
摘要 識別和定位是用于室內(nèi)服務(wù)的關(guān)鍵信息,常見方法是估計(jì)RFID標(biāo)簽的位置。而在室內(nèi)環(huán)境下,信號遭受嚴(yán)重的損耗,標(biāo)簽的性能也會受到一定的限制。針對這些問題,文中對現(xiàn)存的RFID定位技術(shù)和定位原理加以總結(jié),在對RFID定位技術(shù)進(jìn)行闡釋和分類分析的基礎(chǔ)上,討論了在此領(lǐng)域的未來發(fā)展趨勢。
關(guān)鍵詞 RFID;定位;定位算法
隨著環(huán)境感知在室內(nèi)導(dǎo)航、物流管理、控制接入、實(shí)時(shí)監(jiān)控等領(lǐng)域的廣泛應(yīng)用。室內(nèi)定位感知系統(tǒng)以及無線網(wǎng)絡(luò)的定位研究備受關(guān)注,關(guān)于RFID(Radio Frequency Identification,RFID)定位技術(shù)的研究課題開始出現(xiàn)。基于RFID標(biāo)簽的定位技術(shù)遵循無線定位的基本原理準(zhǔn)則,考慮到RFID技術(shù)的特殊性和限制性,未來定位方法要注重從射頻傳播模型、讀寫器的多樣性、可擴(kuò)展性等方面進(jìn)行研究。文中主要對目前存在的RFID定位技術(shù)加以總結(jié),介紹現(xiàn)代室內(nèi)無線網(wǎng)絡(luò)中廣泛應(yīng)用的定位原理,并對主要的RFID定位方案進(jìn)行了分類。
1 RFlD技術(shù)
RFID是一種非接觸式自動識別技術(shù),它通過射頻信號自動識別目標(biāo)對象并獲取相關(guān)數(shù)據(jù)。RFID系統(tǒng)主要由:標(biāo)簽、讀寫器和數(shù)據(jù)庫管理單元3部分組成,如圖1所示。
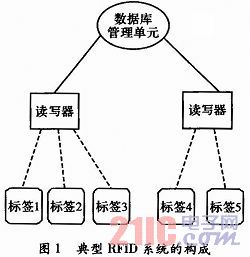
其工作原理是標(biāo)簽進(jìn)入磁場后,接收讀寫器發(fā)出的射頻信號,憑借感應(yīng)電流所獲得的能量發(fā)出存儲在芯片上的信息;或者主動發(fā)送出某一頻率的信號。讀寫器讀取信息并解碼后,送至數(shù)據(jù)管理系統(tǒng)進(jìn)行數(shù)據(jù)處理。
RFID標(biāo)簽可分為兩種:有源電子標(biāo)簽,標(biāo)簽的工作電源完全由內(nèi)部電池供給,同時(shí)標(biāo)簽電池的能量供應(yīng)也部分地轉(zhuǎn)換為電子標(biāo)簽與讀寫器通信所需的射頻能量。無源電子標(biāo)簽沒有內(nèi)裝電池,在讀寫器的讀出范圍之外時(shí),電子標(biāo)簽處于無源狀態(tài),在讀寫器的讀出范圍之內(nèi)時(shí),標(biāo)簽從讀寫器發(fā)出的射頻能量中提取其工作所需的電源。無源電子標(biāo)簽體積小、成本低,但在讀寫距離及適應(yīng)物體運(yùn)動方面比有源電子標(biāo)簽差。
RFID讀寫器由天線、射頻收發(fā)模塊、信號處理單元、控制單元和接口電路組成。射頻收發(fā)模塊完成射頻信號接收、發(fā)射、調(diào)制解調(diào)和功率控制;信號處理單元的主要功能為防沖突算法的實(shí)現(xiàn)和信息加密、解密、校驗(yàn)和糾錯(cuò);控制單元協(xié)調(diào)整個(gè)讀寫器的工作;接口電路完成讀寫器和數(shù)據(jù)管理系統(tǒng)之間的數(shù)據(jù)傳輸。
