
1.1系統(tǒng)調試及試運行
管理系統(tǒng)的調試分為各種功能模板的調試,軟件功能調試及系統(tǒng)的整體調試,。系統(tǒng)運行正常后,,再對電流、電壓,、溫度等精度進行校準,。接著進行一段時間的臺架試驗。最后這套系統(tǒng)裝車,,進行整車性能試驗和試運行,。在調試和運行的過程中,主要遇到了以下幾個問題:
1.系統(tǒng)抗干擾能力較差,,當電池大電流放電或車上電機運轉時,,CAN總線通訊會丟失數據或錯誤。
2.單電池電壓測量電路中的場效應管和運算放大器由于靜電原因和插拔的影響,,會損壞,。
3.2003年7月的5000公里運行實驗中,由于連續(xù)幾天陰雨天氣,,導致環(huán)境濕度非常大,,系統(tǒng)的CAN通訊完全中斷。經深入檢查及測試后,,發(fā)現CAN接口電路多數損壞,,原因主要是電池組450伏高壓漏電所致。
針對以上問題,,我們主要采取了如下方法和措施,。
1.改進電路板,重新布線,。電路板上數字與模擬部分要分開布線,,最后實現一點接地。電源及CAN接口部分與其他電路要建立足夠的隔離區(qū),,以避免電路的相互漏電干擾,。在單電池測量電路上加上對場效應管和運放的保護器件。CAN接口芯片由82C250改為耐高壓的82C251.
2.濾波,。BMS-Ⅲ系統(tǒng)中,,系統(tǒng)供電入口端必須加一濾波器,,濾波器的電流不要太大,一般為負載的2~3倍,,這樣可防止外界騷擾對系統(tǒng)的沖擊,。實驗中還發(fā)現,充電機的輸出端必須加一個濾波器,,有效抑制高頻干擾,,否則,單電池電壓測量不準,。電池測量線的外面套一個磁環(huán),對抑制干擾也起一定作用,。
3.屏蔽,。在實驗中發(fā)現,如果不用屏蔽線,,當小電流充放電或者電機DC/DC沒有工作室時,,CAN總線還能正常工作,電流一旦加大或電機開始工作,,CAN總線就有可能失靈,。最后改用屏蔽線,并且整個CAN總線的屏蔽都接在一起,,CAN總線才完全工作正常,。電動汽車是一個強干擾源的地方,能用屏蔽線的地方盡量用屏蔽線以防患于未然,,這是非常值得注意的,。
4.改進供電系統(tǒng)。以前CAN總線由一點來供電,,這樣當空氣潮濕時,,電池組450伏高壓漏電很容易擊穿CAN接口電路。一方面將接口芯片改成耐高壓的器件,,另一方面我們將供電系統(tǒng)改成一頭一尾兩點供電,,大大提高了可靠性。
5.修改軟件,。在軟件中我們加強了對CAN總線錯誤狀態(tài)的監(jiān)測,,一旦總線出錯,程序將自動復位該CAN節(jié)點,。從軟件方面增強抗干擾能力,。
1.1運行結果
