
1 概述
PWM 前端控制整流由于具有直流電壓的變化,輸入功率因數校正( PFC) 和輸入電流諧波控制的能力等優(yōu)點, 被廣泛用于三相交直交電壓系統(tǒng)。由前端整流器、直流電容, 以及逆變器組成的三相交直交電壓系統(tǒng)廣泛用于在線式U PS 。基于DSP 控制的在線式UPS 的結構圖如圖1 所示。

圖1 基于DSP 控制的在線式UPS 的結構圖
圖1 中, 主電路由輸入變壓器、輸入濾波電路、電壓和電流檢測電路、蓄電池、功率電路、輸出濾波電路和靜態(tài)開關等組成。其中功率電路包括三個部分, 即輸入的PFC、三相全橋逆變器、DC/ DC 部分。電路信號采用TMS320C2812 控制。該控制器是T I 軟件公司開發(fā)的, 可方便地進行匯編, 執(zhí)行控制程序和錯誤檢查。一般PFC 升壓整流控制器通常有兩個反饋回路,外部電壓環(huán)路和內在電流環(huán)路。電壓調節(jié)器產生電流控制的d 軸電流, 而在q 軸電流控制是零的單位功率因數, 其控制如圖2 所示。

圖2 帶負載功率反饋的傳統(tǒng)PWM控制系統(tǒng)
在正常工作條件下, 穩(wěn)壓器輸出穩(wěn)定的直流母線電壓和d 軸電流控制, 但是逆變器負荷不均衡, 就會產生波動的直流電壓, 因此整流器在不平衡負載下會造成前端總諧波失真( THD) 的輸入電流。
相關研究表明直流電壓濾波問題所造成的原因是由于不平衡的逆變器的負載電流和不平衡的輸入電壓造成的, 然而, 他們的控制目標不是提高電能質量的投入, 而是盡量減少直流環(huán)節(jié)電壓。
一些研究人員已用開關函數概念的電力轉換器,顯示存在的諧波直流母線電壓。本文將用這些已量化的工程來處理諧波波動問題, 仿真和實驗結果將有效地證明本文提出的新型控制技術。
2 系統(tǒng)分析
一個標準的基于DSP 控制在線式UPS 系統(tǒng)如圖3 所示。系統(tǒng)由推動型的前端整流器、直流鏈接、電壓源逆變器構成。這兩個功率轉換器使用標準的空間矢量PWM 控制, 產生快速電壓調節(jié)與總諧波失真最小化控制逆變器。
逆變控制系統(tǒng)模型" border="0" height="156" src="http://files.chinaaet.com/images/20111025/1847ef3f-0ad4-4b44-8547-3a8ca0261f1e.jpg" width="500" />
圖3 基于DSP 控制的三相整流逆變控制系統(tǒng)模型
影響負載平衡分析如下。該逆變器的輸入:
![]()
式中, SA , S B 和SC 是交換功能的交換機頂端的三個逆變器的開關, 如下:

擴大這些功能交換, 假設標準正弦相位電流如下:
式中, A K是k 階的組成部分。AK ≡0 的所有三角變換后, 可以得出:
式中, I inv0是直流分量的逆變器輸入電流; I invn 是n 階部分的電流。通過公式( 4) 可看到, I outA = I outB = I outC和ΦA= ΦB= ΦC , 同時有I invn = 0, 如果n》 0 三相負載電流是平衡的。否則, 交流成分存在會造成連鎖反應。
由公式( 4) 可以得出, 考慮到固定的三相電流, I inv0 僅正比A 1 , I inv2是一個關于A 1的線性組合, A3 I inv4 和A3A5是一個線性組合, 等等。在低頻率范圍內, 由于Ak ≡0 所以I inv0= 0.
根據標準空間矢量PWM , 各次諧波的算法:

