
1 引言
本項(xiàng)目實(shí)施于上汽集團(tuán)在國(guó)內(nèi)的生產(chǎn)基地。該生產(chǎn)基地主要從事乘用車、商用車的生產(chǎn),本項(xiàng)目控制系統(tǒng)的主要功能是實(shí)現(xiàn)焊接生產(chǎn)線中主線和合裝工位的自動(dòng)控制,以及與其他工位的聯(lián)鎖控制。
2 項(xiàng)目設(shè)計(jì)
2.1 汽車制造工藝流程
汽車的生產(chǎn)制造由四大工序組成:沖壓、焊接、涂裝和總裝。簡(jiǎn)單來(lái)說(shuō),沖壓工序是完成車身各個(gè)部位零部件的加工;焊接工序是完成整個(gè)車身零部件的焊接;涂裝工序是完成車身的噴涂;總裝工序是完成發(fā)動(dòng)機(jī)、座椅、汽車控制系統(tǒng)及內(nèi)飾等的安裝。主線和合裝工位屬于焊接工序,是焊接生產(chǎn)線的重要組成部分。本系統(tǒng)由夾具和電控系統(tǒng)組成。項(xiàng)目簡(jiǎn)要工藝流程如圖1所示。
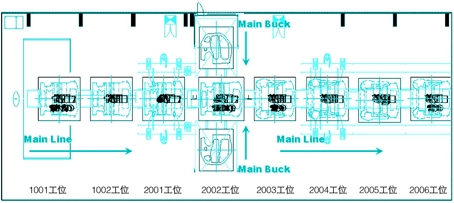
圖1 工藝流程簡(jiǎn)圖
2.2 自動(dòng)化裝配工位
(1) under body 1001 stn焊接夾具工位;
(2) under body 1002 stn焊接夾具工位;
(3) main line 2001 stn焊接夾具工位;
(4) main line 2002 stn 焊接夾具工位;
(5) main line 2003 stn 焊接夾具工位;
(6) main buck 合裝 焊接夾具工位;
(7) main line 2004 stn 焊接夾具工位;
(8) main line 2005 stn 焊接夾具工位;
(9) main line 2006 stn 焊接夾具工位;
(10) shutter工位(車身總成搬送機(jī)構(gòu))。
1 引言
本項(xiàng)目實(shí)施于上汽集團(tuán)在國(guó)內(nèi)的生產(chǎn)基地。該生產(chǎn)基地主要從事乘用車、商用車的生產(chǎn),本項(xiàng)目控制系統(tǒng)的主要功能是實(shí)現(xiàn)焊接生產(chǎn)線中主線和合裝工位的自動(dòng)控制,以及與其他工位的聯(lián)鎖控制。
2 項(xiàng)目設(shè)計(jì)
2.1 汽車制造工藝流程
汽車的生產(chǎn)制造由四大工序組成:沖壓、焊接、涂裝和總裝。簡(jiǎn)單來(lái)說(shuō),沖壓工序是完成車身各個(gè)部位零部件的加工;焊接工序是完成整個(gè)車身零部件的焊接;涂裝工序是完成車身的噴涂;總裝工序是完成發(fā)動(dòng)機(jī)、座椅、汽車控制系統(tǒng)及內(nèi)飾等的安裝。主線和合裝工位屬于焊接工序,是焊接生產(chǎn)線的重要組成部分。本系統(tǒng)由夾具和電控系統(tǒng)組成。項(xiàng)目簡(jiǎn)要工藝流程如圖1所示。
圖1 工藝流程簡(jiǎn)圖
2.2 自動(dòng)化裝配工位
(1) under body 1001 stn焊接夾具工位;
(2) under body 1002 stn焊接夾具工位;
(3) main line 2001 stn焊接夾具工位;
(4) main line 2002 stn 焊接夾具工位;
(5) main line 2003 stn 焊接夾具工位;
