
GPS接收機(jī)是可以接收全球定位系統(tǒng)衛(wèi)星信號(hào)以確定地面空間位置的儀器。GPS衛(wèi)星發(fā)送的導(dǎo)航定位信號(hào),是一種可供無(wú)數(shù)用戶共享的信息資源。對(duì)于陸地、海洋和空間的廣大用戶,只要用戶擁有能夠接收、跟蹤、變換和測(cè)量GPS信號(hào)的接收設(shè)備,即GPS信號(hào)接收機(jī)。GPS接收機(jī)的使用要在開(kāi)闊的可見(jiàn)天空下,所以,屋里就不能用了。手持GPS的精度一般是誤差在10米左右,就是說(shuō)一條路能看出走左邊還是右邊。精度主要依賴于衛(wèi)星的信號(hào)接收,和可接收信號(hào)的衛(wèi)星在天空的分布情況,如果幾顆衛(wèi)星分布的比較分散,GPS接收機(jī)提供的定位精度就會(huì)比較高。
GPS接收機(jī)的主要任務(wù)是跟蹤可見(jiàn)GPS衛(wèi)星,對(duì)接收到的衛(wèi)星無(wú)線電信號(hào)經(jīng)過(guò)數(shù)據(jù)處理后獲得定位所需的測(cè)量值和導(dǎo)航信息,最后完成對(duì)用戶的定位運(yùn)算和可能的導(dǎo)航任務(wù)。GPS接收機(jī)的內(nèi)部結(jié)構(gòu)沿其工作流程的先后順序,通常分為射頻(RF)前端處理、基帶數(shù)字信號(hào)處理(DSP)和定位導(dǎo)航運(yùn)算三大功能模塊。其基本組成如圖1所示:

2 GPS接收機(jī)的硬件設(shè)計(jì)
衛(wèi)星信號(hào)由天線接收,直接進(jìn)入射頻前端。射頻前端具有變頻作用,將射頻信號(hào)轉(zhuǎn)換為中頻信號(hào)。中頻信號(hào)經(jīng)采樣信號(hào)采樣、量化后,轉(zhuǎn)換為數(shù)字中頻信號(hào)。數(shù)字中頻信號(hào)進(jìn)入基帶數(shù)字處理器,基帶數(shù)字處理器完成衛(wèi)星信號(hào)的處理后,解調(diào)出導(dǎo)航電文,進(jìn)行相應(yīng)的處理后給出所需的定位信息或提供特定的應(yīng)用服務(wù)。
2.1 接收天線
接收天線是GPS接收機(jī)處理衛(wèi)星信號(hào)的首個(gè)器件,它將接收到的GPS衛(wèi)星所發(fā)射的電磁波信號(hào)轉(zhuǎn)變成電壓或電流信號(hào),以供接收機(jī)射頻前端攝取與處理。因?yàn)镚PS接收機(jī)賴以定位的信息基本上全部來(lái)自于天線接收到的GPS衛(wèi)星信號(hào),所以接收天線的性能直接影響著整個(gè)接收機(jī)的定位性能,它對(duì)接收機(jī)所起的作用與貢獻(xiàn)絕對(duì)不容忽視。
對(duì)GPS接收機(jī)天線的主要技術(shù)要求是:接收頻率為1575.42MHz的L1信號(hào);為了與接收到的GPS衛(wèi)星信號(hào)的極化方式相匹配,從而提高接收效率,接收天線以右旋圓極化的方式工作;強(qiáng)度微弱的GPS衛(wèi)星信號(hào)應(yīng)當(dāng)盡可能地先在緊靠天線的一端得到功率放大,以改善整個(gè)接收系統(tǒng)的噪聲性能,接收機(jī)采用內(nèi)置低噪聲放大器(LAN)的有源天線;電線饋線的阻抗為50 .綜上所述,本文采用靈敏度高的豎直形狀的四螺旋天線,且在工作時(shí)將天線采用外置的形式。
2.2 基于ATR0600的射頻前端電路設(shè)計(jì)
