
引言
隨著無線通信的快速發(fā)展,由此引起的關于室內(nèi)定位的無線網(wǎng)絡和rfidchina.org/industry/tag.html" style="color: rgb(51, 51, 51); text-decoration: none; " target="_blank">RFID技術的結合也越來越受關注。人們對物品、人員位置的需求也越來越強烈。在室外的定位,如熟知的GPS定位已經(jīng)做到讓很多人都滿意的程度,但是一旦進入到室內(nèi),由于建筑物的阻擋以及多徑效應,GPS在室內(nèi)的定位的效果大打折扣,所以室內(nèi)定位的研究成為定位后續(xù)的研究重點。住公司中需要對人員和物品進行定位的時候范圍很大。傳統(tǒng)的標簽定位的距離有缺陷,限制了其廣泛的應用。所以義提出了RFID技術和無線網(wǎng)絡結合,擴大其定位的范圍。
無線Wi-Fi在一個免費的2.4GHz頻段,有很高的數(shù)據(jù)傳輸速度。所以選擇基于Wi-Fi網(wǎng)絡通信的定位標簽。Wi-Fi網(wǎng)絡有如下優(yōu)勢:Wi-Fi的工作頻段在2.4GHz,而且處于免費頻段,對用戶來說不需要額外的費用;Wi-Fi的傳輸距離可以達到100m,可以覆蓋整個大樓;Wi-Fi的傳輸速率很高,可達到54 Mbps.影響定位的精確度不僅僅是關于定位技術的選擇,同時定位算法的選擇也會影響其定位精度。常見的室內(nèi)定位的算法主要分為兩類:基于測距技術的定位算法和距離無關的算法。基于測距技術的算法一般是通過節(jié)點之間的距離或者角度來計算出未知節(jié)點的位置,實際運用中常見的有:基于接收信號強度指示算法(RSSI)、到達角度算法(AOA)、到達時間算法(TOA)等。距離無關的算法有:質心法、APIT算法、凸規(guī)劃算法等。這些算法都是利用節(jié)點之間的鄰近關系實現(xiàn)定位的。
一般來說,基于測距技術的算法比無需測距的精度要高。本文采用基于無線網(wǎng)絡的RFID技術,并在此基礎上提出一種算法,實現(xiàn)誤差范圍小的定位系統(tǒng)。
1系統(tǒng)的硬件結構
射頻識別(Radio Frequency Identification,RFID)俗稱電子標簽。RFID是一種非接觸式的自動識別技術,它通過射頻信號自動識別目標對象并獲取相關數(shù)據(jù),識別工作無需人工干預,可工作于各種惡劣環(huán)境。RFID技術可識別高速運動物體并可同時識別多個標簽,操作快捷方便。RFID是一種簡單的無線系統(tǒng),只有兩個基本器件,該系統(tǒng)用于控制、檢測和跟蹤物體。系統(tǒng)由一個詢問器(或閱讀器)和很多應答器(或標簽)組成。
定位系統(tǒng)的硬件包括:閱讀器、電子標簽和無線Wi-Fi模塊。
閱讀器是用于讀取/寫入標簽信息的設備。
電子標簽分為有源和無源兩類。有源技術電子標簽內(nèi)部有電池,它的壽命一般比無源的長。在電池更換前一直通過設定頻段向外發(fā)送信息。本文所采用的有源技術電子標簽具有長時間的壽命。
無線Wi-Fi模塊主要是用于電子標簽、閱讀器以及AP(用于接收標簽的發(fā)射信號)之間的通信。
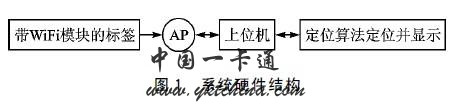
RFID定位可用于倉庫管理、公司人員、物品以及醫(yī)院病人的準確定位。但是由于距離限制了其發(fā)展,所以把無線Wi-Fi技術和RFID技術結合起來,進一步地提高定位的范圍和精度。系統(tǒng)硬件結構如圖1所示。
2系統(tǒng)軟件及定位算法
2.1基于信號強度算法
傳統(tǒng)的信號傳播容易受到折射、反射、繞射、衍射等影響,接收到的信號強度是各種途徑傳播來的信號的疊加。所以有時候信號強度增大,有時候又減小。經(jīng)過大量的實踐,發(fā)現(xiàn)接收信號強度服從log-normal分布。通過信號在傳播中的衰減來估計節(jié)點之間的距離,根據(jù)信道模型求解接收到待定位置的信號場強:

式中:n為路徑損耗指數(shù),與周圍的環(huán)境有關;XΣ是標準差為Σ的正態(tài)隨機變量;d0是參考距離,在室內(nèi)環(huán)境中通常取1 m;PL(d0)為參考位置的信號強度。