(6) main buck 合裝 焊接夾具工位;
(7) main line 2004 stn 焊接夾具工位;
(8) main line 2005 stn 焊接夾具工位;
(9) main line 2006 stn 焊接夾具工位;
(10) shutter工位(車身總成搬送機(jī)構(gòu))。
2.3 電控系統(tǒng)設(shè)計(jì)
電控系統(tǒng)完成的主要自動(dòng)化裝配功能是:汽車地板、發(fā)動(dòng)機(jī)艙、頂艙和左右側(cè)圍的焊接,以及與其他焊接工位的聯(lián)鎖控制。
電控系統(tǒng)由控制系統(tǒng)和生產(chǎn)現(xiàn)場(chǎng)兩個(gè)部分組成。控制系統(tǒng)集中安裝在主控制柜內(nèi)。主控制柜內(nèi)安裝生產(chǎn)線plc控制器及i/o模塊、變頻調(diào)速器、信號(hào)端子排、電源單元和其他附屬器件。系統(tǒng)還配有操作面板和觸摸屏,用于電控系統(tǒng)的運(yùn)行操作和運(yùn)行狀態(tài)及故障顯示。
控制系統(tǒng)主要完成生產(chǎn)現(xiàn)場(chǎng)各種數(shù)據(jù)的實(shí)時(shí)采集及監(jiān)控,并按焊裝線的操作時(shí)序向生產(chǎn)現(xiàn)場(chǎng)執(zhí)行機(jī)構(gòu)發(fā)出控制指令。生產(chǎn)現(xiàn)場(chǎng)部分由各個(gè)工位上的按鈕臺(tái),現(xiàn)場(chǎng)采集模塊et200eco、現(xiàn)場(chǎng)信號(hào)傳感器(行程開關(guān))、驅(qū)動(dòng)元件(電磁閥)、一套往復(fù)桿機(jī)構(gòu)電機(jī)等組成。這一部分向控制系統(tǒng)提供操作人員的操作信號(hào)和各種現(xiàn)場(chǎng)設(shè)備的運(yùn)行狀態(tài)信號(hào),同時(shí)接收來(lái)之控制系統(tǒng)的各種控制指令來(lái)驅(qū)動(dòng)電磁閥、電機(jī)等執(zhí)行機(jī)構(gòu)。各個(gè)工位的傳感器信號(hào)電纜和驅(qū)動(dòng)元件的控制電纜集中到附近的i/o采集模塊中,再通過(guò)profitbus總線同主控制柜plc相連。生產(chǎn)車間如圖2所示。
2.4 分布式自動(dòng)化平臺(tái)
數(shù)字i/o點(diǎn)多而且比較分散,對(duì)電氣故障安全性能要求高是汽車生產(chǎn)行業(yè)的特點(diǎn),針對(duì)具體的工藝控制要求,我們提出了一套低成本、結(jié)構(gòu)緊湊、配置靈活、高安全性能的控制系統(tǒng)。經(jīng)過(guò)認(rèn)真調(diào)研和周密思考,最終選擇西門子s7-300plc作為控制系統(tǒng)。本系統(tǒng)選用cpu 315-2dp作主控制器,總線采用profibus通訊。現(xiàn)場(chǎng)操作臺(tái)控制采用et200s擴(kuò)展。現(xiàn)場(chǎng)各個(gè)工位的傳感器信號(hào)和電磁閥控制采用分布式i/o et200eco模塊。傳送電機(jī)控制部分采用了simens的micromaster 440變頻器,plc通過(guò)總線通訊控制電機(jī)的運(yùn)行速度及運(yùn)轉(zhuǎn)方向。還有兩套西門子的人機(jī)界面,采用的是mp270b。它們與plc都是通過(guò) profibus進(jìn)行通訊的。最終選定西門子的主要硬件配置如附表所示。

