
摘 要:文章提出了一種基于單片機(jī)的雙電源雙風(fēng)機(jī)智能保護(hù)控制系統(tǒng)的設(shè)計(jì)方案,簡(jiǎn)要介紹了該系統(tǒng)的組成與工作原理,著重分析了系統(tǒng)的互補(bǔ)控制策略和啟動(dòng)控制策略。現(xiàn)場(chǎng)試驗(yàn)表明,該系統(tǒng)能準(zhǔn)確可靠地實(shí)現(xiàn)主、備風(fēng)機(jī)的自動(dòng)切換,并可減小啟動(dòng)沖擊電流對(duì)電源的影響。
關(guān)鍵詞:礦井;雙電源雙風(fēng)機(jī);微機(jī)保護(hù);控制策略
0 引言
目前,我國煤礦通風(fēng)系統(tǒng)中,雙電源雙風(fēng)機(jī)是一種比較高效、安全的風(fēng)機(jī)組成形式,其自動(dòng)切換裝置是系統(tǒng)中的關(guān)鍵設(shè)備,直接關(guān)系到整個(gè)系統(tǒng)能否安全運(yùn)轉(zhuǎn)。因此,雙電源雙風(fēng)機(jī)自動(dòng)切換裝置保護(hù)、控制方式的有效性與可靠性對(duì)其安全運(yùn)行至關(guān)重要。
目前,已運(yùn)行的雙電源雙風(fēng)機(jī)大都采用繼電器控制,功能少、可靠性差、控制精度低,尤其在現(xiàn)場(chǎng)事故發(fā)生時(shí)無法自動(dòng)采取緊急措施,嚴(yán)重影響了設(shè)備的安全運(yùn)行。因此,本文提出了一種新型的基于單片機(jī)的雙電源雙風(fēng)機(jī)智能保護(hù)控制系統(tǒng)的設(shè)計(jì)。該系統(tǒng)運(yùn)用CAN總線技術(shù),結(jié)合自適應(yīng)互補(bǔ)控制策略,可以方便地檢測(cè)雙電源雙風(fēng)機(jī)的各項(xiàng)運(yùn)行參數(shù);當(dāng)風(fēng)機(jī)出現(xiàn)故障或工作不正常時(shí),能夠?qū)崟r(shí)準(zhǔn)確地采取相應(yīng)的故障處理措施,并發(fā)出警告信息;能準(zhǔn)確可靠地實(shí)現(xiàn)主、備風(fēng)機(jī)的自動(dòng)切換,當(dāng)一臺(tái)風(fēng)機(jī)出現(xiàn)故障停機(jī)后,另一臺(tái)風(fēng)機(jī)自動(dòng)啟動(dòng),保證井下供風(fēng)不間斷;多臺(tái)風(fēng)機(jī)依次啟動(dòng),可避免多臺(tái)設(shè)備同時(shí)啟動(dòng)時(shí)產(chǎn)生過大啟動(dòng)電流而損壞設(shè)備。
1 雙電源雙風(fēng)機(jī)保護(hù)控制系統(tǒng)的組成
雙電源雙風(fēng)機(jī)保護(hù)控制系統(tǒng)結(jié)構(gòu)如圖1所示。
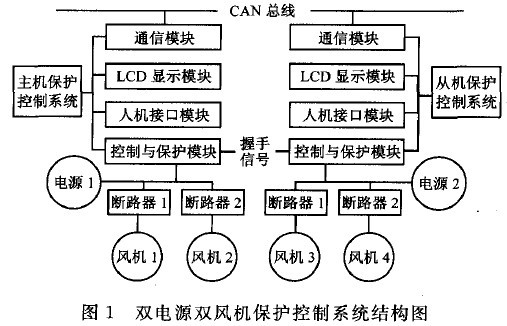
