
1 引言
I2C (Inter-Integrated Circuit1總線是一種由Philips公司開發(fā)的2線式串行總線,,用于連接微控制器及其外圍設(shè)備,。它是同步通信的一種特殊形式,,具有接口線少、控制方式簡單,、器件封裝形式小,、通信速率較高等優(yōu)點(diǎn)。在主從通信中,,可有多個I2C總線器件同時接到I2C總線上,,通過地址來識別通信對象。筆者在開發(fā)基于MPC8250的嵌入式Linux系統(tǒng)的過程中發(fā)現(xiàn)I2C總線在嵌入式系統(tǒng)中應(yīng)用廣泛,,I2C總線控制器的類型比較多,,對系統(tǒng)提供的操作接口差別也很大。與I2C總線相連的從設(shè)備主要有微控制器,、EEPROM,、實(shí)時時鐘、A/D轉(zhuǎn)換器等.MPC8250處理器正是通過內(nèi)部的I2C總線控制器來和這些連接在I2C總線上的設(shè)備進(jìn)行數(shù)據(jù)交換的,。由于I2C總線的特性,,Linux的I2C總線設(shè)備驅(qū)動程序的設(shè)計者在設(shè)計驅(qū)動程序時采用了獨(dú)特的體系結(jié)構(gòu)。使開發(fā)I2C總線設(shè)備驅(qū)動程序與開發(fā)一般設(shè)備驅(qū)動程序的方法具有很大差別,。因此,,開發(fā)I2C總線設(shè)備驅(qū)動程序除了要涉及一般Linux內(nèi)核驅(qū)動程序的知識外。還要對I2C總線驅(qū)動的體系結(jié)構(gòu)有深入的了解,。筆者在開發(fā)過程中使用設(shè)備型號為AT24C01A的EEPROM 來測試I2C總線驅(qū)動,。
2 工作原理概述
在介紹I2C總線結(jié)構(gòu)之前。要搞清楚兩個概念:I2C總線控制器和I2C設(shè)備,。I2C總線控制器為微控制器或微處理器提供控制I2C總線的接口,,它控制所有I2C總線的特殊序列、協(xié)議,、仲裁,、時序,這里指MPC8250提供的I2C總線控制接口,。I2C設(shè)備是指通過I2C總線與微控制器或微處理器相連的設(shè)備,,如EEPROM、LCD驅(qū)動器等,,這里指EEPROM,。
在一個串行數(shù)據(jù)通道中.I2C總線控制器可以配置成主模式或從模式。開發(fā)過程中,,MPC8250的I2C總線控制器工作在主模式,,作為主設(shè)備;與總線相連的I2C設(shè)備為AT24C01A型EEPROM,,作為從設(shè)備,。主設(shè)備和從設(shè)備都可以工作于接收和發(fā)送狀態(tài),。總線必須由主設(shè)備控制,,主設(shè)備產(chǎn)生串行時鐘控制總線的傳輸方向,,并產(chǎn)生起始和停止條件。
2.1 I2C總線控制器
I2C使用由串行數(shù)據(jù)線SDA 和串線時鐘線SCL組成的兩線結(jié)構(gòu)來在外部集成電路與控制器之間交換數(shù)據(jù),。MPC8250的I2C總線控制器包括發(fā)送和接收單元,、一個獨(dú)立的波特率發(fā)生器和一個控制單元。發(fā)送和接收單元使用相同的時鐘信號,,如果I2C為主設(shè)備,。那么時鐘信號由I2C的波特率發(fā)生器產(chǎn)生;如果I2C為從設(shè)備,,時鐘信號則由外部提供,。
SDA和SCL為雙向的,通過外部+3.3 V上拉電阻連接至正向電壓,。當(dāng)總線處于空閑狀態(tài)時,,SDA和SCL都應(yīng)是高電平,I2C通常的配置模式如圖1所示,。

圖1 I2C配置模式
I2C的接收和發(fā)送單元均為雙緩存,,在數(shù)據(jù)發(fā)送時,數(shù)據(jù)從發(fā)送數(shù)據(jù)寄存器到移位寄存器,,以時鐘速率輸出到SDA線,;在數(shù)據(jù)接收時,數(shù)據(jù)從SDA線進(jìn)入移位寄存器,,然后進(jìn)入接收寄存器,。
2.2 I2C總線控制器和EEPROM 的基本操作
I2C總線在傳送數(shù)據(jù)過程中共有3種類型的信號,,分別是:開始信號,、結(jié)束信號和應(yīng)答信號。
開始信號:SCL為高電平時,,SDA 由高電平向低電平跳變,,開始傳送數(shù)據(jù);
結(jié)束信號:SCL為高電平時,,SDA由低電平向高電平跳變,,傳送數(shù)據(jù)結(jié)束;
