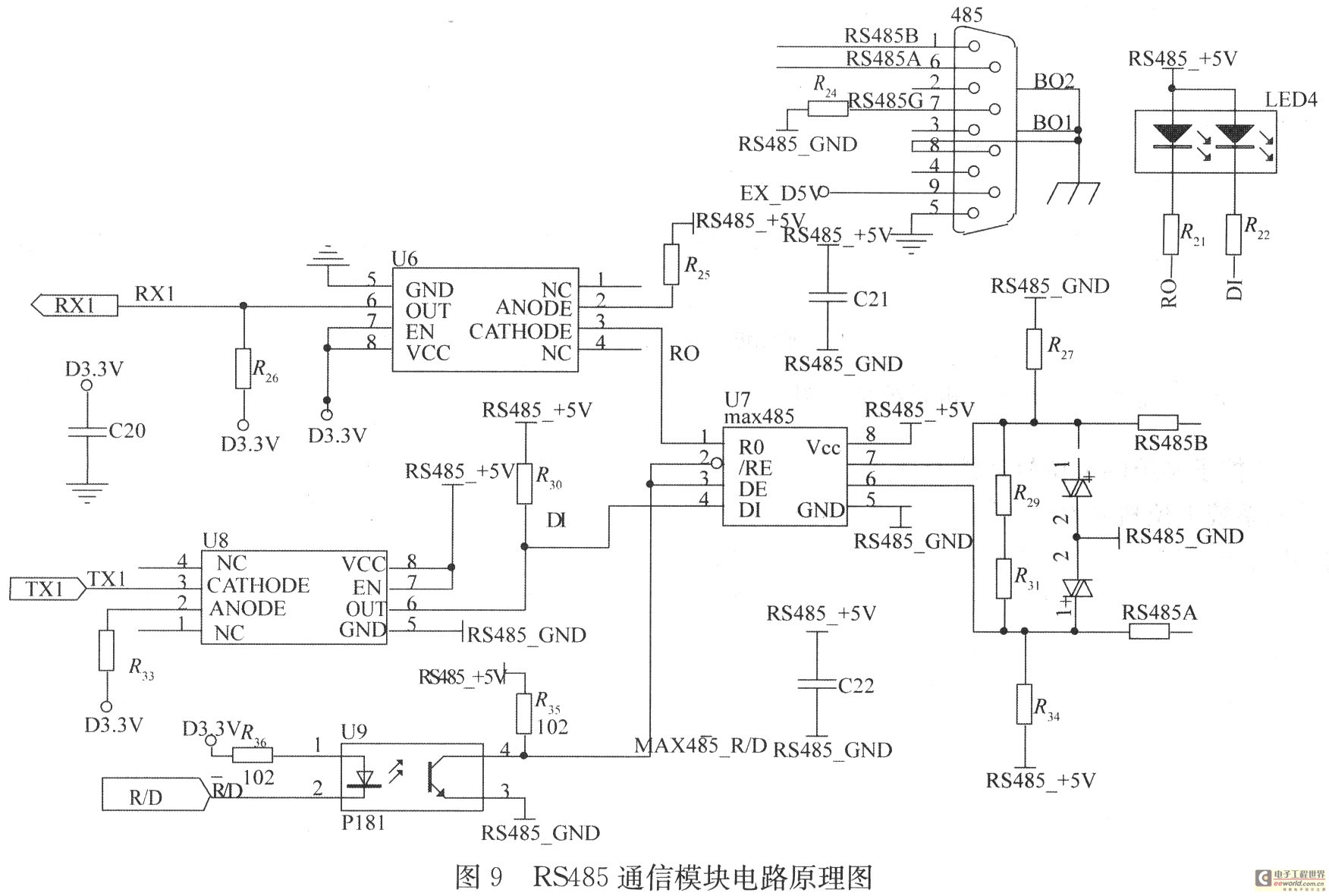
控制器的網(wǎng)絡(luò)通信單元主要包括RS232模塊、RS485模塊。RS232通訊模塊使用MAX232作為總線的接口芯片,與DSP的SCI接口相連。RS232主要用于控制器與PC機(jī)之間的通訊及實(shí)現(xiàn)DSP程序的遠(yuǎn)程燒寫。RS485通訊模塊使用MAX485作為總線的接口芯片,與DSP的SCI接口相連。模塊內(nèi)部采用了HCPL2610高速隔離光耦用作電平轉(zhuǎn)換和信號隔離,模塊的輸出側(cè)裝設(shè)了的防過壓涌流和抗干擾電路,以提高通訊的可靠性。RS4.85通信模塊電路如圖9所示。
控制器中的液晶顯示單元采用LCM128645ZK型中文液晶顯示模塊。該模塊電源操作范圍寬(2.7V to5.5V),其低功耗設(shè)計可滿足產(chǎn)品的省電要求。同時,模塊與微控器的接口界面靈活(三種模式:并行8位/4位,串行3線/2線),可實(shí)現(xiàn)漢字、ASCII碼、點(diǎn)陣圖形的同屏顯示,支持所有的主流液晶操作指令,預(yù)留多種控制線(復(fù)位/串并選擇/亮度調(diào)整)供用戶靈活使用。
LCM128645ZK型中文液晶顯示模塊使用串行總線方式時,只需要時鐘線與數(shù)據(jù)線結(jié)合其他必要的信號即可,硬件上可以大大簡化。串行方式時,DSP并不需要向外提供數(shù)據(jù)/地址總線其他的讀/寫信號,這使得DSP的管腳數(shù)并不需要很多,進(jìn)一步降低了硬件的復(fù)雜程度,提高了系統(tǒng)總體的工作可靠性。
因此,本文中LCM128645ZK型中文液晶顯示模塊工作于串行總線方式。DSP使用SPI通訊接口與LCM128645ZK進(jìn)行通訊,發(fā)送相關(guān)的控制指令和數(shù)據(jù),控制液晶模塊執(zhí)行相應(yīng)的操作,顯示相關(guān)的數(shù)據(jù)。液晶顯示單元的硬件電路如圖10所示。

