醫(yī)學(xué)超聲液性病變圖像多見數(shù)個(gè)無回聲區(qū),呈“蜂窩狀”,邊界不清晰,為了清晰地提取醫(yī)學(xué)超聲液性病變圖像的邊緣,進(jìn)一步為臨床診斷提供可靠依據(jù),在此將幾種不同的邊緣檢測(cè)算法應(yīng)用于醫(yī)學(xué)超聲液態(tài)病變圖像中,經(jīng)實(shí)驗(yàn)結(jié)果得出,經(jīng)典的邊緣檢測(cè)算法不能很好地提取圖像的邊緣,而基于Snake模型的邊緣檢測(cè)算法,人為設(shè)定邊緣控制點(diǎn),智能動(dòng)態(tài)調(diào)整曲線,獲得了很好的邊緣提取效果,具有很高的臨床應(yīng)用價(jià)值。
0 引言
鑒于醫(yī)學(xué)圖像可以看到人體組織的局部器官病變,所以醫(yī)學(xué)成像成為疾病檢查的重要手段,但由于設(shè)備、技術(shù)等原因,得到的醫(yī)學(xué)圖片邊緣往往模糊不清,因此醫(yī)學(xué)圖像邊緣檢測(cè)是醫(yī)學(xué)圖像處理和分析的一個(gè)非常重要的分支。目前醫(yī)學(xué)成像方法主要有:X光成像、核磁共振成像、超聲成像以及正電子發(fā)射斷層成像,其中,超聲成像從成像成本、成像時(shí)間以及對(duì)病人的傷害等方面都顯示出了它的優(yōu)勢(shì),本文就以醫(yī)學(xué)超聲圖像為例,對(duì)超聲診斷中常見的液性病變圖像進(jìn)行邊緣提取算法分析。
經(jīng)典的邊緣檢測(cè)算子利用邊緣處一階或二階導(dǎo)數(shù)來檢測(cè)梯度變化情況,基本的微分檢測(cè)算子有Roberts算子、Sobel算子、拉普拉斯算子和Canny算子等。近年來,隨著數(shù)學(xué)理論和人工智能的發(fā)展,又出現(xiàn)了許多新的邊緣檢測(cè)方法,比如基于分?jǐn)?shù)階微分法、小波變換法、Snake模型法、模糊檢測(cè)法、數(shù)學(xué)形態(tài)學(xué)法、神經(jīng)網(wǎng)絡(luò)法等。這些邊緣檢測(cè)方法最終目的都是檢測(cè)出圖像的邊緣信息,但在解決特定特征圖像時(shí)也顯現(xiàn)出各自的優(yōu)勢(shì)和不足之處。所以,如何采用合適的技術(shù)對(duì)醫(yī)學(xué)圖像進(jìn)行邊緣提取,為臨床醫(yī)生提供更準(zhǔn)確的病人數(shù)據(jù)是目前研究的一個(gè)熱點(diǎn)。
本文首先對(duì)幾種邊緣檢測(cè)方法進(jìn)行分析,然后將其應(yīng)用于超聲液性病變圖像的邊緣提取中,得出不同的提取效果,與采用改進(jìn)的Snake模型邊緣提取算法進(jìn)行比較,實(shí)驗(yàn)表明,基于Snake模型的邊緣提取算法邊緣提取效果較好。
1 邊緣檢測(cè)算法
邊緣檢測(cè)目的是要檢測(cè)出圖像中灰度變化的不連續(xù)區(qū)域,確定它們?cè)趫D像中的精確位置,為后期的圖像分析和處理提供信息,圖像的邊緣包含了物體形狀的重要信息,主要存在于目標(biāo)與目標(biāo)、目標(biāo)與背景、區(qū)域與區(qū)域(包括不同色彩)之間,是圖像分割、紋理特征和形狀特征等圖像分析的重要基礎(chǔ)。圖像邊緣檢測(cè)的實(shí)質(zhì)是采用某種算法來提取出圖像中對(duì)象與背景間的交界線。
1.1 基于一階微分的邊緣檢測(cè)算法
