
1.1 系統(tǒng)各模塊方案的選擇與論證
(1)電機驅動模塊。采用L298驅動芯片組成驅動電路,可以通過控制中心輸出的高低電平對電動機的方向進行控制,并且可以通過PWM波直接控制電動機的速度。電路較為簡 ~單,容易實現(xiàn),驅動能力和抗干擾能力強,性價比高。
(2)LED燈電流調節(jié)與光源檢測模塊。發(fā)射端通過直流穩(wěn)壓電源來點亮白光LED,通過調節(jié)白光LED兩端的電壓來調節(jié)電流從而調節(jié)亮度,接收端采用多個光敏電阻,通過光敏電阻阻值的變化來判斷光源的位置。
(3)LED電流檢測模塊。在LED的下端串聯(lián)一0.1Ω的電阻,電阻的另一端接地,采用OPA335精密放大器對0.1 Ω電阻的壓降進行放大,再通過AD采樣處理,從而測量計算出流過LED的電流。
1.2 系統(tǒng)組成
本系統(tǒng)采用兩片TI公司的MSP430F149單片機分別作為發(fā)送部分和接受部分的控制核心,完成信號發(fā)送和接收、電流檢測、控制電機、鍵盤輸入及液晶顯示等功能。MSP430F149單片機內(nèi)部資源豐富,集成了A/D模塊,無需擴展引腳,電路設計和制作簡單,功耗低。
外圍電路模塊包括:電機驅動模塊、LED控制模塊、電流檢測模塊、光信號的發(fā)射與接收模塊和液晶顯示模塊。

2 理論分析與硬件電路設計
2.1 LED控制和電流檢測電路
LED通過調節(jié)LED兩端的電壓,來改變電流,從而實現(xiàn)亮度的調節(jié),可將LED控制電路采用分壓的方式,將LED與一個1OΩ的電阻串聯(lián)來對LED分壓,通過調節(jié)串聯(lián)電路電壓來調節(jié)電流,控制LED的亮度。經(jīng)過計算:
![]()
即10Ω 電阻的功率最大值將近1.6W。故10Ω 電阻采用3W的功率電阻。
電壓調整采用LM317,其輸出電壓范圍為:

即可調范圍為4.0 V到8.4V,換算成電流為:
即電流范圍可達80~440 mA,可滿足在150-350 mA的范圍內(nèi)調節(jié)要求。
電流檢測模塊通過測量電路中已知電阻兩端電壓來換算出電流,由于用來測量電壓的電阻阻值要盡量小,故選擇0.1Ω 的功率電阻,并聯(lián)的放大器等效電阻可忽略不記,經(jīng)過計算,0.1 Ω 電阻兩端的壓降在0.008 V~0.042 V之間,電壓值非常小,需要經(jīng)過一級電壓放大電路。由于單片機的AD采樣內(nèi)部參考電壓最大值為3.3 V,因此放大后電壓值3.3V以內(nèi)。
電壓放大采用TI公司的軌到軌運算放大器0PA335,該運放具有良好的電壓放大性能,單電源供電,放大直流信號沒有衰減,連接為同相比例放大。0PA335的輸出接單片機的模擬信號輸入端P6.0,進行AD采樣。電路如圖2所示。
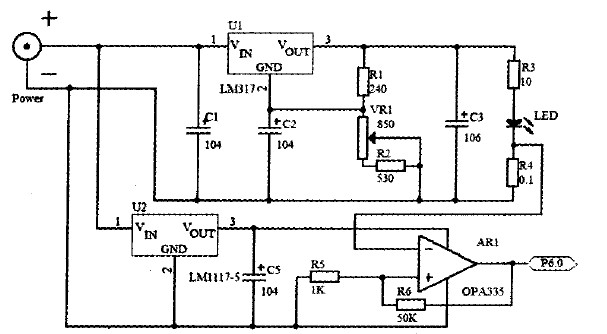
圖2 電流調節(jié)與檢測電路
2.3 電機驅動電路
由于采用步進減速電機,電流較大。
經(jīng)過測量,在7V電壓供電時,電機的電流為1.4A,在5v供電時,電流為0.9 A,系統(tǒng)采用7.2 V的干電池供電,電機驅動芯片需要能夠承受較大的電流。故采用L298作為電機驅動,能承受足夠大的電流。
2.4 檢測光源電路
檢測光源電路的主要原理是通過檢測到光敏電阻的電阻變化,從而引起電壓的變化,單片機通過識別不同的電壓信號來控制電機的轉動。本設計還采用套黑管的方法提高精確度。
將LM324用做電壓比較器,LM324的反向輸入端通過兩個相等的電阻將電源的電壓分半,作為反向輸入端的輸入電壓,在同向輸入端同樣采用分壓的原理,上端連接光敏電阻,下端接一個100K的滑動變阻器來調節(jié)光敏電阻的靈敏度。電路如圖3所示。
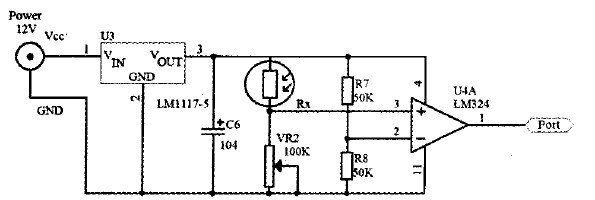
圖3 檢測光源電路
3 控制算法與軟件設計
系統(tǒng)軟件主要分為3個部分:檢測光源、檢測顯示電流、步進電機控制。算法設計也圍繞這3個方面展開。
3.1 控制算法
水平方向用4個光敏電阻來尋找和跟蹤光源,將光敏電阻接入比較器串聯(lián)滑動變阻器,接在LM324輸入端,單片機通過電平變化來判斷光源的具體位置。
在沒有檢測到光時,兩個比較器都輸出低電平,當有一個檢測到光時,與此相連的比較器輸出變?yōu)楦唠娖剑攦蓚€比較器的輸出都為高電平時,說明此時光源在兩個光敏電阻之間,此時已檢測到光源的中心,控制電機停止。
在光源跟蹤時,通過判斷水平方向兩個比較器的狀態(tài)來實現(xiàn)。當左邊的比較器輸出為高電平,右邊輸出低電平時,說明光源左移,控制步進電機左移。同理可控制電機右移。當兩個比較器輸出都為高電平時,說明光源在中心,不用移動。當兩個比較器都輸出低電平時,都沒檢測到光源,此時重新掃描。
由于要實現(xiàn)激光筆對準光源時,將光源支架沿著直線LM平穩(wěn)緩慢(15秒內(nèi))移動60 cm,激光筆能夠連續(xù)跟蹤指向光源,而系統(tǒng)采用的減速步進電機可將一個圓周細分為4096步,每個脈沖走的距離約為:
![]()
每個脈沖步進3.07 mm,可實現(xiàn)對光源的連續(xù)跟蹤。要實現(xiàn)將光源支架沿著直線LM平穩(wěn)緩慢(15秒內(nèi))移動60cm,激光筆能夠連續(xù)跟蹤指向光源,當沿直線移動時,光源的豎直高度將發(fā)生變化,豎直方向檢測方式類似于水平方向檢測跟蹤,因而可實現(xiàn)整個平面內(nèi)跟蹤。
3.2軟件設計流程圖

圖4 單片機2流程圖
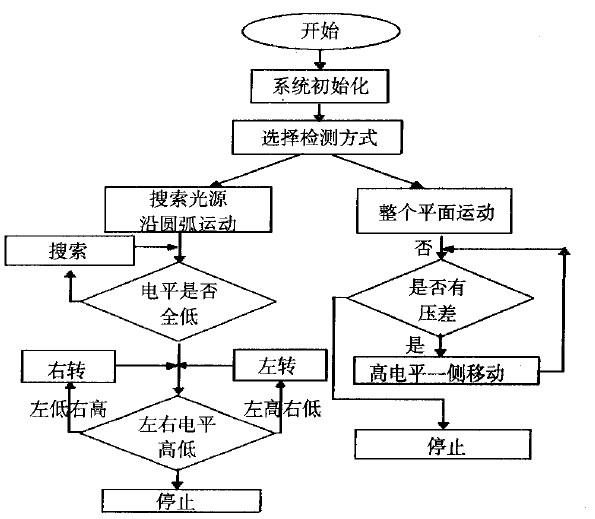
圖5 單片機1流程圖