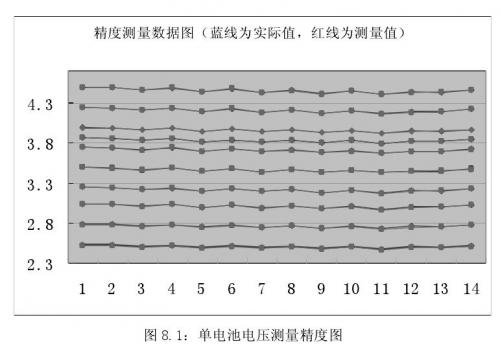
1.2.1精度實驗
在實驗室我們對系統(tǒng)的精度做了一次全面的試驗,結論是必須采取有效的抗干擾措施,,單電池電壓精度才能達到15毫伏,,圖8.1是14路單體電池電壓的精度試驗圖,。
1.2.2均衡實驗
我們研制的旁路分流均衡模塊在實驗室進行了42路均衡實驗??刂扑惴ㄊ侨^程電壓均衡控制,。按兩只單體電池為一單元進行均衡,均衡精度約為正負0.02伏,。圖8.2是均衡實驗圖,。

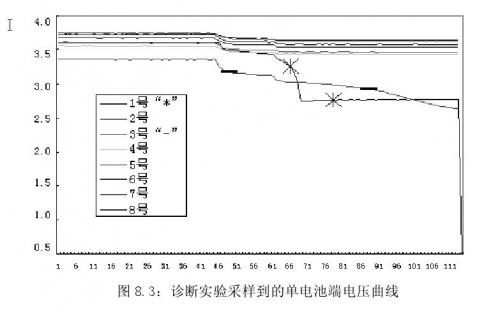
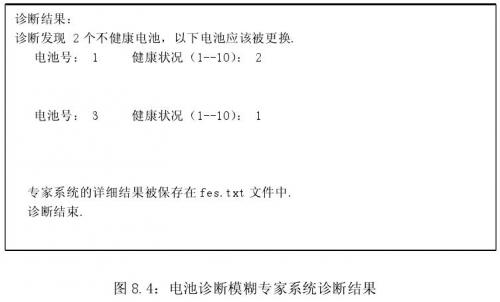
1.2.3診斷實驗
在實驗室我們用8節(jié)鋰電池進行了專家系統(tǒng)的診斷實驗。圖8.3是診斷實驗時在放電過程中采樣到的單電池端電壓變化曲線,,圖8.4是電池診斷模糊專家系統(tǒng)給出的診斷結果,。
1.2.4臺架實驗
系統(tǒng)樣機在電池實驗室斷續(xù)調試運行了近3-4個月,2002年9月末開始在整車組進行現場臺架試驗,。改進后的樣機裝在燃料電池平臺車上調試和試運行,。
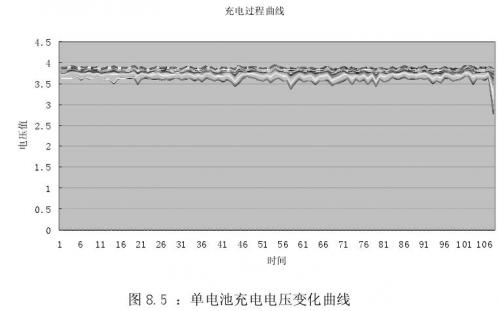
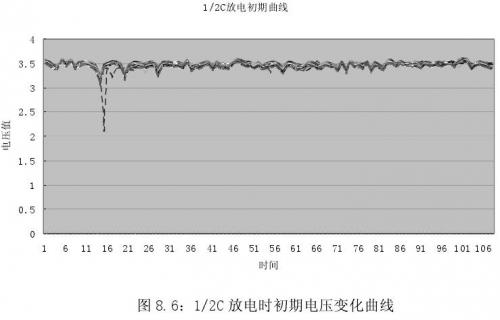
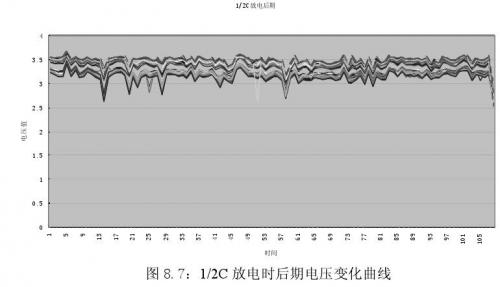
在臺架上進行了不同倍率的充電和放電試驗,記錄了充放電過程中的溫度,、電壓,、電流變化曲線。特別是收集了大量的單電池電壓的變化曲線,,分析了電池組的一致性,,對靜態(tài)SOC進行了標定和測試,考核了系統(tǒng)的可靠性,。圖8.5是臺架試驗過程中單電池充電時電壓變化曲線,,圖8.6是1/2C放電初期時的電壓變化曲線,圖8.7是1/2C放電后期的電壓變化曲線,。
1.2.5運行實驗這套系統(tǒng)裝在燃料電池大客車上,,完成了整車電路調試,進行了整車性能試驗和1600公里的運行,,圖8.8是車輛行駛過程中的放電電流及電量曲線,。
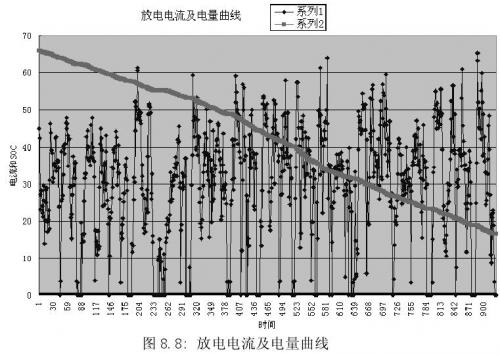
圖8.9和圖8.10是2003年10月25日車上實驗的數據曲線。初始走車時,,路面比較平穩(wěn),,坡少且坡度都不大,汽車運行平穩(wěn),。由下面兩圖可以看出,,當汽車處于平穩(wěn)運行狀態(tài)時,蓄電池處于小電流充電狀態(tài),,總電壓變化不大,,單體電池電壓也基本處于不變狀態(tài)。


