
引言
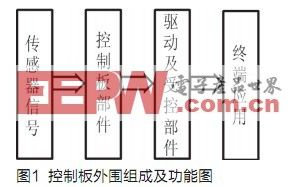
具有自動控制功能的電子設(shè)備已廣泛應(yīng)用于我國多型機上,,用于飛機上各機載設(shè)備的控制,、調(diào)節(jié)等功能。如圖1所示,,其控制系統(tǒng)主要由傳感器信號輸入,、核心控制板及經(jīng)過處理驅(qū)動后的控制信號輸出,最后輸出到機上的具體應(yīng)用,。本文將主要介紹如何利用通道復(fù)用技術(shù)設(shè)計實現(xiàn)具有雙余度DSP的控制板部件,,重點描述如何實現(xiàn)系統(tǒng)的雙余度DSP設(shè)計、雙DSP間如何通訊以及DSP的故障判定法則等,。
控制板硬件設(shè)計
控制板的硬件框圖如圖2所示,,主要由外部信息采集單元,、雙余度DSP模塊、應(yīng)用處理及其輸出單元等組成,。其中,,雙余度單元的CPU選用16位定點DSP TMS320LF2407A,,其運行最高速率可達40MHz、片內(nèi)集成多種外設(shè),。
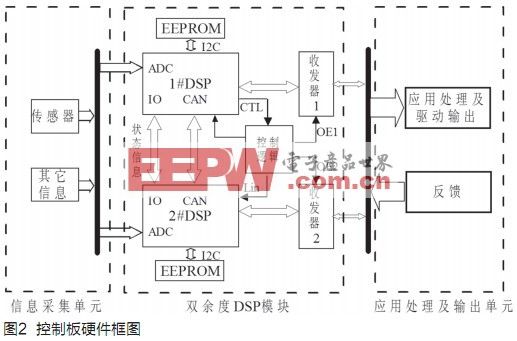
圖中,,兩個DSP通過CAN總線及I/O口進行控制信息交換及數(shù)據(jù)通信。兩個DSP分別與收發(fā)器1,、收發(fā)器2相連,,這兩個通道與外部數(shù)據(jù)或控制總線是相連的,即共享一個外部接口,,通道控制邏輯使同一時刻只能有一個通道打開,,保證系統(tǒng)工作的穩(wěn)定性。其中DSP1是控制邏輯的主控制機,,在正常工作的情況下由它控制著相應(yīng)通道的通斷及當前主控CPU,。每個DSP都有自己的EEPROM存儲器,用于存儲系統(tǒng)的各種即時信息,,并通過CAN總線在雙機間進行傳輸,。控制板工作時采集傳感器及外部控制信息,,通過CPU運算處理后由其對應(yīng)的通道輸出控制信息到相應(yīng)控制盒,,控制相應(yīng)設(shè)備的動作。
雙余度DSP模塊硬件設(shè)計
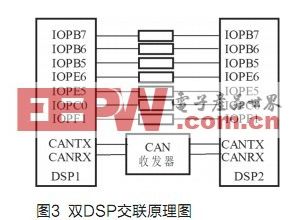
雙余度DSP模塊是本設(shè)計的重點,,其硬件原理如圖2的雙余度DSP模塊,。它由雙DSP核及通道控制邏輯兩部分組成。其中DSP1為主CPU,,DSP2為輔CPU,。當系統(tǒng)上電啟動后主CPU通過I/O口通知輔CPU進行自檢并采集其自檢信息,同時當主CPU的EEPROM內(nèi)容發(fā)生改變時,,主CPU通過CAN總線發(fā)送相應(yīng)的數(shù)據(jù)給輔CPU以更新輔CPU的EEPROM內(nèi)容,,如圖3所示。圖中CAN收發(fā)器為兩個對連的CAN總線收發(fā)器,,負責(zé)實現(xiàn)雙機間系統(tǒng)即時信息的傳送,,并存儲于各自對應(yīng)的EEPROM中,供維護和查詢,。
通道控制邏輯決定著整個系統(tǒng)的當前工作CPU,,即當其中一個CPU被認為有故障時,,通道控制邏輯將主動或是被動地切換到系統(tǒng)認為沒有故障的CPU,或決定由其中的一個CPU強制工作,。通道控制邏輯的硬件原理如圖4所示,。所謂的主動切換是指當主DSP通個自檢發(fā)現(xiàn)自身有故障(包括其對應(yīng)的通道故障),而其程序能正常工作的情況下,,由其程序產(chǎn)生的通過控制I/O口的邏輯電平而產(chǎn)生的通道切換,。被動切換是指非DSP自檢的因素產(chǎn)生,而是由于通道控制邏輯本身硬件故障引起的通道意外切換,。通道控制邏輯硬件由門電路組成,,能有效地防止雙機的搶權(quán)問題。同時控制邏輯返回給兩個DSP一個“CTL_BACK”狀態(tài)回讀信號,,用于判斷當前的通道情況,。

