一、前沿
隨著IT產(chǎn)業(yè)和半導(dǎo)體行業(yè)的發(fā)展,集成電路市場呈現(xiàn)穩(wěn)定增長趨勢。一方面,固晶機(jī)等半導(dǎo)體設(shè)備在市場上需求越來越大,另一方面,LED產(chǎn)業(yè)的蓬勃發(fā)展對LED生產(chǎn)設(shè)備的要求也越來越高,與此同時(shí),IPC技術(shù)的快速發(fā)展為滿足以上需求提供了保證。
二、LED固晶機(jī)系統(tǒng)概述
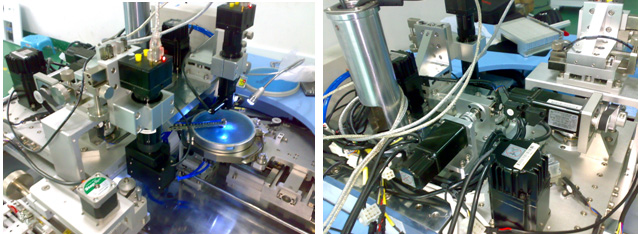
LED固晶機(jī)是一種將LED晶片從LED晶片盤吸取后貼裝到PCB上,實(shí)現(xiàn)LED晶片的自動健合和缺陷晶片檢測功能的自動化生產(chǎn)設(shè)備,可滿足大多數(shù)LED生產(chǎn)線的需求,適于各種高品質(zhì),高亮度LED的生產(chǎn),部分可適用于三極管、半導(dǎo)體分立器件、DIP和SOP等產(chǎn)品的生產(chǎn)。適用范圍廣,通用性強(qiáng)。
LED固晶機(jī)的工作原理:由上料機(jī)構(gòu)把PCB板傳送到工作臺卡具上的工作位置,先由點(diǎn)膠機(jī)構(gòu)將PCB需要鍵合晶片的位置點(diǎn)膠,然后鍵合臂從原點(diǎn)位置運(yùn)動到吸取晶片位置,晶片放置在薄膜支撐的擴(kuò)張器晶片盤上,鍵合臂到位后吸嘴向下運(yùn)動,頂針向上運(yùn)動頂起晶片,在拾取晶片后鍵合臂返回原點(diǎn)位置(漏晶檢測位置),鍵合臂再從原點(diǎn)位置運(yùn)動到鍵合位置,吸嘴向下鍵合晶片后鍵合臂再次返回原點(diǎn)位置,這樣就是一個(gè)完整的鍵合過程。當(dāng)一個(gè)節(jié)拍運(yùn)行完成后,由機(jī)器視覺檢測得到晶片下一個(gè)位置的數(shù)據(jù),并把數(shù)據(jù)傳送給晶片盤電機(jī),讓電機(jī)走完相應(yīng)距離后使下一個(gè)晶片移動到對準(zhǔn)拾取晶片位置。PCB板的點(diǎn)膠鍵合位置也是同樣的過程,直到PCB板上所有的點(diǎn)膠位置都鍵合好晶片,再由傳送機(jī)構(gòu)把PCB板從工作臺移走,并裝上新的PCB板開始新的工作循環(huán)。
LED固晶機(jī)系統(tǒng)結(jié)構(gòu)主要包括運(yùn)動控制模塊、氣動部分、機(jī)器視覺部分和由伺服電機(jī)構(gòu)成的運(yùn)動執(zhí)行機(jī)構(gòu)。

三、BWS伺服在固晶機(jī)的應(yīng)用
固晶機(jī)上總共采用4套200W伺服和2套100W伺服,分別控制X,Y軸傳動機(jī)構(gòu)以及鍵合臂取晶動作。其中要求最高的為控制鍵合臂的100W伺服。
伺服動作要求:
100W伺服電機(jī)通過同步帶帶動連桿快速正反轉(zhuǎn)實(shí)現(xiàn)裝有吸晶咀的鍵合臂做逆時(shí)針和順時(shí)針方向位移,逆時(shí)針到位后吸晶咀吸取晶元然后順時(shí)針固定晶圓。此動作要求:1.快速定位時(shí),馬達(dá)要平穩(wěn),不能抖動,否則吸晶和固晶的位置會不準(zhǔn)確;2.客戶要求每個(gè)動作周期盡量的快,由此對伺服的響應(yīng)有較高要求。
通過伺服增益參數(shù)的調(diào)整,最終可以實(shí)現(xiàn)鍵合臂伺服在3msec內(nèi)完成整定,整個(gè)固晶周期為245msec/顆,獲得客戶的認(rèn)可。
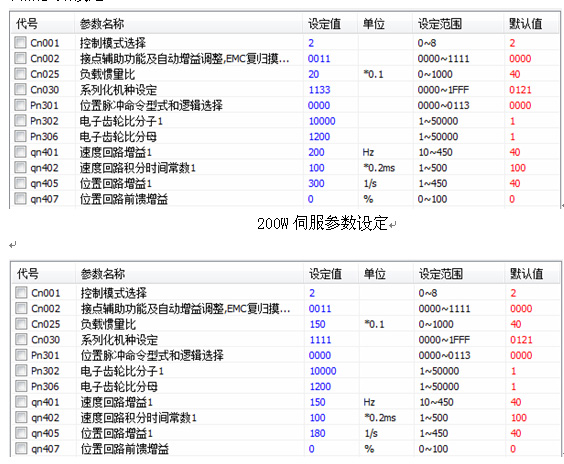
100W伺服參數(shù)設(shè)定
四、總結(jié)
固晶機(jī)作為一個(gè)新興行業(yè)應(yīng)用的代表,有著較高的技術(shù)門檻。BWS伺服在固晶機(jī)的成功應(yīng)用,則充分彰顯了BWS伺服的優(yōu)良性能。
