
文獻(xiàn)標(biāo)識碼: A
文章編號: 0258-7998(2012)02-0134-04
H.264是新一代視頻壓縮編碼標(biāo)準(zhǔn)[1],運(yùn)動估計(jì)是視頻壓縮編碼中的一個關(guān)鍵部分。在H.264整個編碼過程中,運(yùn)動估計(jì)在編碼時間中占據(jù)了相當(dāng)大的比例,因此,縮短運(yùn)動估計(jì)時間是一個非常重要的環(huán)節(jié)。為了減少運(yùn)動估計(jì)的時間,近年來國內(nèi)外學(xué)者針對運(yùn)動估計(jì)提出了很多經(jīng)典的搜索算法,如全局搜索算法(FS)、三步搜索算法(TSS)、新三步搜索算法(NTSS)、四步搜索算法(FSS)、菱形搜索算法(DS)、六邊形搜索算法(HS)、非對稱十字型多層次六邊形搜索算法(UMHexagonS)[2-3]。其中,UMHexagonS算法結(jié)合了其他算法的部分優(yōu)點(diǎn),在保證較好的率失真性能情況下,與FS算法比較,節(jié)省了90%以上的運(yùn)算量。雖然如此,但對該算法的分析發(fā)現(xiàn),UMHexagonS還存在一些不足,搜索點(diǎn)數(shù)較多,搜索范圍較大,運(yùn)算復(fù)雜度高,增長了編碼時間,影響了編碼效率。為了解決以上問題,本文提出了以下改進(jìn)方案:
(1)設(shè)定閾值,在搜索過程中SAD值達(dá)到滿意的情況下提前終止搜索。
(2)采用高精度的起始點(diǎn)預(yù)測,得到起始點(diǎn)的最佳預(yù)測運(yùn)動矢量。
(3)采用搜索模塊象限區(qū)域分割法,在原算法的基礎(chǔ)上減少了一半以上的搜索點(diǎn)數(shù)。
1 UMHexagonS算法介紹
(1)起始搜索點(diǎn)的預(yù)測:利用高精度的起始點(diǎn)預(yù)測,計(jì)算得出預(yù)測運(yùn)動矢量MVpred。
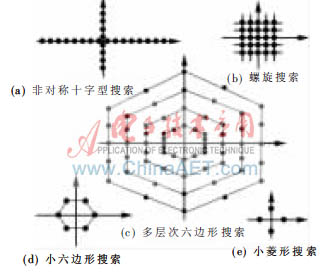
(2)非對稱十字型模板搜索,如圖1(a)所示。
(3)螺旋模板搜索,以步驟(2)搜索的匹配點(diǎn)作為搜索中心,搜索坐標(biāo)[-2,2]正方形區(qū)域內(nèi)的25個候選點(diǎn),類似于全局搜索,如圖1(b)所示。
(4)大六邊形多層次模板搜索,如圖1(c)所示。
(5)以步驟(4)搜索的匹配點(diǎn)作為搜索中心,進(jìn)行中小六邊形模板搜索,如圖1(d)所示。
(6)小菱形模板反復(fù)搜索,如圖1(e)所示,搜索得到最佳的匹配點(diǎn)。
2 UMHexagonS算法的改進(jìn)方案
2.1 起始搜索點(diǎn)的預(yù)測
起始搜索點(diǎn)的預(yù)測包括空間域預(yù)測方式和時間域兩種預(yù)測方式。其中空間域預(yù)測方式包括運(yùn)動矢量中值預(yù)測MP和上層塊模式運(yùn)動矢量預(yù)測UP;時間域預(yù)測方式包括前幀對應(yīng)塊運(yùn)動矢量預(yù)測CP和時間域的鄰近參考幀運(yùn)動矢量預(yù)測NRP。根據(jù)運(yùn)動矢量中心偏移特性[4],原點(diǎn)也被設(shè)為一個候選點(diǎn)預(yù)測,稱為原點(diǎn)預(yù)測ZP。在基于塊匹配算法的運(yùn)動估計(jì)中,宏塊分為7種塊模式,即16×16、16×8、8×16、8×8、8×4、4×8及4×4。由于同種預(yù)測方法針對不同的宏塊,起始點(diǎn)的預(yù)測精度不一樣,因此本文結(jié)合MP、UP、CP、NRP這四種方式采用了一種混合時空域預(yù)測方式[5]進(jìn)行起始點(diǎn)的預(yù)測, 針對不同的宏塊模式采用不同的預(yù)測方式, 可使起始點(diǎn)的預(yù)測精度更高。