射頻(RF)前端模塊位于接收機(jī)天線與基帶數(shù)字信號(hào)處理模塊之間,它通過(guò)天線接收所有可見(jiàn)GPS衛(wèi)星信號(hào),經(jīng)前置濾波器和前置放大器的濾波放大后,再與本機(jī)振蕩器產(chǎn)生的正弦波本振信號(hào)進(jìn)行混頻而下變頻成中頻(IF)信號(hào),最后經(jīng)模數(shù)(A/D)轉(zhuǎn)換器將中頻信號(hào)離散成包含GPS信號(hào)成分的、頻率較低的數(shù)字中頻信號(hào),并在此過(guò)程中進(jìn)行必要的濾波和增益控制。
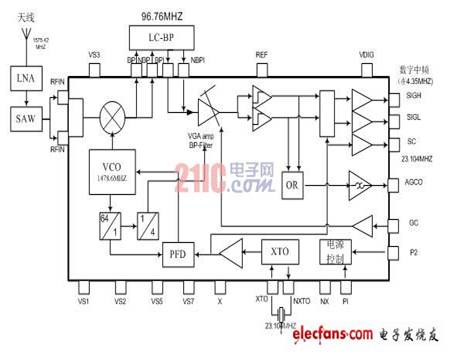
本設(shè)計(jì)中射頻前端主要由Atmel公司生產(chǎn)的ATR0600芯片及外圍濾波電路構(gòu)成,它是一個(gè)GPS接收機(jī)射頻前端IC芯片,采用單IF結(jié)構(gòu),芯片上包含有混頻器、IF放大器、2bit的模數(shù)轉(zhuǎn)換器(ADC)、晶體振蕩器等電路,芯片具有極高的集成度,很小的功耗(約50w)。
ATR0600通過(guò)外部的天線接收1575.42MHz的L1 GPS信號(hào),經(jīng)過(guò)低噪聲放大器LNA進(jìn)行第1級(jí)濾波、放大后,被外部SAW濾波器進(jìn)行鏡像抑制和對(duì)1800MHz GSM頻帶信號(hào)進(jìn)行隔離。該信號(hào)與基準(zhǔn)頻率為23.104 MHz的本振信號(hào)進(jìn)行混頻,混頻器將GPS信號(hào)下變頻到97.76MHz中頻。混頻后,該信號(hào)經(jīng)過(guò)LC帶通濾波器和可變益放大器(VGA),與片上集成的中頻帶通濾波器組合,完成對(duì)GSM干擾信號(hào)的濾波。VGA輸出驅(qū)動(dòng)集成的1.5bitA/D轉(zhuǎn)換器,將中頻信號(hào)轉(zhuǎn)化成4.35MHz的數(shù)字中頻信號(hào)。
ATR0600的內(nèi)部結(jié)構(gòu)及其電路應(yīng)用形式如圖2所示:
2.3 基于ATR0620的基帶處理器電路
基帶數(shù)字信號(hào)處理模塊是GPS接收機(jī)的核心部分,它通過(guò)處理射頻前端所輸出的數(shù)字中頻信號(hào),復(fù)制出與接收到的衛(wèi)星信號(hào)相一致的本地載波和本地偽碼信號(hào),從而實(shí)現(xiàn)對(duì)GPS信號(hào)的捕獲與跟蹤,并且從中獲得GPS偽距和載波相位等測(cè)量值以及解調(diào)出導(dǎo)航電文。
數(shù)字基帶信號(hào),是信源發(fā)出的、未經(jīng)調(diào)制或頻譜變換、直接在有效頻帶與信號(hào)頻譜相對(duì)應(yīng)的信道上傳輸?shù)臄?shù)字信號(hào),是消息代碼的電波形,是用不同的電平來(lái)或脈沖來(lái)表示相應(yīng)的消息代碼。數(shù)字基帶信號(hào)的類型很多,常見(jiàn)的有矩形脈沖,三角波、高斯脈沖和升余弦脈沖等。最常用的是矩形脈沖,因?yàn)榫匦蚊}沖易于形成和變換。
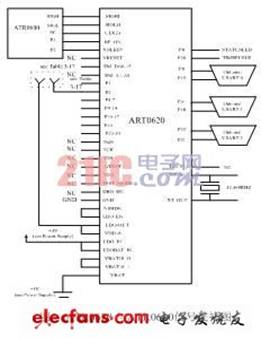
基帶數(shù)字信號(hào)處理模塊通常是硬件與軟件相結(jié)合的有機(jī)體,其中載波解調(diào)和C/A碼解擴(kuò)通常是由ASIC硬件形式的數(shù)字信號(hào)處理器來(lái)完成的,而在微處理器中運(yùn)行的跟蹤環(huán)路控制軟件通過(guò)計(jì)算來(lái)調(diào)節(jié)數(shù)字信號(hào)處理器的各種操作。由Atmel公司生產(chǎn)的ATR0620芯片包含有一個(gè)基于ARM7TDMI處理核的16通道相關(guān)器,它具有高性能的32bit RISC結(jié)構(gòu),使用16bit指令系統(tǒng),能利用ARM7TDMI微控制器核與片上RAM,完成GPS16通道相關(guān)器和外圍設(shè)備接口功能;利用芯片內(nèi)部大量的功能寄存器可以滿足實(shí)時(shí)控制應(yīng)用。