附表 主要硬件配置
3 控制系統(tǒng)設(shè)計(jì)
3.1 西門子s7-300
plc是控制系統(tǒng)的核心,控制的性能,適用性,可靠性和性價(jià)比是選型的依據(jù)。本系統(tǒng)的控制要求高穩(wěn)定,高指令處理速度控制。并且要求安裝簡(jiǎn)單、維護(hù)方便、擴(kuò)展靈活、組網(wǎng)方便。基于西門子s7-300plc具有如下特點(diǎn):
(1) 模塊化微型plc系統(tǒng)及功能模塊,滿足中、小規(guī)模的性能要求;
(2) din標(biāo)準(zhǔn)導(dǎo)軌安裝,安裝簡(jiǎn)單,布置靈活;
(3) 簡(jiǎn)單實(shí)用的分布式結(jié)構(gòu)和多界面網(wǎng)絡(luò)能力,應(yīng)用靈活多變;
(4) 0.6~0.1μs高速的指令處理,功能豐富的模塊可以非常好地滿足和適應(yīng)自動(dòng)化控制任務(wù);
(5)編程軟件step7,結(jié)構(gòu)化程序開發(fā)思想,多種編程語(yǔ)言選擇,編程靈活,高效。組態(tài)軟件wincc,功能強(qiáng)大,畫面豐富,使用方便。完全可以實(shí)現(xiàn)本系統(tǒng)的控制功能。
人機(jī)界面的選擇,選用的是西門子的mp270b(規(guī)格:10.4" 640*480 256色),特點(diǎn)是可靠性高,組網(wǎng)方便,大屏幕,組態(tài)畫面豐富,功能強(qiáng)大,從操作性,易用性,友好性上可以完全滿足用戶的要求。人機(jī)界面主畫面如圖3所示。
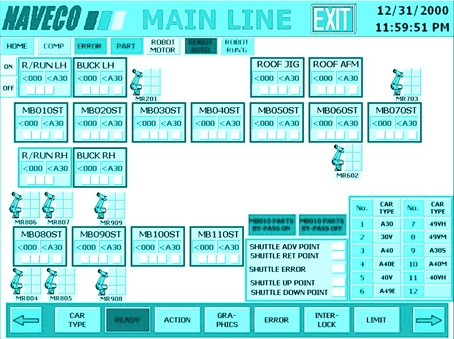
圖3 人機(jī)界面i/o檢測(cè)點(diǎn)畫
經(jīng)過(guò)縝密思考,最終我們選用了西門子s7-300 plc,考慮到系統(tǒng)的擴(kuò)展以及與其它廠家西門子系統(tǒng)的互聯(lián),系統(tǒng)的通訊都采用了profibus,互連采用工業(yè)以太網(wǎng),cpu選用的是315-2dp,通訊模塊用的是cp343-1 lean和cp342-5。系統(tǒng)的硬件配置及系統(tǒng)結(jié)構(gòu)如圖4所示。
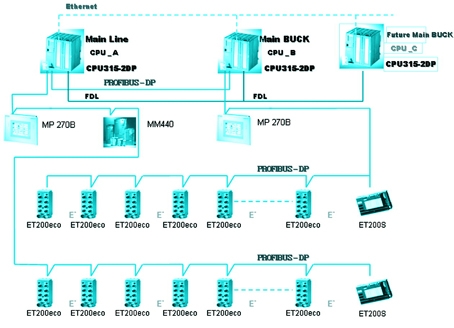
圖4 系統(tǒng)結(jié)構(gòu)
3.2 分布式裝配線自動(dòng)化系統(tǒng)
分布式i/o的選擇,主要是根據(jù)汽車生產(chǎn)行業(yè)數(shù)字i/o點(diǎn)多而且比較分散,對(duì)電氣故障安全性能要求高的特點(diǎn),以安裝簡(jiǎn)單,擴(kuò)展靈活,結(jié)構(gòu)緊湊,防護(hù)等級(jí)高,故障安全性能高為選型依據(jù)。系統(tǒng)選用的是西門子的et200s和et200eco分布式i/0。et200s是一種位-模塊式的分布式i/o系統(tǒng),它集成了siguard安全技術(shù),精確模塊化的面向功能的站結(jié)構(gòu),集成了profibus-dp連接的接口模塊,可以在運(yùn)行中更換使用著的模塊,結(jié)構(gòu)緊湊,安裝簡(jiǎn)便,靈活性大,以及運(yùn)行費(fèi)用較低等特點(diǎn)。et200eco是西門子經(jīng)濟(jì)型的ip65/67的分布式i/o系統(tǒng),它由profibus接口模塊,m12或ecofast連接件,現(xiàn)場(chǎng)i/o的端子模塊組成。