該系統(tǒng)包括主機(jī)和從機(jī)2個(gè)保護(hù)控制系統(tǒng),控制核心采用雙CPU結(jié)構(gòu),下設(shè)通信、LCD顯示、人機(jī)接口、控制與保護(hù)4個(gè)功能模塊。其中,8位 AVR單片機(jī)作為上位機(jī),負(fù)責(zé)實(shí)現(xiàn)LCD顯示、人機(jī)交互、CAN總線通信等功能;16位DSPIC單片機(jī)作為下位機(jī),負(fù)責(zé)實(shí)時(shí)采集處理數(shù)據(jù),執(zhí)行保護(hù)算法,對(duì)風(fēng)機(jī)進(jìn)行保護(hù)與控制。這種結(jié)構(gòu)可以提高系統(tǒng)的實(shí)時(shí)性,使CPU分工明確,提高效率。
來自電網(wǎng)的雙電源分別對(duì)主機(jī)保護(hù)控制系統(tǒng)與從機(jī)保護(hù)控制系統(tǒng)單獨(dú)供電。主機(jī)與從機(jī)互補(bǔ),保證供風(fēng)系統(tǒng)不問斷運(yùn)行。同時(shí),主機(jī)保護(hù)控制系統(tǒng)與從機(jī)保護(hù)控制系統(tǒng)分別控制2臺(tái)風(fēng)機(jī)的運(yùn)行。
由于主機(jī)保護(hù)控制系統(tǒng)與從機(jī)保護(hù)控制系統(tǒng)是2個(gè)相互獨(dú)立又相互互補(bǔ)的系統(tǒng),這就要求主機(jī)控制系統(tǒng)與從機(jī)控制系統(tǒng)不僅要清楚本系統(tǒng)所處的狀態(tài),同時(shí)還要明白互補(bǔ)系統(tǒng)所處的狀態(tài)。所以主機(jī)控制系統(tǒng)與從機(jī)控制系統(tǒng)之間需要以某種方式進(jìn)行通信。
因?yàn)殡p電源雙風(fēng)機(jī)保護(hù)控制系統(tǒng)必須嚴(yán)格保證井下的持續(xù)供風(fēng),所以從機(jī)在主機(jī)停機(jī)時(shí)必須立即投入運(yùn)行。CAN總線作為一種軟件通信方式,會(huì)由于井下工作環(huán)境的復(fù)雜多變或軟件協(xié)議本身延遲等原因無法使互補(bǔ)系統(tǒng)在第一時(shí)間接收到表示對(duì)方工作狀態(tài)的幀。從供風(fēng)系統(tǒng)的可靠性和連續(xù)性方面考慮,這是不允許的。所以,本系統(tǒng)采用了基于硬件的互補(bǔ)系統(tǒng)通信方式。
該通信方式是在主機(jī)和從機(jī)各設(shè)置1個(gè)輔助繼電器作為“握手信號(hào)”,其連接方式如圖2所示。

Z-JZ-1與Z-JZ-2為主機(jī)輔助繼電器的1個(gè)常閉接點(diǎn),F(xiàn)-ZJ-1與F-ZJ-2為從機(jī)輔助繼電器的1個(gè)常閉接點(diǎn),Zflag與 Fflag為系統(tǒng)狀態(tài)檢測(cè)信號(hào)。主機(jī)/從機(jī)輔助繼電器隨著主機(jī)/從機(jī)開關(guān)斷路器的分合閘而分合閘,以通知對(duì)方目前所處的狀態(tài)。系統(tǒng)默認(rèn)檢測(cè)信號(hào)為高電平表示主機(jī)/從機(jī)處于合閘運(yùn)行狀態(tài),低電平表示主機(jī)/從機(jī)處于分閘狀態(tài)。
該通信方式的特點(diǎn)在于通信簡(jiǎn)單可靠,風(fēng)機(jī)控制系統(tǒng)可以在較短時(shí)間內(nèi)有效地檢測(cè)到互補(bǔ)系統(tǒng)的狀態(tài),從而決定本系統(tǒng)的控制策略。
2 系統(tǒng)互補(bǔ)控制策略
