
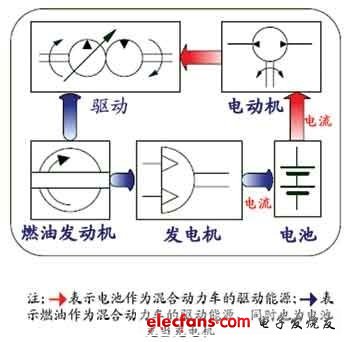
對(duì)于混合電動(dòng)汽車,在實(shí)際運(yùn)行中,為了實(shí)現(xiàn)電動(dòng)機(jī)與發(fā)動(dòng)機(jī)之間的快速切換,要求系統(tǒng)有較短的響應(yīng)時(shí)間;為了保證汽車運(yùn)行的穩(wěn)定性,要求系統(tǒng)具有精確的電流定位;同時(shí),為了保證系統(tǒng)控制的可靠與準(zhǔn)確,對(duì)系統(tǒng)采樣精度與控制速度的要求也較高。研究混合電動(dòng)汽車的能量流控制策略,關(guān)鍵在于研究電池與電動(dòng)機(jī)和發(fā)動(dòng)機(jī)之間的關(guān)系。
在實(shí)際工作中,混合電動(dòng)汽車工作環(huán)境復(fù)雜、各種干擾因素的影響較大,給研究其能量流狀態(tài)帶來(lái)了較大的困難。能否在實(shí)驗(yàn)室對(duì)動(dòng)力電池的工作性能進(jìn)行模擬與仿真呢?這樣,不僅可以節(jié)省大量的人力物力,而且對(duì)于混合電動(dòng)汽車的設(shè)計(jì)和總成有很好的參照作用。
本文將介紹的混合電動(dòng)汽車能量流仿真系統(tǒng)就是針對(duì)上述要求而設(shè)計(jì)的,該系統(tǒng)可仿真混合電動(dòng)汽車的實(shí)際工作環(huán)境,為研究混合電動(dòng)汽車控制策略提供了一個(gè)靈活、簡(jiǎn)便、高效的平臺(tái)。
系統(tǒng)特點(diǎn)
整個(gè)系統(tǒng)采用組合式平臺(tái)搭建,根據(jù)仿真工作的要求,按照工作電流的大小組合使用對(duì)應(yīng)的仿真模塊來(lái)構(gòu)成整個(gè)系統(tǒng)的能量控制部分。采用這種結(jié)構(gòu)設(shè)計(jì)可以大大減小整個(gè)系統(tǒng)的體積與功耗。
系統(tǒng)中集成了CAN2.0B和RS-232C接口,可以與汽車內(nèi)的各種控制儀表進(jìn)行通信與數(shù)據(jù)交換,與汽車總控系統(tǒng)的標(biāo)準(zhǔn)通信接口兼容,能夠方便的移植到實(shí)際的混合電動(dòng)汽車系統(tǒng)中。同時(shí),可以直接與計(jì)算機(jī)通信,由計(jì)算機(jī)來(lái)控制系統(tǒng)的運(yùn)行,便于實(shí)現(xiàn)監(jiān)控與仿真。
系統(tǒng)結(jié)構(gòu)
混合電動(dòng)汽車能量流仿真系統(tǒng)主要由充電系統(tǒng)、放電系統(tǒng)和控制系統(tǒng)三個(gè)部分組成。系統(tǒng)結(jié)構(gòu)框圖如圖1所示。
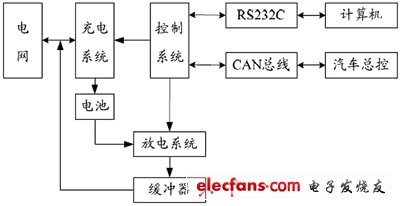
圖1 仿真系統(tǒng)結(jié)構(gòu)
在充電系統(tǒng)中,采用高效率的脈寬調(diào)制方式(PWM),同時(shí)采用反饋穩(wěn)定控制系統(tǒng),使得充電過(guò)程快速穩(wěn)定。
在放電系統(tǒng)中,采用節(jié)能型的能量回饋方式,將電能返回電網(wǎng)或者仍然回到充電系統(tǒng),達(dá)到節(jié)能降耗的目的。
在控制系統(tǒng)中,采用高速嵌入式微處理器,具有抗干擾能力強(qiáng)、響應(yīng)速度快、控制方式靈活的特點(diǎn)。
1 充電系統(tǒng)
首先將電網(wǎng)電壓進(jìn)行整流,經(jīng)過(guò)脈沖寬度調(diào)制,再經(jīng)過(guò)隔離變壓器變換,然后進(jìn)行整流穩(wěn)壓,即可得到所需的工作電壓。為了保證充電過(guò)程的快速穩(wěn)定,將電壓、電流采樣值引入穩(wěn)定控制系統(tǒng),使得充電過(guò)程快速穩(wěn)定。充電系統(tǒng)結(jié)構(gòu)如圖2所示。
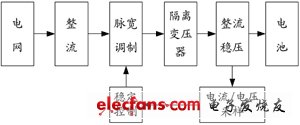