et200eco具有緊湊型、一體化的設(shè)計(jì),高達(dá)p67的防護(hù)等級(jí),采用了端子模塊和接口模塊分離的設(shè)計(jì),端子模塊上所有的i/o通道都支持短路保護(hù)和過(guò)載保護(hù)。同時(shí)支持通過(guò)profibus網(wǎng)絡(luò)進(jìn)行遠(yuǎn)程診斷等特點(diǎn)。硬件組態(tài)畫面如圖5所示。
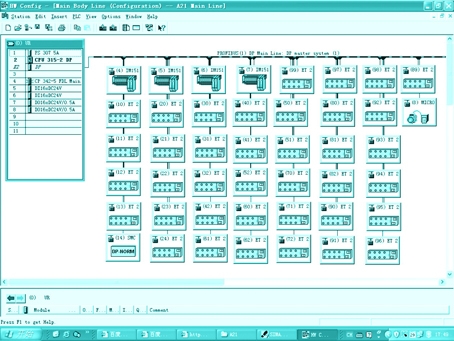
圖5 工藝流程組態(tài)畫面
3.3 控制系統(tǒng)功能設(shè)計(jì)
本系統(tǒng)允許操作者以兩種方式進(jìn)行操作——手動(dòng)方式和自動(dòng)方式。設(shè)備啟動(dòng)前應(yīng)確保plc模塊接線正確,電纜聯(lián)接正確,并且cpu模塊處于run狀態(tài)。設(shè)備啟動(dòng)(自動(dòng)方式),將各主控制柜的“自動(dòng)/手動(dòng)”轉(zhuǎn)換開關(guān)置于“自動(dòng)”位置。按主控制柜上的運(yùn)轉(zhuǎn)準(zhǔn)備按鈕,當(dāng)主控柜上的“運(yùn)轉(zhuǎn)準(zhǔn)備”指示燈點(diǎn)亮后按主控制柜上的自動(dòng)啟動(dòng)按鈕,當(dāng)主控柜上的“自動(dòng)啟動(dòng)”指示燈點(diǎn)亮后,設(shè)備啟動(dòng)(自動(dòng)方式)完成。
(1) 手動(dòng)控制:在手動(dòng)方式下,由操作者在運(yùn)行條件允許的情況下,手動(dòng)控制設(shè)備的每一個(gè)動(dòng)作。將主控制柜上的“自動(dòng)/手動(dòng)”轉(zhuǎn)換開關(guān)置于“手動(dòng)”位置。在“手動(dòng)”控制狀態(tài),1001stn、1002stn和輸送機(jī)構(gòu)可通過(guò)觸摸屏操作。2001-2006stn操作者可以通過(guò)操作臺(tái)上的按鈕來(lái)操作本工位的動(dòng)作。在手動(dòng)控制方式下,當(dāng)滿足以下條件時(shí),可通過(guò)按鈕來(lái)控制夾具動(dòng)作。
(2) 自動(dòng)控制:在自動(dòng)方式下,由操作者啟動(dòng)設(shè)備的自動(dòng)控制程序,由系統(tǒng)自動(dòng)控制設(shè)備的運(yùn)行。將主控制柜與各工位上的“自動(dòng)/手動(dòng)”轉(zhuǎn)換開關(guān)均置于“自動(dòng)”位置后按住“自動(dòng)啟動(dòng)”按鈕約三秒鐘,系統(tǒng)進(jìn)入自動(dòng)狀態(tài),此時(shí)若將某工位操作臺(tái)上的“自動(dòng)/手動(dòng)”轉(zhuǎn)換開關(guān)置于“手動(dòng)”位置,系統(tǒng)即停止自動(dòng)運(yùn)行。在自動(dòng)控制方式下1001、1002工位上件后可通過(guò)工位旁的按鈕操作相應(yīng)夾具動(dòng)作,其余工位地板夾具當(dāng)車體放好后夾具自動(dòng)夾緊。每個(gè)焊接完成后分別按鈕該工位兩側(cè)的兩個(gè)完成按鈕后夾具會(huì)自動(dòng)打開,頂升氣缸自動(dòng)將車體升起,待所有工位工作完成車體全部頂起后輸送機(jī)構(gòu)自動(dòng)前進(jìn)將車體整體向前移動(dòng)一個(gè)工位。