雙電源雙風(fēng)機(jī)保護(hù)控制系統(tǒng)的工作環(huán)境要求其工作必須可靠,嚴(yán)格保證井下供風(fēng)的持續(xù)性。這就要求無論是在所有風(fēng)機(jī)均處于正常狀態(tài)或是在某些風(fēng)機(jī)處于故障狀態(tài)的情況下,控制系統(tǒng)必須和它的互補(bǔ)系統(tǒng)一起決定最佳的通風(fēng)控制策略。
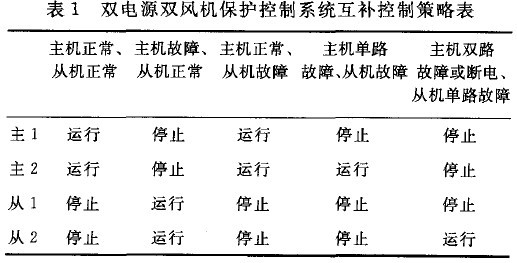
表1為雙電源雙風(fēng)機(jī)保護(hù)控制系統(tǒng)在不同狀態(tài)下的互補(bǔ)控制策略表,其最大限度地利用了未發(fā)生故障的風(fēng)機(jī)資源,保證了井下通風(fēng)的持續(xù)性。表中,主機(jī)故障或從機(jī)故障包括主機(jī)或從機(jī)任何一臺(tái)風(fēng)機(jī)發(fā)生故障以及主機(jī)或從機(jī)斷電的情況;主機(jī)或從機(jī)單路故障均假定為主1或從1發(fā)生了故障。
2.1 主機(jī)保護(hù)控制系統(tǒng)程序流程
一般說來,主機(jī)保護(hù)控制系統(tǒng)作為井下通風(fēng)的常用系統(tǒng),接收外部輸入的系統(tǒng)啟動(dòng)命令,控制整個(gè)互補(bǔ)系統(tǒng)投人運(yùn)行。其通過控制Zflag信號(hào)變化和檢測(cè)Fflag信號(hào)保證控制策略的實(shí)現(xiàn)。圖3為主機(jī)保護(hù)控制系統(tǒng)程序流程圖。
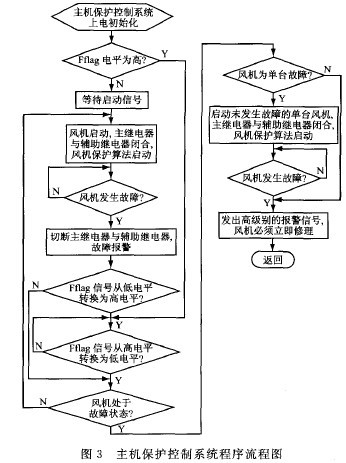
主機(jī)保護(hù)控制系統(tǒng)輔助繼電器隨主斷路器的分合閘而分合閘,由一個(gè)常閉接點(diǎn)控制Zflag信號(hào)變化。Zflag信號(hào)從低電平轉(zhuǎn)換為高電平表示主機(jī)啟動(dòng),從高電平轉(zhuǎn)化為低電平表示主機(jī)停止。
當(dāng)主機(jī)合閘運(yùn)行時(shí),保護(hù)控制系統(tǒng)的各種保護(hù)算法啟動(dòng),對(duì)運(yùn)行中的風(fēng)機(jī)進(jìn)行各種故障的保護(hù)。一旦檢測(cè)到風(fēng)機(jī)在運(yùn)行中發(fā)生故障,先斷開主斷路器,切斷風(fēng)機(jī)電源,發(fā)出故障報(bào)警,上傳故障信息;同時(shí),斷開輔助繼電器,轉(zhuǎn)入分閘待機(jī)狀態(tài)。
當(dāng)主機(jī)處于分閘待機(jī)時(shí),保護(hù)控制系統(tǒng)實(shí)時(shí)檢測(cè)Fflag信號(hào)狀態(tài)。如果Fflag信號(hào)一定時(shí)間內(nèi)處于低電平或從高電平轉(zhuǎn)換為低電平,則主機(jī)保護(hù)控制系統(tǒng)先進(jìn)行自檢。若系統(tǒng)控制的風(fēng)機(jī)沒有發(fā)生故障或沒有全部發(fā)生故障,主機(jī)保護(hù)控制系統(tǒng)立刻啟動(dòng)未發(fā)生故障的風(fēng)機(jī),轉(zhuǎn)入合閘運(yùn)行狀態(tài)。
2.2 從機(jī)保護(hù)控制系統(tǒng)程序流程