數(shù)據(jù)管理系統(tǒng)由數(shù)據(jù)庫完成數(shù)據(jù)的存儲和管理,它通過各種接口和分布于各處的RFID讀卡器通信,實(shí)時(shí)獲取RFID讀寫器捕獲的標(biāo)簽信息。
2 室內(nèi)無線網(wǎng)絡(luò)定位原理
室內(nèi)環(huán)境無線信號的傳播往往受到多徑、非視距、衍射和反射的影響,使得目前已提出的室內(nèi)定位算法并不能精確地測量信號。定位算法可以歸類為距離估計(jì)法、場景分析法和鄰近法。
2.1 距離估計(jì)法
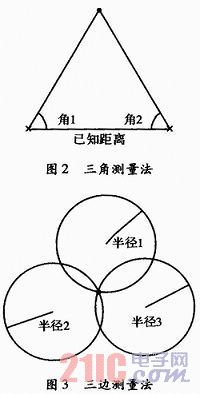
距離估計(jì)法是利用三角形的特點(diǎn)來估計(jì)待定位體的位置的算法。如圖2所示,三角測量法通過測量不少于兩個(gè)參考點(diǎn)所接收信號的到達(dá)角度,形成角度的兩條直線的交點(diǎn)即是所估計(jì)的位置。如圖3所示,三邊測量法通過測量待定位點(diǎn)到至少3個(gè)參考點(diǎn)的距離來估計(jì)待定位點(diǎn)的位置。這種測量技術(shù)利用接收信號接度(Received Signal Strength,RSS)、信號到達(dá)時(shí)間(Time Of Arrival,TOA)、信號到達(dá)時(shí)間差(Time-Difference Of Arrival,TDOA)和接收信號相位(Received Signal Phase,RSP)等方法。
(1)RSS:發(fā)射信號強(qiáng)度的衰減與發(fā)射機(jī)和接收機(jī)之間的距離成函數(shù)關(guān)系。依據(jù)相應(yīng)的傳播信號路徑損耗,把信號強(qiáng)度轉(zhuǎn)化為距離進(jìn)行定位,待定位點(diǎn)最少需要3個(gè)參考點(diǎn)參與計(jì)算。基于RSS的系統(tǒng)通常需要自適應(yīng)機(jī)制以減少室內(nèi)環(huán)境下多徑衰落及陰影效應(yīng)的影響。
(2)TOA:參考點(diǎn)與待定位點(diǎn)的距離與信號的傳播時(shí)間成比例關(guān)系。基于到達(dá)時(shí)間的系統(tǒng)最少需要3個(gè)不同的測量裝置來完成二維定位。 TOA系統(tǒng)要求所有的發(fā)射機(jī)和接收機(jī)之間保持時(shí)間同步。如果有多個(gè)參考點(diǎn),采用最小平方算法以減少定位誤差。
(3)TDOA:TDOA依據(jù)待定位點(diǎn)發(fā)射信號到達(dá)多個(gè)測量裝置的時(shí)間不同,把時(shí)間差轉(zhuǎn)化為距離差,以確定待定位點(diǎn)的相對位置。TDOA方法至少需要3個(gè)測量裝置參與距離差的測量,要求測量裝置之間保持時(shí)間同步。由于室內(nèi)環(huán)境非視距和多徑效應(yīng)的特點(diǎn),影響了信號的傳播時(shí)間,降低了定位精度。
(4)RSP:采用信號波長分式表示時(shí)延來估計(jì)距離。這種方法要求發(fā)射機(jī)放在特定位置并且假設(shè)發(fā)射機(jī)發(fā)射完全正弦信號。利用和TOA相同的算法測量相位值估計(jì)位置,也可以利用和TDOA相同的算法測量相位差值實(shí)現(xiàn)定位。RSP方法的缺點(diǎn)是應(yīng)用于室內(nèi)環(huán)境時(shí),要求滿足視距傳播路徑來減少定位誤差。