式中, q= 0, 1, 2, ……∝;ω m 是調制頻率; ωc 是載波頻率; ωm ≤ωc , a是調制指數; J v ( z) 是第一類Bessel 函數。公式( 5) 只適用于頻率范圍遠遠低于載波頻率, 此時在一次波段的載波頻率可以忽略不計。在本文的系統(tǒng)研究中, m / c= 1/ 90 適用于規(guī)定計算, 并假設調制指數:
A1 = 1, A 3= 1. 142 ×10 -4 , A 5= 3. 020 ×10- 8.
二次諧波會導致不平衡的前端三相輸入電流。抑制二次諧波直流電壓, 不會解決當前不平衡的問題, 因為目前仍然是不穩(wěn)定的控制策略, 提出了要消除失控,但有第二次諧波分量和反饋。
3 控制策略
在電源應用中, 基本逆變器輸出的標準電壓頻率是50 Hz, 但直流母線諧波必須是兩次, 可設計以制止數字帶阻濾波器與已知諧波頻率。在數字濾波器中,便以2n 的低層和高層截止頻率ω1 和ω2 來設計, 使用MAT ALAB 仿真。
離散時間滑模控制器( DSMC) , 其中已被更為有效證明是用于內部電流環(huán)。DSMC 仿真的描述如下。
在整流電路包括輸入電感如圖3 可以作為一個模式LTI 系統(tǒng)和代表的狀態(tài)空間。在離散時間, 該系統(tǒng)可以被描述如下:
![]()
式中, 輸入電流i in ; 整流控制電壓v pw m; 輸入電源電壓vin 都代表參加同步dq 參照系數, A i, Bi 和Ei, 為系統(tǒng)確定的電路參數。鑒于當前的逆變命令i ref ( k) ,DSMC 仿真相當于控制式如下:
![]()
直流母線電壓和PWM 技術可以用來確定整流控制電壓限制速度, 可以得到的實際控制電壓公式:

4 仿真結果
為了直觀地比較傳統(tǒng)和本文提出控制技術, 在不平衡的負載下分別建立了不同的模型。不良的負序分量的輸入電流已接近消除, 輸入電流總諧波失真也會減少。這一結果意味著, 解耦之間的逆變器和整流器實現了在不平衡負載輸入電流直流環(huán)節(jié)。圖4 和圖5顯示不同的動態(tài)性能之間的控制器與諧波補償的研究。通過比較, 可以得知, 傳統(tǒng)的控制技術存在不平衡的三相輸入電流和低失真, 本文的控制技術是穩(wěn)定的。
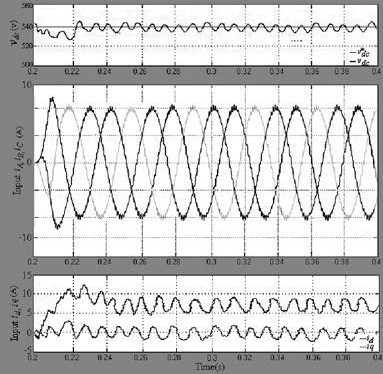
圖4 傳統(tǒng)控制策略的仿真結果

圖5 新型控制策略的仿真結果
5 實驗結果
基于兩個數字控制器T MS320C2812 DSP 控制整流器和逆變器, 分別在圖3 使用相同的負載進行模擬實驗。圖6為在線收集的穩(wěn)態(tài)下的直流電測量值和篩選值。顯然, 直接測量Udc為代表的100 Hz 組成部分得到顯著抑制, 由四階濾波器證明了這一瞬態(tài)測試。
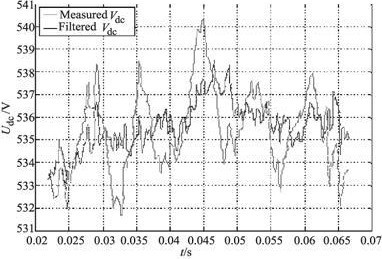
圖6 測量Udc過濾Udc的實驗結果

圖7 傳統(tǒng)iinAB相的實驗結果
做以上重復的模擬實驗, 其結果如圖7 和圖8 所示。
可以看出, 本文提出的控制技術提高了平衡的三相輸入電流, 相似的波形如圖4 和圖5 的仿真結果。

圖8 新型iinAB相的實驗結果
6 結論
本文提出一種新型前端PWM 整流的標準整流逆變控制技術系統(tǒng), 以實現解耦之間的轉換與直流電容在不平衡負載下連結三相逆變器, 針對前端控制的整流器在不平衡負載的影響分析, 在此基礎上設計和使用了電壓電流環(huán)回路, 制止2 次諧波分量的直流電壓反饋, 對整流器和逆變器的輸入電流進行過濾, 使其不破壞動態(tài)響應的直流母線電壓。通過仿真和實驗結果有效地證明了本文所提出的新型控制技術。