從機(jī)保護(hù)控制系統(tǒng)一般作為井下通風(fēng)的備用系統(tǒng),接收外部的啟動(dòng)信號(hào),不只有在主機(jī)保護(hù)控制系統(tǒng)控制的風(fēng)機(jī)發(fā)生故障的情況下,才作為備用系統(tǒng)投入運(yùn)行。
從機(jī)保護(hù)控制系統(tǒng)輔助繼電器隨其主斷路器的分合閘而分合閘,由一個(gè)常閉接點(diǎn)控制Fflag信號(hào)變化,F(xiàn)flag信號(hào)從低電平轉(zhuǎn)換為高電平表示從機(jī)啟動(dòng),從高電平轉(zhuǎn)換為低電平表示從機(jī)停止。從機(jī)保護(hù)控制系統(tǒng)程序流程與主機(jī)類似,不再贅述。
3 系統(tǒng)啟動(dòng)控制策略
3.1 系統(tǒng)啟動(dòng)時(shí)的沖擊電流分析
基于上述分析,一個(gè)雙電源雙風(fēng)機(jī)保護(hù)控制系統(tǒng)可控制2臺(tái)風(fēng)機(jī),這2臺(tái)風(fēng)機(jī)共用1個(gè)電源。而在實(shí)際現(xiàn)場(chǎng),通風(fēng)通道可能不止1個(gè),需要多個(gè)保護(hù)控制系統(tǒng)控制2臺(tái)以上的風(fēng)機(jī)進(jìn)行通風(fēng)。這些主機(jī)保護(hù)控制系統(tǒng)可能共用的是一個(gè)電源,而其互補(bǔ)從機(jī)保護(hù)控制系統(tǒng)則共用另一個(gè)電源,這就出現(xiàn)了在1個(gè)電源上掛接多臺(tái)風(fēng)機(jī)的情況。風(fēng)機(jī)屬于感應(yīng)電動(dòng)機(jī),其啟動(dòng)電流沖擊較大,等于風(fēng)機(jī)的堵轉(zhuǎn)電流,大約為其額定電流的5~7倍。假設(shè)在1個(gè)電源上接了N臺(tái)風(fēng)機(jī)負(fù)載,每臺(tái)風(fēng)機(jī)的額定電流皆為IN,如果這N臺(tái)風(fēng)機(jī)負(fù)載同時(shí)啟動(dòng),將對(duì)電源產(chǎn)生N×(5~7)IN的沖擊電流,容易造成電源系統(tǒng)低電壓。
為了防止上述情況的發(fā)生,必須在風(fēng)機(jī)啟動(dòng)方面采取一定的措施。由于單臺(tái)風(fēng)機(jī)的啟動(dòng)沖擊電流對(duì)電源影響較小,故可以采取適當(dāng)?shù)难訒r(shí)措施使多臺(tái)風(fēng)機(jī)依次啟動(dòng),使風(fēng)機(jī)在啟動(dòng)時(shí)對(duì)電源的電流沖擊保持在較低的水平。
3.2 系統(tǒng)啟動(dòng)控制策略分析
現(xiàn)以1個(gè)電源接4個(gè)保護(hù)控制系統(tǒng)、拖動(dòng)8臺(tái)風(fēng)機(jī)的供電系統(tǒng)為例,分析當(dāng)電源1發(fā)生故障、8臺(tái)風(fēng)機(jī)停機(jī)時(shí),與其互補(bǔ)的4個(gè)從機(jī)保護(hù)控制系統(tǒng)控制的8臺(tái)風(fēng)機(jī)立即啟動(dòng)運(yùn)行、維持井下供風(fēng)時(shí)的控制策略。
假定每臺(tái)風(fēng)機(jī)的額定電流皆為IN,設(shè)風(fēng)機(jī)電流與時(shí)間之間的函數(shù)關(guān)系如下:
I=f(t)E(t)(1)
式中:E(t)為階越函數(shù)。
在電源線路上的總電流Isum為

式中:fi(t)表示第i臺(tái)風(fēng)機(jī)電流與時(shí)間的關(guān)系函數(shù),fi(t)與一般的交流電動(dòng)機(jī)的電流與時(shí)間的關(guān)系函數(shù)大致相同;ti表示為第i臺(tái)風(fēng)機(jī)的啟動(dòng)時(shí)刻。
電源系統(tǒng)一般都設(shè)有保護(hù)裝置,發(fā)生短路故障時(shí)自動(dòng)跳閘。而風(fēng)機(jī)即感應(yīng)電動(dòng)機(jī)的短路保護(hù)定值一般設(shè)置在其額定電流的8倍以上。所以,在設(shè)置電源系統(tǒng)的短路保護(hù)定值時(shí),一般將其短路保護(hù)門限電流設(shè)置在當(dāng)8臺(tái)風(fēng)機(jī)都處于額定電流工作情況下,加上1臺(tái)風(fēng)機(jī)發(fā)生短路故障時(shí)產(chǎn)生的總電流。
所以,電源系統(tǒng)的短路保護(hù)電流門限值設(shè)置為(7+8×1)IN=15IN。
雙電源雙風(fēng)機(jī)保護(hù)控制系統(tǒng)啟動(dòng)控制策略的目標(biāo)是調(diào)整各風(fēng)機(jī)的啟動(dòng)時(shí)間t1~t8,使其在任何時(shí)刻滿足條件:
Isum<15IN (3)
因風(fēng)機(jī)的啟動(dòng)過程一般比較短暫,而上述目標(biāo)函數(shù)涉及到8個(gè)可變量,求解比較困難,故可將條件簡(jiǎn)化,即假設(shè)在第i(i>2)臺(tái)風(fēng)機(jī)接收到啟動(dòng)命令時(shí),第i-1臺(tái)風(fēng)機(jī)還處于啟動(dòng)過程中,風(fēng)機(jī)電流f t-1(t)>IN,而第i-2臺(tái)以及更早啟動(dòng)的風(fēng)機(jī)則可以默認(rèn)已處于啟動(dòng)完成狀態(tài),風(fēng)機(jī)電流可以直接用IN代替。因此,可以將系統(tǒng)啟動(dòng)控制策略的條件改變?yōu)?br />
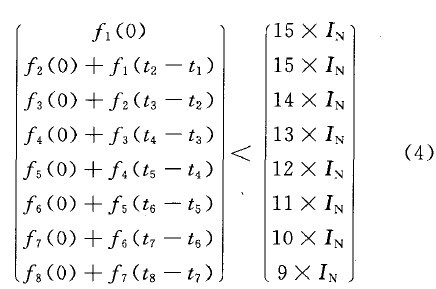
因?yàn)閒i(0)等于風(fēng)機(jī)的堵轉(zhuǎn)電流,所以式(4)還可進(jìn)一步簡(jiǎn)化為
由于每個(gè)條件只與其中的2個(gè)時(shí)間參數(shù)有關(guān),這樣就使得系統(tǒng)的控制策略大大地得到了簡(jiǎn)化。
3.3 系統(tǒng)啟動(dòng)控制策略的具體實(shí)現(xiàn)
雙電源雙風(fēng)機(jī)智能保護(hù)控制系統(tǒng)實(shí)現(xiàn)啟動(dòng)控制策略的措施:事先測(cè)定時(shí)間t1-tn并設(shè)定首臺(tái)風(fēng)機(jī),首臺(tái)風(fēng)機(jī)接收到啟動(dòng)信號(hào)后立即啟動(dòng);當(dāng)任意第i臺(tái)風(fēng)機(jī)啟動(dòng)的同時(shí),系統(tǒng)內(nèi)部時(shí)鐘開始計(jì)時(shí),經(jīng)過時(shí)間ti+1-ti之后,通過CAN總線發(fā)送允許第i+1臺(tái)風(fēng)機(jī)啟動(dòng)的啟動(dòng)信號(hào),則第i+1臺(tái)風(fēng)機(jī)接收到該信號(hào)后立即啟動(dòng)。