這套管理系統(tǒng)經過了實驗室性能試驗,、近4個月的臺架試驗和整車調試及5000公里的實際運行,。在整個過程中,,系統(tǒng)運行基本正常。在單電池電壓測量,、總電壓,、總電流、溫度測量及SOC估計和其他功能方面均達到了整車的要求,。對均衡方案和模糊專家診斷也進行了研究,。結果表明,這套系統(tǒng)具有較高的可靠性和實用性,。取得的主要成果如下:
1.系統(tǒng)實現了分布式結構,、模塊化、多CAN通訊及多功能的先進系統(tǒng),。
2.測量實現了高精度,,總電流與總電壓精度分別為0.5%和0.2%,使電量計量更加精確,。
3.具有特色的鋰電池單體電壓測量電路,達到了108-126路,,可以擴展至更多路,,精度在(0.1-0.2)%.
4.對鋰電池的均衡電路和均衡算法進行了研究和設計,對鋰電池的模糊診斷專家系統(tǒng)進行了基本的實驗,。
5.新的SOC估計方法充分考慮各種因素包括一致性對電量估計的影響,,加入了各種補償,提高了電量估計的精度,。
6.實現了系統(tǒng)在車上的運行,,解決了系統(tǒng)24V電源自動控制、抗靜電干擾,、抗電機DC/DC干擾,,抗高壓漏電等一系列問題。通過了臺架實驗并完成了5000公里的整車實際運行試驗,,解決了出現的一系列技術問題,,工程化水平和可靠性有了很大的提高。
同時系統(tǒng)也不可避免地也存在一些不足,,對于系統(tǒng)下一步的改進,,有如下幾點建議:
1.考慮到將來診斷系統(tǒng)的擴展以及在混合車上對SOC的長期跟蹤,建議更換CPU.可考慮采用Philips的32位ARM系列嵌入式微控制器,,在兼顧性能與成本的基礎上,,建議采用32位微控制器LPC2129,LPC2129具有非常小的64腳封裝,、極低的功耗,、多個32位定時器,、4路10位ADC、2路CAN,、PWM通道,、46個GPIO以及多達9個外部中斷使它們特別適用于汽車、工業(yè)控制應用以及醫(yī)療系統(tǒng)和容錯維護總線,。這不僅可以降低成本,,還可以縮小測量電路板的體積,對于電池管理系統(tǒng)真正走向市場具有重要的意義,。
2.均衡電路還只是作了初步的研究,,采用了簡單的旁路分流法,控制算法是全過程電壓均衡,。究竟選用一種什么樣的均衡電路及控制算法才能讓能量的損耗最小,,充電均衡還是放電均衡都是很值得研究的問題。
3.模糊診斷專家系統(tǒng)離真正實用還有一定的距離,,故障診斷所用規(guī)則以及各隸屬度值的確定還需要與電池專家深入探討,,并且通過大量的實驗不斷調整。
目前系統(tǒng)的診斷以靜態(tài)或慢變化為主,,對于實際車上的動態(tài)診斷還需在數據獲取和SOR評估算法上作進一步的研究和改進,。