圖像中的邊緣通常與圖像強(qiáng)度或圖像強(qiáng)度的一階導(dǎo)數(shù)的不連續(xù)性有關(guān)。圖像強(qiáng)度的不連續(xù)可分為:
(1)階躍不連續(xù),即圖像強(qiáng)度在不連續(xù)處的兩邊的像素灰度值有著顯著的差異;
(2)線條不連續(xù),即圖像強(qiáng)度突然從一個(gè)值變化到另一個(gè)值,保持一個(gè)較小的行程后又返回到原來的值。
在一維情況下,階躍邊緣同圖像的一階導(dǎo)數(shù)局部峰值有關(guān)。梯度是函數(shù)變化的一種度量,而一幅圖像可以看作是圖像強(qiáng)度連續(xù)函數(shù)的取樣點(diǎn)陣列。因此,圖像灰度值的顯著變化可用梯度的離散逼近函數(shù)來檢測(cè)。
梯度是一階導(dǎo)數(shù)的二維等效式,定義為向量:

有2個(gè)重要的性質(zhì)與梯度有關(guān):
(1)向量G(x,y)的方向就是函數(shù)f(x,y)增大時(shí)的最大變化率方向;
(2)梯度的幅值由下式給出:
數(shù)字圖像中,求導(dǎo)數(shù)是利用差分近似微分來完成的。根據(jù)模板的大小以及權(quán)值的不同,人們提出了很多梯度算子,比如Roberts算子、Sobel算子、Prewitt算子都是基于一階微分的梯度經(jīng)典算子。
1.1.1 Roberts算子
根據(jù)計(jì)算梯度原理,采用對(duì)角線方向相鄰2像素之差得到的就是Reberts算子。Roberts算子是22模板的一階微分算子,是一種斜向偏差分的梯度計(jì)算方法,梯度的大小代表邊緣的強(qiáng)度,梯度的方向與邊緣走向垂直,因此,Roberts梯度算子檢測(cè)水平和垂直邊緣的效果好,定位精度高,但容易丟失部分邊緣。因?yàn)镽oberts沒進(jìn)行平滑處理,對(duì)噪聲較敏感,經(jīng)常會(huì)出現(xiàn)孤立點(diǎn)。用該算子處理邊緣陡峭度高且噪聲小的圖像效果較佳。
1.1.2 Sobel算子
Sobel算子是使用3 x 3模板的一階微分算子,采用帶權(quán)值的方法計(jì)算差分,是在Roberts算子的基礎(chǔ)上將方向差分運(yùn)算與局部平均結(jié)合起來的一種方法。Sobel算子以f(x,y)為中心的33的鄰域上計(jì)算x和y方向上的偏導(dǎo)數(shù)Gx,Gy。利用像素上、下、左、右相鄰點(diǎn)的灰度加權(quán)算法,根據(jù)在邊緣點(diǎn)處達(dá)到極值進(jìn)行邊緣檢測(cè)。Sobel算子很容易在空間上實(shí)現(xiàn),對(duì)噪聲具有較好的平滑作用,能提供比較準(zhǔn)確的邊緣方向信息,但定位精度不高,容易產(chǎn)生偽邊緣,其測(cè)得邊緣寬度一般至少為2個(gè)像素。但由于實(shí)際中很多情形下對(duì)定位精度的要求都不是很高,因此它是一種較為常用的邊緣檢測(cè)算子。
1.1.3 Prewitt算子
Prewitt和Sobel算子都是使用3×3模板的一階微分算子,它們是在研究曲面擬合的基礎(chǔ)上提出的。擬合是指已知某連續(xù)函數(shù)的一系列離散函數(shù)值,通過最小二乘法等準(zhǔn)則來確定該函數(shù)中的待定系數(shù)。Prewitt和Sobel算子的2個(gè)差分模板的系數(shù)之間的區(qū)別僅在于求平均的方法不同。隨后出現(xiàn)的Kirseh算子用不等權(quán)的8個(gè)3×3循環(huán)平均梯度算子分別與圖像進(jìn)行卷積,取其中的最大值輸出,它可以檢測(cè)各個(gè)方向上的邊緣,減少了由于平均而造成的細(xì)節(jié)丟失,但同時(shí)增加了計(jì)算量。