(5)AOA:主要利用方向天線或陣列天線測量待定位點(diǎn)信號直線到達(dá)接收機(jī)的角度信息來確定待定位點(diǎn)的位置。這項(xiàng)技術(shù)要求的設(shè)備復(fù)雜,并且無法克服陰影效應(yīng)和多徑的影響。
2.2 場景分析法
場景分析法由兩個(gè)步驟組成:(1)收集相關(guān)的環(huán)境信息。(2)通過把實(shí)時(shí)測量值與指紋集相匹配來估計(jì)待定位點(diǎn)的位置。常用的有基于信號強(qiáng)度的指紋識別技術(shù)。指紋識別技術(shù)主要分為K-近鄰法和概率統(tǒng)計(jì)法。
K-鄰居法:首先,測量已知位置的接收信號強(qiáng)度值,并且建立RSS數(shù)據(jù)庫。然后,在實(shí)時(shí)測量階段,用待定位點(diǎn)的RSS值與之前建立的信號空間相匹配,利用均方根法尋找K個(gè)最近值,確定出待定位點(diǎn)的位置。
概率統(tǒng)計(jì)法:依據(jù)后驗(yàn)概率和貝葉斯準(zhǔn)則,假設(shè)有Ⅳ個(gè)位置作為測量參考點(diǎn),測量待定位點(diǎn)移動時(shí)的信號強(qiáng)度矢量,選擇概率最高的作為待定位點(diǎn)的位置。一般來說,概率統(tǒng)計(jì)方法涉及4個(gè)階段:校準(zhǔn)、動態(tài)學(xué)習(xí)、誤差估計(jì)和歷史追蹤。
2.3 鄰近法
這種方法主要依賴天線的排列密度。當(dāng)待定位點(diǎn)進(jìn)入到一個(gè)接收機(jī)天線輻射區(qū)域時(shí),它的位置假定為此接收機(jī)位置。當(dāng)有多個(gè)天線檢測到待定位點(diǎn)時(shí),待定位點(diǎn)的位置假定為接收信號最強(qiáng)的接收機(jī)位置。這種方法簡單且較易實(shí)現(xiàn),但是,準(zhǔn)確性與天線相關(guān)。
3 射頻識別定位方法
目前已提出有多種不同的RFID方法,這些方法把室內(nèi)定位原理與RFID技術(shù)自身的特性相結(jié)合。
RFID定位方法可以分為:距離估計(jì)法、場景分析法、約束法。
3.1 距離估計(jì)法
(1)SpotON:SpotON系統(tǒng)采用可調(diào)整的長距離主動RFID標(biāo)簽,多個(gè)讀寫器收集標(biāo)簽的信號強(qiáng)度測量值,通過定義的函數(shù)來估計(jì)標(biāo)簽與讀寫器之間的距離,使用最小二乘法進(jìn)行計(jì)算。
(2)SAW ID—tags:表面聲波識別標(biāo)簽全部是無源標(biāo)簽,標(biāo)簽采用脈沖壓縮和編碼技術(shù)。測定每個(gè)標(biāo)簽脈沖反應(yīng)的頻率,接著標(biāo)簽重新傳送相關(guān)信號。重傳信號有一個(gè)自相關(guān)峰值,產(chǎn)生幅度值最高的脈沖響應(yīng)標(biāo)簽就是待定位點(diǎn)的標(biāo)簽。基于信號到達(dá)時(shí)間的方法測量每個(gè)讀寫器i與標(biāo)簽之間的距離如式(1)所示。

其中,Tsys是系統(tǒng)的時(shí)間延時(shí);Tcable,i是預(yù)校準(zhǔn)脈沖期間接收天線和解調(diào)器之間電纜傳輸延時(shí);TSAW是所有標(biāo)簽的時(shí)間延時(shí)。有3個(gè)估計(jì)距離時(shí),系統(tǒng)用三邊測量法定位標(biāo)簽。