應(yīng)答信號:接收數(shù)據(jù)的設(shè)備在接收到一個字節(jié)數(shù)據(jù)后,, 向發(fā)送數(shù)據(jù)的設(shè)備發(fā)出特定的低電平脈沖,。表示已收到數(shù)據(jù)。
當(dāng)MPC8250的I2C總線空閑時,,其SDA和SCL均為高電平,,主設(shè)備通過發(fā)送一個開始信號啟動發(fā)送過程,。這個信號的時序要求是當(dāng)SCL為高時,SDA出現(xiàn)一個由高到低的電平跳變,。在起始條件之后,。必須是從設(shè)備的地址字節(jié),其中高4位為器件類型識別符(不同的芯片類型有不同的定義,,EEPROM一般應(yīng)為1010),,接著3位為片選,最后1位為讀寫位,,當(dāng)為1時為讀操作,,為0時為寫操作,如圖2所示,。

圖2 EEPROM設(shè)備地址字節(jié)結(jié)構(gòu)
如果主設(shè)備要向EEPROM 中寫數(shù)據(jù),,在地址字節(jié)中主設(shè)備向EEPROM發(fā)出一個寫請求(R/W=0),發(fā)送的地址字節(jié)之后緊跟著要發(fā)送的數(shù)據(jù),。每發(fā)送一個字節(jié)的數(shù)據(jù)后EEPROM就會產(chǎn)生一個應(yīng)答信號,,主設(shè)備也會監(jiān)控應(yīng)答信號,如果在發(fā)送一個字節(jié)后EEPROM沒有返回應(yīng)答信號,,則主設(shè)備就會停止發(fā)送,,并生成一個結(jié)束信號。寫操作的時序如圖3所示,。
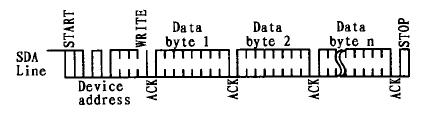
圖3 I2C主設(shè)備寫操作時序
要從EEPROM 中讀取數(shù)據(jù)時,,應(yīng)設(shè)置R/W=1。在EEPROM發(fā)送完一個字節(jié)的數(shù)據(jù)后,,主設(shè)備產(chǎn)生一個應(yīng)答信號來響應(yīng),,告知EEPROM主設(shè)備要求更多的數(shù)據(jù),對應(yīng)主設(shè)備產(chǎn)生的每個應(yīng)答信號EEPROM將發(fā)送一個字節(jié)的數(shù)據(jù),。當(dāng)主設(shè)備不發(fā)送應(yīng)答信號并隨后發(fā)送結(jié)束信號位時結(jié)束此操作,。讀操作的時序如圖4所示。

圖4 I2C主設(shè)備讀操作時序
3 Linux中I2C總線驅(qū)動體系結(jié)構(gòu)
在Linux系統(tǒng)中,,對于一個給定的I2C總線硬件配置系統(tǒng),,I2C總線驅(qū)動程序體系結(jié)構(gòu)由I2C總線驅(qū)動和I2C設(shè)備驅(qū)動組成。其中I2C總線驅(qū)動包括一個具體的控制器驅(qū)動和I2C總線的算法驅(qū)動,。一個算法驅(qū)動適用于一類總線控制器,。而一個具體的總線控制器驅(qū)動要使用某一種算法。例如,,Linux內(nèi)核中提供的算法i2e-algo-8260可以用在MPC82xx系列處理器提供的I2C總線控制器上,。Linux內(nèi)核中提供了一些常見處理器如MPC82xx系列的算法驅(qū)動。對于I2C設(shè)備,基本上每種具體設(shè)備都有自己的基本特性,。其驅(qū)動程序一般都需要特別設(shè)計,。
在I2C總線驅(qū)動程序體系結(jié)構(gòu)中。使用數(shù)據(jù)結(jié)構(gòu)Driver來表示I2C設(shè)備驅(qū)動,,使用數(shù)據(jù)結(jié)構(gòu)Client表示一個具體的I2C設(shè)備,。而對于I2C總線
控制器,各種總線控制器在進(jìn)行數(shù)據(jù)傳輸時采用的算法有好多種,,使用相同算法的控制器提供的控制接口也可能不同,。在I2C總線驅(qū)動程序體系結(jié)構(gòu)中,用數(shù)據(jù)結(jié)構(gòu)Algorithm來表示算法,,用數(shù)據(jù)結(jié)構(gòu)Adapter來表示不同的總線控制器,。Linux內(nèi)核的I2C總線驅(qū)動程序體系結(jié)構(gòu)如圖5所示。

圖5 Linux內(nèi)核I2C總線驅(qū)動程序體系結(jié)構(gòu)