主DSP通過控制輸入端口的邏輯狀態(tài)來使能相應(yīng)的通道,只有當兩個控制端同時有效時選通主通道,,此時主DSP工作,。其他任何狀態(tài)都將打開輔通道??梢杂行П苊庥捎谥骺谼SP I/O口失效而產(chǎn)生不能切換的后果,。同時主DSP不斷檢測“CTL_BACK”狀態(tài)回讀信號的狀態(tài),否則將產(chǎn)生被動切換,,說明通道控制邏輯硬件故障,。輔DSP上電后不斷檢測“CTL_BACK”狀態(tài)回讀信號,若檢測到為有效,,則說明通道已經(jīng)切換到了輔通道,,輔DSP開始工作。
應(yīng)用處理及其輸出單元
針對于不同的應(yīng)用其處理及輸出單元具有各自的特殊性,,本應(yīng)用要求輸出多路電壓控制信號,,主要由帶SPI接口的16路模數(shù)轉(zhuǎn)換芯片及驅(qū)動電路組成,并通過DSP的I/O口控制D/A的復(fù)位,、清零等操作,。
系統(tǒng)軟件
系統(tǒng)軟件設(shè)計主要基于CCS2.2 Code Composer Studio集成開發(fā)環(huán)境,主程序采用匯編語言編寫,,軟件調(diào)試及仿真完成,??刂瓢錎SP軟件流程框圖如圖5所示,,系統(tǒng)軟件主要實現(xiàn)雙機間的通訊及故障判別并切換,并完成控制任務(wù)處理,。包括主DSP軟件及輔DSP軟件兩部分,,其中任務(wù)控制處理功能部分是相同的,,重點在于雙機間的交互問題。

在雙機交互的切換問題中,,起主要作用的是通道的切換,,當前打開的通道具有最高優(yōu)先權(quán),不管產(chǎn)生DSP切換的原因是什么,,其最終的結(jié)果都將是當前只有一個通道是打開的,,通道的切換可能是由主DSP程序主動控制而切換,或是控制邏輯本身的硬件原因,,但是只有這個對應(yīng)的打開通道的DSP能真正控制外部的輸出,,這即所謂的通道分用。切換依據(jù)如圖5所示,。
系統(tǒng)應(yīng)用控制軟件主要實現(xiàn)系統(tǒng)的具體的應(yīng)用功能,,主要由以下功能子程序組成:系統(tǒng)自檢子程序、雙機交互及故障判斷切換子程序,、控制應(yīng)用功能子程序等,。其中主DSP、輔DSP雙機交互軟件流程如圖6a,、圖6b所示,。

結(jié)語
雙余度DSP系統(tǒng)在對控制器要求較高的場合具有很好的實用意義,其基于通道復(fù)用的硬件設(shè)計結(jié)構(gòu)簡單且易于實現(xiàn),,有效地解決了雙機共同工作的權(quán)限問題,。本設(shè)計中所提出的雙余度DSP設(shè)計可以很方便地移植到其他的雙余度系統(tǒng)中。