(3) cpu故障:當(dāng)cpu的sf指示燈點(diǎn)亮?xí)r,則cpu存在硬件或軟件故障。當(dāng)cpu出現(xiàn)不可處理故障時(shí),cpu轉(zhuǎn)入stop(停止)狀態(tài),設(shè)備不能運(yùn)行。cpu故障的處理:關(guān)閉cpu電源,再重新上電;如故障仍然存在,則關(guān)閉cpu電源;接通cpu電源;執(zhí)行復(fù)位cpu寄存器操作;如故障仍存在,則cpu存在硬件故障,更換cpu模塊;重新下裝plc控制程序;將cpu的運(yùn)行模式置于運(yùn)行模式。
(4) 直流電源保護(hù):當(dāng)為plc的數(shù)字量模塊端子提供電源的24v直流電源輸出端出現(xiàn)短路情況時(shí),直流電源可能進(jìn)入保護(hù)狀態(tài)。此時(shí)直流電源輸出端電壓急劇降低,無(wú)法驅(qū)動(dòng)系統(tǒng)的輸入/輸出設(shè)備。當(dāng)出現(xiàn)直流電源保護(hù)時(shí),需將直流電源輸入端斷開后再重新接通,系統(tǒng)即恢復(fù)正常。
(5) 急停報(bào)警:觸發(fā):當(dāng)按下主按控制柜或任意工位操作面板或按鈕臺(tái)上的急停按鈕時(shí),將觸發(fā)急停報(bào)警;影響:當(dāng)急停報(bào)警觸發(fā)后,所有工位及主控制柜急停報(bào)警燈亮,主控柜報(bào)警聲音輸出,觸摸屏顯示相應(yīng)報(bào)警工位。報(bào)警將停止整條生產(chǎn)線設(shè)備的運(yùn)行;復(fù)位:將各急停按鈕恢復(fù)正常狀態(tài),并按下主控制柜或任意工位操作面板上的“故障復(fù)位”按鈕,則急停報(bào)警信號(hào)被清除。
(6)壓力報(bào)警:觸發(fā):在1001、2001、2003、2005工位左側(cè)有個(gè)壓力檢測(cè)開關(guān),用來(lái)檢測(cè)氣壓的大小。當(dāng)無(wú)氣壓或氣壓過(guò)小時(shí),則壓力檢測(cè)開關(guān)發(fā)送信號(hào),觸發(fā)壓力報(bào)警。觸摸屏上壓力故障指示燈亮;影響:觸摸屏顯示報(bào)警,主控柜報(bào)警聲音輸出。報(bào)警將停止整條生產(chǎn)線設(shè)備的運(yùn)行;復(fù)位:壓力狀態(tài)恢復(fù)正常后,按主控柜或任意工位操作面板上的“故障復(fù)位”按鈕,壓力報(bào)警信號(hào)自動(dòng)被清除,按啟動(dòng)順序重新啟動(dòng)設(shè)備運(yùn)行;