在圖5中,,一個Client對象對應(yīng)一個具體的I2C總線設(shè)備,,而一種I2C設(shè)備的Driver可以同時支持多個Client。每個Adapter對應(yīng)一個具體的I2C總線控制器,。不同的I2C總線控制器可以使用相同的算法Algorithm,。i2c-core是I2C總線驅(qū)動程序體系結(jié)構(gòu)的核心,在這個模塊中,,除了為總線設(shè)備驅(qū)動提供了一些統(tǒng)一的調(diào)用接口來訪問具體的總線驅(qū)動程序功能,,以進(jìn)行讀寫或設(shè)置操作外,還提供了將各種支持的總線設(shè)備驅(qū)動和總線驅(qū)動添加到這個體系中的方法,,以及當(dāng)不再使用這些驅(qū)動時將其從體系中刪除的方法,。i2c-core將總線驅(qū)動程序體系一分為二,相互獨(dú)立,??梢葬槍δ硞€I2C總線設(shè)備來設(shè)計一個I2C設(shè)備驅(qū)動程序,而不需要關(guān)心系統(tǒng)的I2C總線控制器是何種類型,,所以提高了其可移植性,。另一方面,在設(shè)計I2C總線驅(qū)動時也可以不要考慮其將用來支持何種設(shè)備,。因為i2c-core提供了統(tǒng)一的接口,,所以也為設(shè)計這兩類驅(qū)動提供了方便。
4 開發(fā)實(shí)例
Linux內(nèi)核已經(jīng)提供了I2C驅(qū)動中所需要的基本模塊,。i2c-core、i2c-dev和i2c-proc是總線控制器和I2C設(shè)備所需要的核心模塊,。對于MPC8250處理器,,內(nèi)核中還有MPC8260的算法模塊i2c-algo-8260,它也適用于MPC8250的I2C控制接口。這些模塊程序在默認(rèn)條件下是不會被編譯到內(nèi)核里的,,所以需要在配置Linux內(nèi)核時把這些模塊選中,。在筆者的開發(fā)中需要實(shí)現(xiàn)的是I2C總線控制器驅(qū)動和I2C設(shè)備EEPROM驅(qū)動。
4.1 I2C總線控制器驅(qū)動的設(shè)計
MPC8250的I2C總線驅(qū)動程序由i2c-algo-8260算法模塊和MPC8250具體的I2C總線控制器驅(qū)動組成,。其中i2c-algo-8260算法模塊已經(jīng)在內(nèi)核中實(shí)現(xiàn),,所以主要實(shí)現(xiàn)FC總線控制器驅(qū)動。
i2c-algo-8260算法模塊主要用來描述MPC82xx處理器如何在I2C總線上傳輸數(shù)據(jù),。該模塊中主要實(shí)現(xiàn)了MPC82xx處理器上I2C總線的初始化,、讀寫、ioctl控制和中斷請求等功能,。另外,,還有i2c_8260_add_bus和i2c_8260_del_bus兩個函數(shù),它們是使用這個算法的Adapter初始化時和退出時調(diào)用的函數(shù),,用來注冊和注銷一個總線控制器,,需要從模塊導(dǎo)出。這些函數(shù)功能都被封裝在一個i2c-algorithm結(jié)構(gòu)中,,傳遞給使用這個算法的Adapter,。算法模塊中這些函數(shù)需要調(diào)用特定控制器模塊中的函數(shù)來實(shí)現(xiàn)具體的操作。
在I2C總線控制器驅(qū)動模塊中主要要實(shí)現(xiàn)兩個結(jié)構(gòu)體i2c_adapter和i2c_algo_8260_data,,定義這兩個結(jié)構(gòu)中的函數(shù)指針成員,。并且用己經(jīng)初始化好的i2c_algo_826o_data結(jié)構(gòu)來初始化struct i2c_adapter結(jié)構(gòu)的algo_data成員變量。其中,,定義i2e_algo_8260_data結(jié)構(gòu)為:
struct i2c_algo_8260_data rw8250_data={
setisr:rw8250_install_isr
},;
這里的成員變量rw8250_install__isr提供了MPC8250的I2C總線控制器向內(nèi)核申請中端請求的功能。結(jié)構(gòu)體i2c_adapter定義如下:
struct i2c_adapter rw8250_ops={“rw8250”,,I2C_HW_
MPC8250_RW8250,,NULL,&rw8250_data,,rw8250_inc_use,,rw8250_dec_use,rw8250_reg,,rw8250_unreg,,};