1.2 基于二階微分的邊緣檢測(cè)算法
前面討論了基于一階微分的邊緣檢測(cè),如果所求的一階微分高于某一閾值,則確定該點(diǎn)為邊緣點(diǎn)。一階微分組成的梯度是一種矢量,不但有大小還有方向,和標(biāo)量比較,數(shù)據(jù)存儲(chǔ)量比較大。一種更好的方法就是求梯度局部最大值對(duì)應(yīng)的點(diǎn),并認(rèn)定它們是邊緣點(diǎn),通過去除一階微分中的非局部最大值,可以檢測(cè)出更精確的邊緣。一階微分的局部最大值對(duì)應(yīng)著二階微分的零交叉點(diǎn),這意味著在邊緣點(diǎn)處有一階微分的峰值,同樣地,有二階微分的零交叉點(diǎn)。這樣,通過找圖像強(qiáng)度的二階微分的零交叉點(diǎn)就能找到邊緣點(diǎn)。
在二維空間,對(duì)應(yīng)二階微分有兩種算子:Laplace算子和Marr算子。Laplace算子也稱拉氏算子,它的特點(diǎn)是具有旋轉(zhuǎn)對(duì)稱性而不具備方向性,只需要一個(gè)3×3模板。Laplaee算子是對(duì)二維函數(shù)進(jìn)行運(yùn)算的二階導(dǎo)數(shù)算子,與方向無關(guān),對(duì)取向不敏感,因而計(jì)算量要小。根據(jù)邊緣的特性,Laplace算子可以作為邊緣提取算子,計(jì)算數(shù)字圖像的Laplaee值可以借助模板實(shí)現(xiàn),但是它對(duì)噪聲相當(dāng)敏感,它相當(dāng)于高通濾波,常會(huì)出現(xiàn)一些虛假邊緣。由于Laplace算子存在著諸多缺陷,它一般并不直接應(yīng)用于邊緣檢測(cè),而是結(jié)合其它方法以提高邊緣的定位精度。而Marr算子就是在Laplace算子基礎(chǔ)上改進(jìn),由于它使用的是高斯型的Laplace模板,因此又被稱作LOG算子,先對(duì)圖像用Gauss函數(shù)進(jìn)行平滑,然后利用Laplace算子對(duì)平滑的圖像求二階導(dǎo)數(shù)后得到的零交叉點(diǎn)作為待選邊緣。LOG算子就是對(duì)圖像進(jìn)行濾波和微分的過程,是利用旋轉(zhuǎn)對(duì)稱的LOG模板與圖像做卷積,確定濾波器輸出的零交叉位置。
1.3 Canny算子
Canny算子是最常用的邊緣檢測(cè)方法之一,是一個(gè)具有濾波、增強(qiáng)和檢測(cè)的多階段的優(yōu)化算子。
該算法的基本過程如圖1所示。

Canny算子檢測(cè)邊緣的實(shí)質(zhì)是求信號(hào)函數(shù)的極大值問題來判定圖像邊緣像素點(diǎn)。基本步驟為:
(1)用高斯濾波器平滑圖像;
(2)用一階偏導(dǎo)的有限差分來計(jì)算梯度的幅值和方向;
(3)對(duì)梯度幅值進(jìn)行非極大值抑制;
(4)用雙閾值算法檢測(cè)和連接邊緣。Canny算子能夠得到連續(xù)完整的圖像,但需要注意的問題是:Gauss濾波的尺度,以及雙閾值的選擇。
1.4 基于Snake模型的邊緣檢測(cè)算法