(3)LPM:本地位置測量系統(tǒng)采用有源標(biāo)簽,讀寫器與已知固定位置的參考標(biāo)簽(RT)同步運(yùn)行。在收到激活指令后,選定的測量標(biāo)簽(MT)在時(shí)刻TMT響應(yīng)。每個(gè)讀寫器Ri相應(yīng)的時(shí)間差值通過式(2)計(jì)算

計(jì)算至少3個(gè)讀寫器的時(shí)間差值,用加權(quán)平均法估計(jì)標(biāo)簽的位置。
(4)RSP:RSP也稱為波達(dá)方向(Direction of Arrival,DOA),利用接收機(jī)處的陣列天線和波達(dá)方向估計(jì)技術(shù),確定接收機(jī)到信源的波達(dá)方向,利用多個(gè)接收機(jī)估計(jì)的DOA進(jìn)行三角測量,方向線的交點(diǎn)就是信源的估計(jì)位置。
3.2 場景分析法
(1)LANDMARC:LANDMARC系統(tǒng)主要采用K-近鄰法。已知位置的參考標(biāo)簽規(guī)則地分布在室內(nèi),讀寫器有8個(gè)不同的能量等級,通過比較讀寫器接收到待定位標(biāo)簽與參考標(biāo)簽信號強(qiáng)度值的大小來找出離待定位標(biāo)簽最近的幾個(gè)參考標(biāo)簽。

式(4)表示了參考標(biāo)簽與待定位標(biāo)簽的關(guān)系,n表示讀寫器的數(shù)量;Si表示讀寫器i接收到待定位標(biāo)簽的RSS值;θj,i表示讀寫器i接收到參考標(biāo)簽j的RSS值。根據(jù)這幾個(gè)參考標(biāo)簽的坐標(biāo),并結(jié)合它們的權(quán)重用經(jīng)驗(yàn)公式計(jì)算標(biāo)簽的位置。LANDMARC系統(tǒng)具有很高的定位精度,可擴(kuò)展性好,能處理比較復(fù)雜的環(huán)境,但由于信號的多路徑效應(yīng),定位精度不高;為了定位更加準(zhǔn)確,往往要放置更多的參考標(biāo)簽,需要增加成本,并且可能產(chǎn)生射頻干擾現(xiàn)象。
(2)VIRE:核心思想是在不增加額外參考標(biāo)簽的情況下,通過去掉不可能的位置以得到待定位物體更精確的位置。與LANDMARC不同的是,VIRE引入了近似圖的概念,近似圖覆蓋整個(gè)定位區(qū)域,并且劃分為多個(gè)小區(qū)域,其中每個(gè)區(qū)域的中心對應(yīng)著一個(gè)虛擬參考標(biāo)簽。每一個(gè)閱讀器都有一幅對應(yīng)的近似圖,如果閱讀器讀到的近似圖中某些區(qū)域的RSS值與讀到的待定位標(biāo)簽RSS值差的絕對值在某個(gè)閾值之內(nèi),則將這些區(qū)域標(biāo)記。假設(shè)有k個(gè)閱讀器,則在獲得k幅近似圖之后,通過取交集可以得到待定位標(biāo)簽最可能在的區(qū)域。若最后得到的區(qū)域數(shù)為n,則可以通過式(5)算出待定位標(biāo)簽的坐標(biāo)。
![]()
其中,權(quán)重w=w1i×w2i;w1i表示虛擬參考標(biāo)簽和被定位標(biāo)簽偏差;w2i是最后所得區(qū)域密度的相關(guān)函數(shù)。VIRE方法引入了虛擬參考標(biāo)簽的概念,使得在不增加額外標(biāo)簽的前提下提高了定位精度,VIRE方法對環(huán)境也有較好的適應(yīng)性,在復(fù)雜和封閉的環(huán)境中也有較高的精度。