假設有n個AP,m個參考標簽,則AP點接收到的待定標簽的強度量P=(AP1,AP2,…,APn),采集到的第t個參考標簽的強度矢量為St=(St1,St2,…,Stn),則待定標簽和參考標簽St之間的歐氏距離為:

基于信號強度算法代表是LANDMARC算法。該算法主要通過比較不同Et來尋找與待定標簽位置最近的參考標簽。當由K個鄰近的參考標簽來確定一個待測標簽的時候,我們稱之為“K-最鄰近算法”,待定標簽坐標是(x,y):
其中的Wi和(xi,yi)分別是第i個鄰居參考標簽的權重因子和坐標位置。根據(jù)經(jīng)驗:
權重越大的,E值越小。LANDMARC箅法雖然能夠處理比較復雜的環(huán)境,但是在一些封閉的環(huán)境中可能會出現(xiàn)多徑效應,導致定位精度不高。又有研究者對LANDM ARC算法提出了改進:把不同的閱讀器中收獲到的標簽的RSSI值加入到一個集合,然后求出集合中頻率最高的標簽作為最近距離的標簽,然后再使用經(jīng)驗公式求出待測標簽的坐標位置。這樣可以獲得更準確的精度。
2.2三邊定位算法
三邊定位法:分別以已知位置的3個AP為圓心,以各個到待測標簽的距離最近參考標簽的距離為半徑作圓。所得的3個圓的交點為D.三角形算法示意圖如圖2所示。
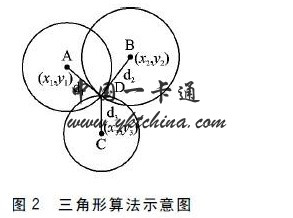
設位置節(jié)點D(x,y),已知A、B、C三點的坐標為(x1,y1),(x2,y2),(x3,y3)。它們到D的距離分別是d1、d2、d3.則D的位置可以通過下列方程中的任意兩個進行求解。
但是在實際應用中,由于測量誤差的存在,三個圓交于一點的情況很難存在。而這是經(jīng)常的事情,這會導致方程無解,無法定位出待測目標的位置。
2.3本文采用的算法
本方案中,我們采用的定位算法是基于接收信號強度的算法(即LANDMARC算法),并在LANDMARC算法的后面利用三邊定位算法,使其更準確。
實驗前在某公司大樓的走道和三間房內(nèi)各安置每隔3 m固定一個電子標簽(參考標簽),在該層樓的東南兩北角各放置一個AP.做好上位機與下位機的無線通信(軟件程序的服務器和客戶端的連接)。
實驗進行時,當待測標簽進入到AP(4個)的范圍內(nèi),開始接收到待測標簽發(fā)出的信號場強,并傳入上位機。同時也接收各個參考標簽在各個AP的信號場強,并傳入上位機。
定位算法則把待測標簽在4個AP(AP1,AP2,AP3,AP4)上的場強建立成一個場強矢量,同時參考標簽也建立成場強矢量。通過LANDMARC算法即通過比較待測標簽場強矢量與參考標簽場強矢量的歐氏距離,找出3個歐氏距離最小的參考標簽,并得知3個參考標簽的具體位置(在實驗前期,參考標簽放置時已經(jīng)有記錄)。對于3個參考點,不用再根據(jù)信號的強度來決定其半徑,而是3個以參考點為圓心,以最近參考標簽之間的距離(以確定每隔幾米放置一個參考標簽)的3/4長度為半徑做3個圓,這樣3個圓兩兩相交的可能性會增加。
由于3個圓很難在同一個點相交,所以對于3個圓之間的關系有3種:◆3個圓兩兩相交,并且3個圓有公共區(qū)域;◆3個網(wǎng)兩兩相交,但沒有公共區(qū)域;◆3個圓不相交。
具體關系如下:①當3個圓有公共區(qū)域時,則公共區(qū)域必然有3個交點,以3個交點作三角形,則待測標簽的坐標即是三角形內(nèi)心坐標。
②當兩兩相交無公共區(qū)域時,必然有兩兩公共區(qū)域。取兩圓相交區(qū)域的兩個交點的連線的中點,然后以這3個中點做三角形,其內(nèi)心就是待測標簽內(nèi)心坐標。
③3個圓不相交時舍棄,接受下一組最近3個參考標簽,若3次還沒有找到相交情況,即用3個參考標簽做的位置做三角形,其內(nèi)心就是待測標簽的位置。
本算法的優(yōu)勢為在原來LANDMARC算法的定位精度上,再進行三角定位,進一步提高定位精度。同時,以參考標簽之間的距離來進行進一步的三角定位,可以減少額外的計算,并且可以減少由于參考標簽場強的變化帶來的重復測量。
結語
本文主要討論了基于信號強度算法和基于非測距的三邊算法,同時對LANDMARC算法進行了進一步的改進。由相關實驗結果得出:該算法可以達到定位精度在1.5 m左右的誤差,該方案適合廣泛運用。