2.2 搜索模塊象限區(qū)域分割法
由上述UMHexagonS搜索過程得知,該搜索算法在搜索過程中,搜索的候選點(diǎn)數(shù)較多,可以通過一些改進(jìn)的方法減少搜索點(diǎn)數(shù)。本文采用了搜索模塊象限區(qū)域分割法,根據(jù)參考文獻(xiàn)[6]中得知預(yù)測運(yùn)動矢量和最佳運(yùn)動矢量落入某同一象限的平均概率在95%以上,準(zhǔn)確度很高。因此,利用混合時空域起點(diǎn)預(yù)測方法,可找到起始點(diǎn)的運(yùn)動矢量方向,由于起點(diǎn)運(yùn)動矢量方向和最佳運(yùn)動矢量方向所落入的象限范圍基本一致,所以在后面的搜索階段只需要在一個約定的象限區(qū)域內(nèi)進(jìn)行搜索,其他3/4的區(qū)域都不用搜索,這樣可以大大減少搜索點(diǎn)數(shù)和節(jié)省搜索時間。
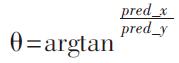
如圖2所示,整個宏塊可劃分為4個象限區(qū)域,分別是A1、A2、A3、A4,如果將當(dāng)前宏塊運(yùn)動估計(jì)的起始點(diǎn)的最佳預(yù)測運(yùn)動矢量記為MVpred(pred_x,pred_y),則通過該運(yùn)動向量計(jì)算得出:
 (1)
(1)
由式(1)可判斷得出預(yù)測運(yùn)動矢量方向落入在哪個象限內(nèi):
If: sinθ>0 && cosθ>0 MVpred∈A1
If: sinθ>0 && cosθ<0 MVpred∈A2
If: sinθ<0 && cosθ<0 MVpred∈A3
If: sinθ<0 && cosθ>0 MVpred∈A4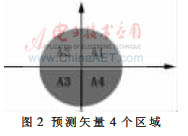 由圖2給出的4種不同的運(yùn)動矢量所屬象限的劃分,以及式(1)和式(2)的判斷,得知對原UMHexagonS算法的非對稱十字型模板搜索、螺旋模板搜索、大六邊形模板搜索,六邊形模板搜索和菱形模板搜索進(jìn)行象限區(qū)域劃分,如圖3所示。
由圖2給出的4種不同的運(yùn)動矢量所屬象限的劃分,以及式(1)和式(2)的判斷,得知對原UMHexagonS算法的非對稱十字型模板搜索、螺旋模板搜索、大六邊形模板搜索,六邊形模板搜索和菱形模板搜索進(jìn)行象限區(qū)域劃分,如圖3所示。
圖3 改進(jìn)后的搜索模塊
以16×16搜索范圍為例,只搜索一個象限區(qū)域,從圖3(a)可以看出,原搜索算法需要搜索24個候選點(diǎn),優(yōu)化改進(jìn)后,搜索點(diǎn)數(shù)只有原搜索算法的一半,將該改進(jìn)后的搜索方法記為P1。圖3(b)中,原搜索算法需要搜索25個候選點(diǎn),改進(jìn)模板后只需要搜索9個點(diǎn),將該改進(jìn)后的搜索方法記為P2。圖3(c)中,原搜索算法需要搜索64個候選點(diǎn),改進(jìn)后只需要搜索20個點(diǎn),將該改進(jìn)后的搜索方法記為P3。圖3(d)中,原搜索算法需要搜索6個候選點(diǎn),改進(jìn)后只需要搜索2個點(diǎn),將該改進(jìn)后的搜索方法記為P4。圖3(e)原搜索算法需要搜索4個候選點(diǎn),改進(jìn)后只需要搜索2個點(diǎn),將該改進(jìn)后的搜索方法記為P5。優(yōu)化及改進(jìn)后的各種搜索模塊平均節(jié)省了一半以上的搜索點(diǎn)數(shù),因此,采用搜索模板象限區(qū)域分割法可以大大減少搜索點(diǎn)數(shù)。