ATR0620外部接口及與ATR0600的信號(hào)連接如圖3所示。
2.4 GPS接收機(jī)的電路設(shè)計(jì)
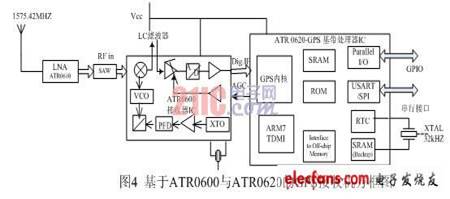
ATR0600射頻前端為ATR0620提供衛(wèi)星信號(hào),主時(shí)鐘信號(hào)和其它一些控制信號(hào),而ATR0620為ATR0600提供采樣信號(hào)。圖4為利用ATR0600和ATR0620芯片設(shè)計(jì)的GPS接收機(jī)方框圖。
2.5 存儲(chǔ)模塊及通信接口
選用Cypress公司生產(chǎn)的CY7C1041,由片選信號(hào)NSCS[I]選通來(lái)擴(kuò)展SRAM,容量為4 Mb.FLASH則選用ST公司的4Mb容量的SST39VF400芯片,由片選信號(hào)NSCS[0]選通。
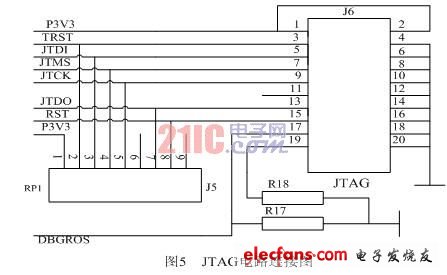
接收機(jī)中設(shè)計(jì)了兩種通信接口:一種是JTAG調(diào)試接口,連接JTAG仿真器進(jìn)行開(kāi)發(fā)調(diào)試,下載用戶程序;另一種是RS232通信串口,用于與主機(jī)通信。其中JTAG調(diào)試電路連接如圖5所示。
3 GPS接收機(jī)的軟件設(shè)計(jì)
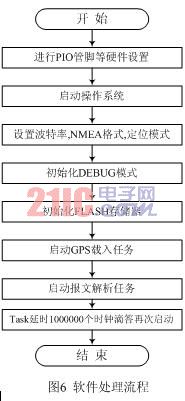
GPS的用戶設(shè)備主要由接收機(jī)硬件和處理軟件組成。用戶通過(guò)用戶設(shè)備接收GPS衛(wèi)星信號(hào),經(jīng)信號(hào)處理而獲得用戶位置、速度等信息,最終達(dá)到利用GPS進(jìn)行導(dǎo)航和定位的目的。GPS接收機(jī)軟件的結(jié)構(gòu)如圖6所示。程序包含兩部分:匯編語(yǔ)言程序部分(用于引導(dǎo)和系統(tǒng)初始化)和C語(yǔ)言應(yīng)用程序(用于主要的導(dǎo)航定位計(jì)算)。軟件整體采用并行任務(wù)結(jié)構(gòu),由相關(guān)器產(chǎn)生的累加數(shù)據(jù)IRQ中斷信號(hào)進(jìn)行任務(wù)切換的驅(qū)動(dòng),在中斷服務(wù)程序中更新偽碼、載波和數(shù)據(jù)解調(diào)環(huán)路。
GPS接收機(jī)的應(yīng)用軟件根據(jù)不同的用途而不同,主要包括:數(shù)據(jù)采集與分析、衛(wèi)星位置計(jì)算、時(shí)間推算、差分定位和動(dòng)態(tài)定位等程序。本設(shè)計(jì)的GPS接收機(jī)上的程序主要在ARM- CLinux交叉編譯環(huán)境下用C語(yǔ)言進(jìn)行編寫(xiě),通過(guò)ARM7 JTAG接口連接JAG仿真器進(jìn)行調(diào)試和移植。
4 結(jié)束語(yǔ)
本設(shè)計(jì)的GPS接收機(jī)采用內(nèi)嵌ARM7核的GP4020芯片作為接收機(jī)的數(shù)字基帶處理器,通過(guò)實(shí)驗(yàn)調(diào)試,消除了以往微處理器的瓶頸效應(yīng),具有體積小、功耗低、性能高的特點(diǎn)。實(shí)驗(yàn)PCB板尺寸:75 mmх50 mm xl2 mm;通道數(shù):16;功耗:小于0.1 W;首次定位時(shí)間:小于41 s(冷啟動(dòng)),小于2.5s(熱啟動(dòng));定位精度:3 m.