圖2 充電系統(tǒng)結(jié)構(gòu)
2 放電系統(tǒng)
電池的放電系統(tǒng)采用能量回饋方式。首先將動(dòng)力電池的電能進(jìn)行變換,送入中間緩沖器,然后通過(guò)逆變方式將電能變換為三相交流,這部分能量既可以用于返回電網(wǎng),又可以將它再次送入充電系統(tǒng),實(shí)現(xiàn)電能的重復(fù)利用,同時(shí)可有效減少電流波動(dòng)對(duì)電網(wǎng)的影響。放電系統(tǒng)結(jié)構(gòu)如圖3所示。
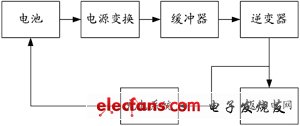
圖3 放電系統(tǒng)結(jié)構(gòu)
3 控制系統(tǒng)
本系統(tǒng)采用基于高速嵌入式微處理器的控制系統(tǒng)。高速處理器能夠保證快速完成動(dòng)力電池的充放電任務(wù),并且通過(guò)數(shù)字濾波算法使系統(tǒng)具有較好的抗干擾能力。高精度的A/D、D/A控制單元使得充放電過(guò)程動(dòng)態(tài)穩(wěn)定,滿足控制要求。轉(zhuǎn)換狀態(tài)用中斷方式通知CPU讀取轉(zhuǎn)換結(jié)果,保證系統(tǒng)的快速響應(yīng)。監(jiān)控計(jì)算機(jī)通過(guò)接口函數(shù)就可以控制系統(tǒng)的運(yùn)行,并且可以采集實(shí)時(shí)參數(shù)進(jìn)行數(shù)據(jù)的分析、處理與監(jiān)控。控制系統(tǒng)結(jié)構(gòu)如圖4所示。
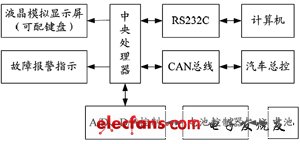
圖4 控制系統(tǒng)結(jié)構(gòu)
選用Microchip公司的PIC18F6720為主控制器,該MCU片內(nèi)集成多通道的10位精度的采樣轉(zhuǎn)換器,可以方便的采集電池的電壓、充電電流、放電電流和電池溫度等多種信號(hào);內(nèi)置兩個(gè)串行通信接口,可以與上位機(jī)進(jìn)行異步通信;SPI接口可以用來(lái)擴(kuò)展內(nèi)部總線;PWM輸出可以對(duì)回路電流進(jìn)行調(diào)節(jié)等。控制系統(tǒng)電路如圖5所示。
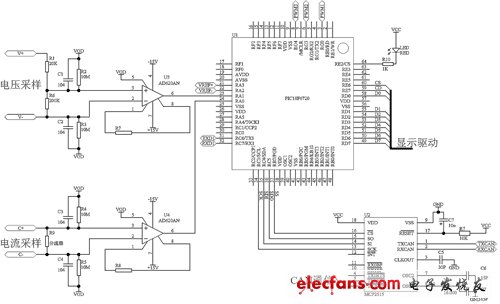
圖5 控制系統(tǒng)電路
4 人機(jī)交互
通過(guò)LCD顯示器可以直觀的顯示系統(tǒng)的工作狀態(tài)和電池工作情況,具有良好的人機(jī)交互界面。在控制系統(tǒng)中設(shè)置了短路與過(guò)熱保護(hù),故障報(bào)警指示,最大限度達(dá)到系統(tǒng)的安全可靠,保護(hù)系統(tǒng)與動(dòng)力電池的安全。圖6為L(zhǎng)CD顯示的示意圖。
(a)工作狀態(tài)
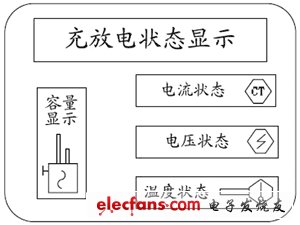
(b)測(cè)試狀態(tài)
圖6 LCD顯示示意圖
通信系統(tǒng)
系統(tǒng)內(nèi)建了兩種通信總線:CAN2.0B和RS-232C。
1 CAN總線通信
CAN總線是專為解決現(xiàn)代汽車中各種控制器、執(zhí)行機(jī)構(gòu)、監(jiān)測(cè)儀器和傳感器之間的數(shù)據(jù)通信而開發(fā)的總線式串行通信技術(shù)。但CAN只包括了物理層和數(shù)據(jù)鏈路層,在汽車工程師協(xié)會(huì)SAE推薦的標(biāo)準(zhǔn)SAE J1939進(jìn)一步規(guī)范了汽車內(nèi)部網(wǎng)絡(luò)的標(biāo)準(zhǔn)。
J1939采用CAN2.0B的擴(kuò)展幀格式。進(jìn)一步定義了CAN數(shù)據(jù)幀仲裁域中的標(biāo)識(shí)位。29位ID的格式如表1所示。
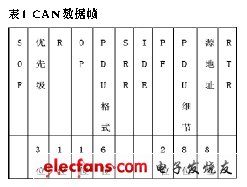