2.3 搜索提前終止策略
提前終止搜索策略的方法是設(shè)定閾值,在保證率失真的情況下,設(shè)定合理的閾值T可以較好地節(jié)省搜索時間。在H.264標(biāo)準(zhǔn)中采用塊匹配準(zhǔn)則方式計(jì)算搜索點(diǎn)的最小絕對差值和(SAD),如果SAD值小于或等于設(shè)定的閾值T,則提前結(jié)束搜索。由于宏塊支持7種分塊模式,各種塊模式的平均SAD值各有不同,為了減少計(jì)算量,可以根據(jù)不同塊模式的需要,設(shè)定7個不同的閾值。
2.4 算法改進(jìn)的具體流程
(1)首先,進(jìn)行混合時空域起始搜索點(diǎn)的預(yù)測,判斷該起始點(diǎn)SAD值,如果小于閾值T,則轉(zhuǎn)入步驟(7),否則,轉(zhuǎn)入步驟(2)。
(2)通過式(1)和式(2)計(jì)算后得到預(yù)測運(yùn)動矢量方向落入所屬的象限區(qū)域,并采用P1的方法進(jìn)行搜索,判斷各候選點(diǎn)SAD值,如果小于閾值T,則轉(zhuǎn)入步驟(7),否則,轉(zhuǎn)入步驟(3)。
(3)以步驟(2)最小候選點(diǎn)為中心,在預(yù)測的象限區(qū)域內(nèi)采用P2的方法進(jìn)行搜索,判斷各候選點(diǎn)SAD值,如果小于閾值T,則轉(zhuǎn)入步驟(7),否則,轉(zhuǎn)入步驟(4)。
(4)在預(yù)測的象限區(qū)域內(nèi)采用P3的方法進(jìn)行搜索,判斷各候選點(diǎn)SAD值,如果小于閾值T,則轉(zhuǎn)入步驟(7),否則,轉(zhuǎn)入步驟(5)。
(5)以步驟(4)最小候選點(diǎn)為中心,在預(yù)測的象限區(qū)域內(nèi)采用P4的方法進(jìn)行反復(fù)搜索,判斷各候選點(diǎn)SAD值,如果小于閾值T,則轉(zhuǎn)入步驟(7),否則,轉(zhuǎn)入步驟(6)。
(6)在預(yù)測的象限區(qū)域內(nèi)采用P5的方法進(jìn)行反復(fù)搜索。
(7)找到最佳匹配點(diǎn),結(jié)束搜索。
算法改進(jìn)后具體流程如圖4所示。
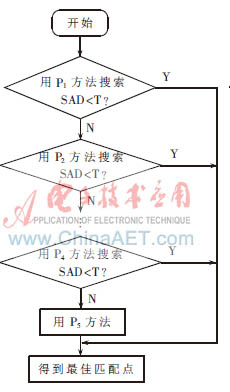
圖4 UMHexagonS算法改進(jìn)流程圖
3 仿真實(shí)驗(yàn)結(jié)果與分析
3.1 仿真實(shí)驗(yàn)平臺與配置
為了測試改進(jìn)后的算法,本文在VC++6.0的平臺上,將H.264標(biāo)準(zhǔn)測試JM10.2[7]集成到平臺上進(jìn)行了算法改進(jìn)后的測試。實(shí)驗(yàn)所用PC機(jī)的硬件配置如下:Windows XP,CPU 2.80 GHz,內(nèi)存為2 GB。選用的測試序列集為5個176×144的QCIF格式序列,所有序列都為Yuv4:2:0。采用baseline編碼,編碼器主要參數(shù)配置為FramesToBeEncoded=100,F(xiàn)rameRate=30.0,UseHadamard=1,SearchRange=16,NumberReferenceFrames=5,其他參數(shù)為默認(rèn)值。
3.2 實(shí)驗(yàn)結(jié)果與分析
算法改進(jìn)前、后仿真實(shí)驗(yàn)數(shù)據(jù)對照如表1所示。
算法改進(jìn)前、后實(shí)驗(yàn)數(shù)據(jù)對比及變化如表2所示。
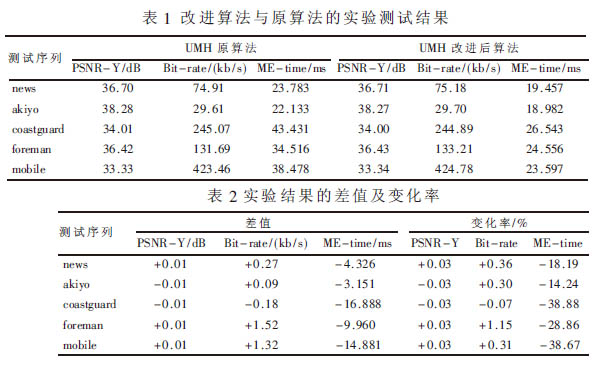