本系統(tǒng)利用時(shí)間判據(jù)控制風(fēng)機(jī)啟動(dòng),取代一般情況下利用電流判據(jù)控制風(fēng)機(jī)啟動(dòng)的方法,是出于對(duì)井下供風(fēng)持續(xù)性的要求。如果用電流判據(jù)控制風(fēng)機(jī)的啟動(dòng),由于啟動(dòng)電流很大,此時(shí)用于檢測(cè)電流的互感器可能處于非最佳的線性檢測(cè)區(qū),A/D轉(zhuǎn)換芯片也可能因?yàn)殡娏鬟^大而處于最大值。這些原因?qū)⑹箚纹瑱C(jī)內(nèi)部經(jīng)算法計(jì)算出來的電流結(jié)果與實(shí)際電流結(jié)果產(chǎn)生誤差。而該誤差將導(dǎo)致采用電流判據(jù)判別啟動(dòng)條件的過程較采用時(shí)間判據(jù)判別的過程所用時(shí)間長,從而使系統(tǒng)的實(shí)時(shí)性下降。
4 結(jié)語
本文介紹了一種雙電源雙風(fēng)機(jī)智能保護(hù)控制系統(tǒng)的設(shè)計(jì)。該系統(tǒng)采用的互補(bǔ)控制策略和啟動(dòng)控制策略,夠?qū)崿F(xiàn)主機(jī)和從機(jī)的及時(shí)切換,能保證供風(fēng)系統(tǒng)不間斷地運(yùn)行,同時(shí)能夠減小由于多臺(tái)風(fēng)機(jī)同時(shí)啟動(dòng)對(duì)電源造成的沖擊。經(jīng)過現(xiàn)場(chǎng)調(diào)試與試驗(yàn),該系統(tǒng)取得了良好的使用效果,保證了井下供風(fēng)的持續(xù)性,使井下通風(fēng)系統(tǒng)的安全系數(shù)大大增加。該智能保護(hù)控制系統(tǒng)的下一步改進(jìn)方向是基于環(huán)境變化(如風(fēng)量、瓦斯?jié)舛鹊淖兓龋?利用智能控制技術(shù)實(shí)時(shí)調(diào)整控制策略,使系統(tǒng)更加適應(yīng)生產(chǎn)環(huán)境的要求,進(jìn)一步提高安全系數(shù)。
參考文獻(xiàn):
[1]劉洪文,王翰卿.雙風(fēng)機(jī)自動(dòng)轉(zhuǎn)換裝置的改裝方法[J].電氣開關(guān),2005(3):47~48.
[2]張廣勛,蔣德獻(xiàn),劉利亞.基于自動(dòng)切換技術(shù)的雙電源雙風(fēng)機(jī)的研究[J].礦山機(jī)械,2007,35(2):44~46.
[3]湯蘊(yùn)瓔,史乃.電機(jī)學(xué)[M].北京:機(jī)械工業(yè)出版社,2003.
[4]梁偉,童少為,艾學(xué)忠.一種智能數(shù)據(jù)采集和控制模塊的設(shè)計(jì)[J].測(cè)控技術(shù),2004(4):76~78.
[5]尹積婷,李西平,嚴(yán)斌,等.基于CAN總線的礦用智能傳感器研究[J].測(cè)控技術(shù),2006(11):6~8.