Snake模型是1987年由Kass提出的,它的基本思想是以構(gòu)成一定形狀的控制曲線為模板(或者稱為輪廓線),通過模板自身的彈性形變與圖像局部特征相匹配達(dá)到調(diào)和,即某種能量函數(shù)極小化,完成對(duì)圖像邊緣的提取,通過對(duì)模板的進(jìn)一步分析而實(shí)現(xiàn)圖像的理解和識(shí)別。能量最小化模型已經(jīng)有了很長(zhǎng)的發(fā)展歷史,Kass對(duì)其進(jìn)行了改進(jìn),采用動(dòng)態(tài)調(diào)整的方法來實(shí)現(xiàn)它,對(duì)圖像的高層信息進(jìn)行分析和提取而不至于受到太多低層信息的影響。通過在原始的最小化函數(shù)中加入外力因子,可以引導(dǎo)初始化的輪廓線朝著特定的方向前進(jìn),最后達(dá)到提取目標(biāo)邊界的目的。
1.4.1 基本Snake模型
Kass等提出的基本Snake模型由一組控制點(diǎn)組成,即v(s)=(x(s),y(s)),s∈[0,1],其中x(s)和y(s)分別表示每個(gè)控制點(diǎn)在圖像中的坐標(biāo)位置,s是以傅立葉變換形式描述邊界的自變量。其對(duì)應(yīng)的能量函數(shù)定義為:
式中:Eint為曲線的內(nèi)部能量;Eext為外部能量。
內(nèi)部能量定義為:
![]()
式中|vs(s)|為彈性能量,是曲線相對(duì)于弧長(zhǎng)的一階導(dǎo)數(shù)的模,受彈性系數(shù)的調(diào)節(jié),控制著曲線的張力。|vss(s)|是彎曲能量,是曲線相對(duì)于弧長(zhǎng)的二階導(dǎo)數(shù)的模,受剛性系數(shù)的調(diào)節(jié),控制曲線的變形程度。
對(duì)于普通的灰度圖像I(x,y),典型的外部能量(外部力)表達(dá)有如下2種定義:
![]()
式中▽為梯度算子,是方差為σ的二維高斯函數(shù)。在圖像邊緣區(qū)域,圖像灰度值的梯度往往較大,取反后計(jì)算以滿足能量最小的要求。
每一次迭代,曲線的變形是為了使如下的能量函數(shù)達(dá)到最小化:

彈性能量和彎曲能量合稱內(nèi)部力,內(nèi)部力用于控制輪廓線的彈性形變,選取適當(dāng)?shù)膮?shù)α(s)和β(s)將能量函數(shù)ESnake極小化,所對(duì)應(yīng)的v(s)就是對(duì)物體的分割。在能量函數(shù)極小化過程中,彈性能量迅速把輪廓線壓縮成一個(gè)光滑的圓,彎曲能量驅(qū)使輪廓線成為光滑曲線或直線,而外部力則使輪廓線向圖像的高梯度位置靠攏,基本Snake模型就是在這3個(gè)力的聯(lián)合作用下工作的。
1.4.2 改進(jìn)的Snake模型
基本Snake模型在應(yīng)用的時(shí)候存在一些缺陷:
(1)要求初始的輪廓線必須與目標(biāo)邊緣非常的接近,這是因?yàn)槟芰亢瘮?shù)往往會(huì)收斂到一個(gè)非期望的局部最小值,如果初始的輪廓線離目標(biāo)較遠(yuǎn),就會(huì)使曲線變形到一個(gè)無法預(yù)計(jì)的形狀;
(2)基本Snake模型對(duì)無法捕獲凹陷邊界。這樣就限制了Snake模型應(yīng)用到一些存在凹陷區(qū)域的圖像上。
近年來,針對(duì)以上缺陷,許多研究不僅對(duì)Snake模型本身的能量函數(shù)構(gòu)造和求解算法作了很大改進(jìn),更在其基礎(chǔ)上衍生出了許多新輪廓線模型,它們有些在形式上已經(jīng)與基本Snake相去甚遠(yuǎn),而且也要復(fù)雜得多,但其指導(dǎo)思想?yún)s是一脈相承的。比如,Cohen提出了一種氣球力理論,通過使用不同尺度的外力場(chǎng),增加外力場(chǎng)的捕捉范圍,來驅(qū)動(dòng)輪廓線向目標(biāo)邊緣逼近。XuChenyang提出的GVF Snake將梯度矢量場(chǎng)(GVF)代替?zhèn)鹘y(tǒng)外力場(chǎng),讓曲線隨著圖像凹陷的部分而發(fā)生變形,圈出凹陷的邊緣,由于GVF對(duì)輪廓線的初始位置不是非常的敏感,尤其對(duì)于二值圖像,所以它可以很快的收斂到目標(biāo)邊緣,很好地解決了這些問題。