一個(gè)協(xié)議數(shù)據(jù)單元(PDU)包括7個(gè)預(yù)定的域。它們是優(yōu)先級(jí)、保留位、數(shù)據(jù)頁(yè)、PDU格式、PDU細(xì)節(jié)、源地址和數(shù)據(jù)域。CAN數(shù)據(jù)幀中的SOF、SRR、IDE和RTR部分控制域,CRC、ACK和EOF沒有包括在PDU。
數(shù)據(jù)域?yàn)?~8字節(jié)的數(shù)據(jù)。當(dāng)需要使用9~1785字節(jié)來(lái)表達(dá)某個(gè)參數(shù)組時(shí),數(shù)據(jù)通信將由多個(gè)CAN數(shù)據(jù)幀完成。
2 RS-232C通信
RS-232C用來(lái)與監(jiān)控計(jì)算機(jī)進(jìn)行數(shù)據(jù)與控制命令通信,根據(jù)監(jiān)控計(jì)算機(jī)的控制指令來(lái)執(zhí)行相應(yīng)的動(dòng)作,同時(shí)將系統(tǒng)的狀態(tài)參數(shù)傳遞到監(jiān)控計(jì)算機(jī)系統(tǒng)。
監(jiān)控計(jì)算機(jī)使用查詢方式與仿真系統(tǒng)通信。數(shù)據(jù)格式分為數(shù)據(jù)頭、數(shù)據(jù)體及校驗(yàn)碼三部分。數(shù)據(jù)頭用于判斷該條信息的類別,以便接收到數(shù)據(jù)信息后做出對(duì)應(yīng)的處理;數(shù)據(jù)體存放真正要傳輸?shù)臄?shù)據(jù)信息;校驗(yàn)碼采用奇偶檢驗(yàn)碼來(lái)對(duì)整條數(shù)據(jù)進(jìn)行校驗(yàn)。在系統(tǒng)中統(tǒng)一采用“@”作為傳輸數(shù)據(jù)的開始,“:”作為傳輸數(shù)據(jù)的結(jié)束,如表2所示。

對(duì)于命令信息只有信息頭和校驗(yàn)碼,對(duì)于數(shù)據(jù)信息則還包括了數(shù)據(jù)體部分。在上下位機(jī)通信期間,數(shù)據(jù)發(fā)送方會(huì)在相同的時(shí)間間隔內(nèi)重復(fù)發(fā)送相同的數(shù)據(jù),直到收到對(duì)方的應(yīng)答信息;若在一定時(shí)間間隔內(nèi)仍未收到應(yīng)答信息,則表示出現(xiàn)通信故障,數(shù)據(jù)發(fā)送失敗。接收方收到數(shù)據(jù)后,會(huì)根據(jù)數(shù)據(jù)頭、數(shù)據(jù)尾及校驗(yàn)碼判斷數(shù)據(jù)是否完整、正確。若是則回復(fù)表示成功接收的應(yīng)答信息,否則等待發(fā)送方繼續(xù)發(fā)送。
如果一條數(shù)據(jù)分成多次發(fā)送的時(shí)候,采用的是發(fā)送—應(yīng)答模式,即每當(dāng)收到應(yīng)答信息后才發(fā)送下一條數(shù)據(jù)。
系統(tǒng)性能指標(biāo)
混合電動(dòng)汽車能量流仿真系統(tǒng)為研究混合電動(dòng)汽車提供了一個(gè)硬件平臺(tái),適用于鉛酸、鎳氫、鋰離子等大功率動(dòng)力電池系統(tǒng)。系統(tǒng)實(shí)時(shí)顯示電池的充、放電狀態(tài),發(fā)動(dòng)機(jī)工作狀態(tài)、能量流動(dòng)狀態(tài)等重要參數(shù)。
系統(tǒng)的性能參數(shù)如表3所示。

結(jié)論
本系統(tǒng)最大限度地降低了混合電動(dòng)汽車的前期研發(fā)投入,較好的解決了通常軟件仿真中建模復(fù)雜、準(zhǔn)確性低、難以實(shí)用的問(wèn)題。根據(jù)仿真系統(tǒng)的工作狀態(tài),可以驗(yàn)證控制效果,來(lái)調(diào)整混合電動(dòng)汽車的控制策略與控制參數(shù),從而為混合動(dòng)力汽車的設(shè)計(jì)、性能預(yù)測(cè)和分析提供了一種有效的手段。