從表2的實(shí)驗(yàn)數(shù)據(jù)中可以發(fā)現(xiàn),改進(jìn)后的算法與原算法相比,PSNR值的變化不超過0.01dB,誤碼率的增加率最大不超過1.2%,然而運(yùn)動估計(jì)時間卻減少了14%~38%。其中,對于運(yùn)動比較緩慢的序列news和akiyo而言,搜索速度提高了14.24%和18.19%,對于中度運(yùn)動foreman序列,提高了28.86%,對于劇烈運(yùn)動的序列coastguard和mobile而言,提高了38.88%和38.67%。從而可以看出,改進(jìn)后的算法相對于原算法,搜索速度隨運(yùn)動序列劇烈強(qiáng)度的增加而提高。因此,本文算法在保證編碼性能的基礎(chǔ)上,可以大幅地減少原算法的運(yùn)動估計(jì)時間,整體上提高編碼效率。
本文通過對運(yùn)動估計(jì)UMHexagonS進(jìn)行了分析和研究,針對該算法提出了一些改進(jìn),通過混合時空域高精度的起始點(diǎn)預(yù)測,引入預(yù)測運(yùn)動矢量方向性判別搜索區(qū)域從而降低搜索點(diǎn)數(shù),設(shè)定閾值提前終止搜索。從實(shí)驗(yàn)結(jié)果可以發(fā)現(xiàn),本文算法在PSNR和碼率與原算法相近的情況下,運(yùn)動估計(jì)時間得到大幅降低。因此,本文的改進(jìn)算法與原算法相比,具有明顯的優(yōu)勢。
參考文獻(xiàn)
[1] WIEGAND T, SULIVAN G J, LUTHRA A. Draft ITU-Trecommendation H.264 and final draft international standard 14496-10 AVC[R]. JVT of ISO/IEC JTC1/SC29/WG11 and ITU-T SG16/Q.6,Doc.JVT G050r1, Geneva, Switzerland,May 2003.
[2] Yang Peng,He Yuwen, Yang Shiqiang. An unsymmetrical-cross multi-resolution motion search aigorithm for Mpeg4-Avcm. 264 coding[R]. IEEE International Conference on Multimedia and Expo(ICME),2004:531-534.
[3] Yang Peng, Wu Hua, Yang Shiqiang. Fast motion estimation algorithm for H.264[J]. Journal of Tsinghua University (Science and Technology),2005,45(4):527-531.
[4] 李會宗,陳雷霆,盧光輝,等.基于起點(diǎn)預(yù)測的不連續(xù)十字形快速搜索算法[J].計(jì)算機(jī)應(yīng)用究,2008,25(10):
2929-2931.
[5] Zhou Wei, Duan Zhemin,Hu Hongqi.Fast motion estimation algorithm for H.264/AVC based on centered prediction[J].Journal of Systems Engineering and Electronics.2010,21(6):1103-1110.
[6] 李桂菊,劉剛,梁靜秋.H.264快速運(yùn)動估計(jì)算法的改進(jìn)[J].光學(xué)精密工程.2010,18(11):2489-2496.
[7] JVT Reference Software of H.264.http://iphome.hhi.de/suehring/tml/.