1.2.2 控制器的軟件設(shè)計
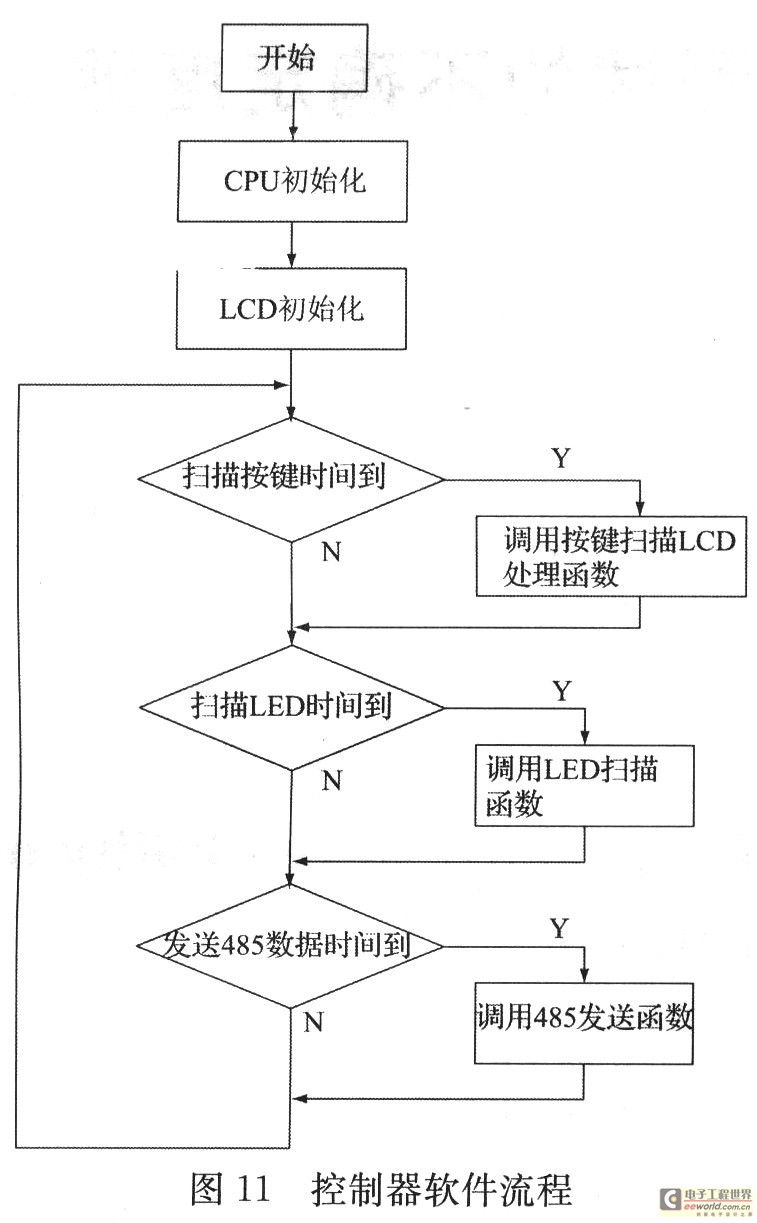
控制器軟件流程如圖11所示,控制器上電初始化后,系統(tǒng)先對CPU和液晶進(jìn)行初始化,設(shè)置必要的寄存器,清空液晶的顯示數(shù)據(jù),使其進(jìn)入相應(yīng)的工作方式。每隔10ms對按鍵掃描一次,檢查是否有鍵按下,如果有按鍵按下,則根據(jù)預(yù)先確定的工作時序控制液晶的顯示,實(shí)現(xiàn)頁面的翻轉(zhuǎn)、菜單項(xiàng)的移動、相關(guān)參數(shù)的修改和顯示等功能。每隔3s重新發(fā)送一次485通訊數(shù)據(jù)。這樣可以實(shí)現(xiàn)通訊上的冗余,增加通訊的可靠性。
2 結(jié)束語
本文研究了新型能饋式牽引供電系統(tǒng)監(jiān)測控制試驗(yàn)平臺,設(shè)計了監(jiān)控測試系統(tǒng)的監(jiān)測子系統(tǒng)(上位機(jī)系統(tǒng)、下位機(jī)系統(tǒng))、控制子系統(tǒng)(控制器)。經(jīng)過在實(shí)際裝置上的調(diào)試應(yīng)用,牽引供電系統(tǒng)監(jiān)控平臺滿足了新型能饋式牽引供電系統(tǒng)實(shí)際調(diào)試和運(yùn)行時的監(jiān)測要求,實(shí)現(xiàn)了預(yù)期功能。監(jiān)測平臺的數(shù)據(jù)和波形顯示實(shí)時性好,測量精度高,傳輸距離遠(yuǎn),數(shù)據(jù)可靠性強(qiáng)。本文提出的監(jiān)測平臺設(shè)計方案在牽引供電或者其他直流供電領(lǐng)域相關(guān)方面會有很好的應(yīng)用前景。