(7) 限位開關(guān)和電磁閥故障報(bào)警:觸發(fā):當(dāng)控制夾具動(dòng)作的電磁閥接通時(shí)間超過(guò)夾具動(dòng)作所需的時(shí)間,而夾具動(dòng)作到位的限位開關(guān)信號(hào)未返回時(shí),或者當(dāng)檢測(cè)夾具開、關(guān)的限位開關(guān)信號(hào)同時(shí)存在時(shí),觸發(fā)限位故障報(bào)警,相應(yīng)工位ls故障指示燈點(diǎn)亮;影響:限位開關(guān)故障報(bào)警將暫停相關(guān)工位的設(shè)備的動(dòng)作;原因:氣壓過(guò)低導(dǎo)致夾具動(dòng)作未到位。夾具與工件間的位置偏差導(dǎo)致夾具動(dòng)作未到位。plc到電磁閥的控制線路故障導(dǎo)致電磁閥未動(dòng)作。電磁閥故障導(dǎo)致電磁閥未動(dòng)作。復(fù)位:當(dāng)故障解決后按主控柜或任意操作臺(tái)“故障復(fù)位”按鈕,報(bào)警狀態(tài)清除。
(8) 傳送電機(jī)報(bào)警:觸發(fā):當(dāng)傳送電機(jī)過(guò)載,觸發(fā)變頻器報(bào)警;處理:傳送電機(jī)報(bào)警將禁止shtl的動(dòng)作;復(fù)位:當(dāng)過(guò)載保護(hù)信號(hào)及變頻器故障信號(hào)均消失后,按下主控制柜上的復(fù)位按鈕,傳送電機(jī)報(bào)警被清除。
(9) 車體落位異常故障:觸發(fā):在設(shè)備的每個(gè)工位有兩個(gè)接近開關(guān),用來(lái)檢測(cè)車體落位情況。車體落位共三種狀態(tài):車體落位正常、車體落位異常、無(wú)工件。當(dāng)一個(gè)接近開關(guān)感應(yīng)到信號(hào)而另一個(gè)接近開關(guān)沒(méi)感應(yīng)到信號(hào)這種狀態(tài)達(dá)到三秒示為車體落位異常,該工位車體落位異常故障指示燈亮;影響:該工位車體落位異常故障指示燈亮。該工位動(dòng)作將停止運(yùn)行;復(fù)位:車體落位狀態(tài)恢復(fù)正常后,按主控柜或任意工位操作面板上的“故障復(fù)位”按鈕,車體落位異常報(bào)警信號(hào)自動(dòng)被清除,按啟動(dòng)順序重新啟動(dòng)設(shè)備運(yùn)行。
4 結(jié)束語(yǔ)
目前,本項(xiàng)目正處在試運(yùn)行階段,系統(tǒng)運(yùn)行穩(wěn)定、可靠。程序功能強(qiáng)大,畫面操作友好、靈活、方便。獲得該公司領(lǐng)導(dǎo)和技術(shù)人員的一致好評(píng),深得現(xiàn)場(chǎng)操作人員的喜愛。據(jù)悉,等項(xiàng)目完全運(yùn)行之后,該公司準(zhǔn)備上二期工程。通過(guò)項(xiàng)目的實(shí)施和調(diào)試,對(duì)西門子的控制系統(tǒng)有了更深層次的把握,對(duì)西門子分布式i/o的應(yīng)用有了更深的認(rèn)識(shí)。
(1) 西門子的控制系統(tǒng)功能強(qiáng)大,模塊豐富,組態(tài)靈活,擴(kuò)展方便。
(2)西門子的編程軟件step7,結(jié)構(gòu)化程序開發(fā)思想,多種編程語(yǔ)言選擇,編程靈活,高效。組態(tài)軟件wincc,功能強(qiáng)大,畫面豐富,使用方便。
(3)本系統(tǒng)的優(yōu)點(diǎn)在于采用了profibus通訊和分布式i/o控制的結(jié)構(gòu)模式,不但大大節(jié)省了控制線纜,而且充分發(fā)揮了西門子控制系統(tǒng)的優(yōu)勢(shì),提高了系統(tǒng)的穩(wěn)定性和可靠性。