GVF Snake將基本Snake的外部力用擴(kuò)散方程進(jìn)行處理,得到整個(gè)圖像域的梯度向量場(chǎng)作為外部力,經(jīng)過擴(kuò)散方程處理后的GVF更加有序,更能體現(xiàn)物體邊界的宏觀走勢(shì)。由于GVF不是一個(gè)表達(dá)式,無法用能量函數(shù)的形式求解,因此GVF Snake是利用力的平衡條件進(jìn)行優(yōu)化,GVF Snake具有更大的搜索范圍,對(duì)輪廓線初始位置不敏感,可以分割凹陷的邊界,對(duì)梯度絕對(duì)值的大小乃至噪聲具有更好的魯棒性,而且它還不必預(yù)先知道輪廓線是要膨脹還是收縮。
本文將改進(jìn)的GVF Snake模型應(yīng)用于醫(yī)學(xué)超聲液性病變圖像中,并與其他的邊緣檢測(cè)方法進(jìn)行比較分析。
2 實(shí)驗(yàn)結(jié)果分析
醫(yī)學(xué)超聲診斷出的液性病變多以囊腫為主,常見的囊腫有甲狀腺囊腫、卵巢囊腫、肝囊腫等,這些超聲液性病變圖像灰度變化梯度不大,多見數(shù)個(gè)無回聲區(qū),呈“蜂窩狀”,邊界不清晰。
本文選取兩幅具有代表性的肝囊腫、甲狀腺囊腫超聲液態(tài)病變圖像,用不同的邊緣檢測(cè)算法對(duì)其進(jìn)行處理,實(shí)驗(yàn)結(jié)果如圖2,圖3所示。
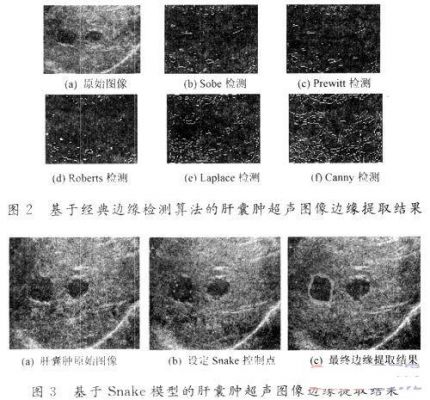
通過以上兩組實(shí)驗(yàn)可以看出,由于超聲液態(tài)病變圖像固有特征,經(jīng)典的邊緣檢測(cè)算法并不能清晰的勾畫出液性病灶的邊緣來,對(duì)包含病灶區(qū)域的擴(kuò)大區(qū)域?qū)嵤┻吘墮z測(cè)算法,將得到更多冗余的邊緣信息,不能得到感興趣病灶區(qū)域的輪廓。而Snake模型卻可以較好地選取特定的區(qū)域,利用算法特有的曲線變化方式,最終收攏到雙側(cè)灰度梯度變換平衡點(diǎn)位置,達(dá)到邊緣提取的良好效果,主要原因在于:
(1)Snake模型可以人為的設(shè)定待提取邊緣的主要控制點(diǎn),縮小了曲線變化的范圍,更加具有針對(duì)性的對(duì)特定區(qū)域進(jìn)行邊緣提取;
(2)Snake模型對(duì)圖像灰度變化較敏感,在曲線內(nèi)力和外力達(dá)到平衡的情況下,曲線可以很好的穩(wěn)定在一個(gè)位置,形成平滑的連續(xù)的曲線。

3 結(jié)語
本文應(yīng)用幾種不同的邊緣檢測(cè)算法提取醫(yī)學(xué)超聲液態(tài)病變圖像的邊緣,實(shí)驗(yàn)結(jié)果表明,經(jīng)典邊緣檢測(cè)算法的提取效果不明顯,而基于Snake模型的邊緣提取算法由于采用動(dòng)態(tài)的調(diào)整方法,提取的圖像邊緣完整、平滑、清晰,方便于后續(xù)的診斷性測(cè)量,具有一定的臨床應(yīng)用價(jià)值,因此,在臨床使用的醫(yī)學(xué)超聲儀器中,使用類似算法提取液性病變圖像邊緣,將是一個(gè)應(yīng)用趨勢(shì)。