(3)卡爾曼濾波:卡爾曼濾波法同樣利用參考標(biāo)簽。第一步,假定每個(gè)參考標(biāo)簽與待定位標(biāo)簽距離為Di,計(jì)算兩個(gè)讀寫器所接收到待定位標(biāo)簽的RSS值,采用最小均方差算法,建立系統(tǒng)的非線性方程。
![]()
第二步是建立一個(gè)讀寫器檢測區(qū)域的誤差測量概率圖。同樣地,用第一步的方法計(jì)算讀寫器收到參考標(biāo)簽的RSS值,依據(jù)估計(jì)位置和實(shí)際位置,推算出相應(yīng)的概率誤差分布函數(shù)。卡爾曼濾波利用迭代實(shí)時(shí)圖來減少RSS誤差影響,從而提高了定位精度。
(4)Scout:Scout技術(shù)屬于概率統(tǒng)計(jì)法定位技術(shù),這種方法采用參考標(biāo)簽和多個(gè)讀寫器確定主動標(biāo)簽的位置有以下3個(gè)步驟:首先,校準(zhǔn)參考標(biāo)簽的傳播參數(shù);其次,待定位標(biāo)與讀寫器之間的距離利用RSS概率模型計(jì)算出來;最后,應(yīng)用貝葉斯推論確定標(biāo)簽的位置。
3.3 約束法
3-D constrains:首先,定義包含性約束條件,如果一個(gè)讀寫器檢測一個(gè)標(biāo)簽,就表明它們之間的距離在讀寫器范圍之內(nèi)。同樣定義非包含性約束條件,讀寫器不能檢測到標(biāo)簽。把所定義的空間離散化為點(diǎn),從而減小讀寫器的檢測區(qū)域。最大約束條件下,點(diǎn)的集合的均值就是待定位標(biāo)簽的估值。

4 結(jié)束語
概括介紹了目前存在的RFID定位技術(shù),可以歸類為:距離估計(jì)法、場景分析法和約束法。RFID系統(tǒng)采用無源標(biāo)簽或有源標(biāo)簽,當(dāng)需要特定設(shè)備考慮環(huán)境的變化時(shí),一些技術(shù)還要求布置參考標(biāo)簽。相比而言,有些技術(shù)成本低并適合不同環(huán)境的使用。在實(shí)際環(huán)境中,這些RFID定位方案都有各自重要的特點(diǎn)和優(yōu)勢。定位方法和標(biāo)簽的選擇很大程度上影響著定位信息的準(zhǔn)確性,并且關(guān)系到整個(gè)RFID系統(tǒng)的成本和效率。
通過對RFID定位技術(shù)的總結(jié)和比較,結(jié)合自身的技術(shù)特點(diǎn),未來的RFID定位技術(shù)應(yīng)該注重以下幾個(gè)方面的研究:(1)射頻傳播模型:目前大多數(shù)RFID定位采用的是測量RSS值,但這些方法使用的是無線網(wǎng)絡(luò)模型。由于RFID系統(tǒng)傳播的特殊性,應(yīng)考慮建立合適的射頻模型。(2)移動性:應(yīng)考慮擁有靜態(tài)和動態(tài)讀寫器的混合系統(tǒng),以增加收集數(shù)據(jù)的數(shù)量和多樣性。(3)可擴(kuò)展性:在給定時(shí)間內(nèi)確定讀寫器讀取標(biāo)簽的數(shù)量、成功讀取標(biāo)簽的速度、讀取速度對準(zhǔn)確性的影響以及定位計(jì)算所需時(shí)間等,這些都是RFID定位技術(shù)的可擴(kuò)展性要研究的問題。(4)矩陣:由于對系統(tǒng)設(shè)計(jì)的要求,RFID定位方案不能直接進(jìn)行比較。引入矩陣概念,就可以針對系統(tǒng)的成本,進(jìn)行較準(zhǔn)確的比較。