其中,,“rw8250”是該總線控制器的標(biāo)識名,,宏名I2C_HW_MPC8250_RW8250定義了內(nèi)核中注冊該適配器的ID號,而成員函數(shù)rw8250_inc_use和rw8250_dec_use用來增加和減少內(nèi)核使用該模塊的次數(shù),。
另外,,該模塊還要完成一個注冊模塊時的初始化函數(shù)rw8250_iic_init,,在該函數(shù)中要初始化I2C控制器使用的通用端口號PortD14、PortD15,,并在雙端口RAM 中為發(fā)送和接受數(shù)據(jù)的緩沖區(qū)分配空間,。函數(shù)rw8250_iic_init在進(jìn)行模塊初始化時將被init_module調(diào)用。
總之,。I2C控制器模塊中設(shè)計的這些函數(shù)都是為i2c_algo_8650算法模塊服務(wù)的,。最后需要封裝在i2c-adapter結(jié)構(gòu)中。通過i2c_algo_8260_data算法模塊中輸出的接口函數(shù)傳遞給算法模塊,。
4.2 I2C設(shè)備驅(qū)動的設(shè)計
I2C設(shè)備EEPROM 驅(qū)動除了要根據(jù)EEPROM的具體特性進(jìn)行設(shè)計外,。還要考慮I2C總線驅(qū)動程序體系結(jié)構(gòu)的特性。在EEPROM設(shè)備驅(qū)動程序中需要實(shí)現(xiàn)一個i2c_driver結(jié)構(gòu),。每個對應(yīng)于具體設(shè)備的Client都從這個結(jié)構(gòu)來構(gòu)造,。在i2c_driver結(jié)構(gòu)中有兩個函數(shù)attach_adapter和detach_client必須要實(shí)現(xiàn)。i2c_driver結(jié)構(gòu)的定義如下:
struct i2c_driver eeprom_driver = {
/*name*/ “I2C_EEPROM_DRIVER”,,/*id*/I2C_DRIVERID_EEPROM,,
/*flags*/ I2C_DF_NOTIFY,/*attach_ adapter*/&eeprom_attach_adapter,,/*detach_client */&eeprom_detach_client,,
/*command*/&eeprom_command,/*inc_use*/ &eeprom_inc_use,,/*dec_use*/ &eeprom_dec_use
},;
在設(shè)備驅(qū)動中。向EEPROM 寫數(shù)據(jù)通過調(diào)用i2c-core提供的i2c_master_send函數(shù)來完成,。從EEPROM 讀取數(shù)據(jù)通過另一個函數(shù)i2c_master_read來完成,。與一般設(shè)備驅(qū)動不同的地方就是在EEPROM驅(qū)動模塊初始函數(shù)中要調(diào)用i2c-core提供的i2c_add_driver函數(shù)來注冊該設(shè)備。在模塊退出函數(shù)中調(diào)用i2c_del_driver函數(shù)來注銷該設(shè)備,。
5 結(jié)束語
I2C總線具有控制簡單,、通信速率高等優(yōu)點(diǎn),作為一種2線雙向同步串行數(shù)據(jù)總線,,它為嵌入式系統(tǒng)設(shè)計提供了一種完善的集成電路間的串行總線擴(kuò)展技術(shù),,大大簡化了應(yīng)用系統(tǒng)的硬件設(shè)計,為實(shí)現(xiàn)應(yīng)用系統(tǒng)的模塊化設(shè)計創(chuàng)造了極為有利的條件,。同時,,在很多情況下需要對系統(tǒng)中的某些動態(tài)信息進(jìn)行掉電保護(hù)。在數(shù)據(jù)量不太大的場合下,,通過I2C總線連接的EEPROM在這方面就比較能發(fā)揮作用,。而Linux作為一種新的操作系統(tǒng),目前在嵌入式系統(tǒng)中的應(yīng)用非常廣泛,。其發(fā)展前景無法估量,。由于Linux源碼開放,,且非常易于移植,,為其編寫設(shè)備驅(qū)動程序相對容易,。本文介紹了Linux下I2C總線EEPROM驅(qū)動程序的一般設(shè)計方法。