
一、 背景介紹
AUTOSAR是英文AUTomotive Open Systems ARchitecture的縮寫,中文意思是汽車,它定義了一套支持分布式的、功能驅動的汽車電子軟件開發(fā)方法和電子控制單元上的軟件架構標準化方案,以便應用于不同的汽車平臺,提高軟件復用,降低開發(fā)成本。AUTOSAR是由汽車和其一線供應商建立的汽車軟件開發(fā)全球合作聯(lián)盟,于 2003年夏天正式成立,并于2004年啟動了主要的工作,其目的就在于控制汽車軟件的復雜性和多樣性。AUTOSAR包括9個核心成員:BMW Groups(寶馬)、BOSCH(博世)、Continental(大陸)、DAIMLER(戴姆勒)、Ford(福特)、GM(通用)、PSA Peugeot Citron(標志-雪鐵龍)、TOYOTA(豐田)、VOLKSWAGEN AG(大眾)。目前其成員已超過150個,國內OEM中已有一汽及上汽加入,恒潤科技成為繼一汽、上汽之后,國內第三家加入該組織的公司。
AUTOSAR自面世以來,從半導體工業(yè)、工具和軟件廠商、零部件供應商到汽車制造商本身,整個汽車領域內的價值體系都給予該標準積極的推動。 AUTOSAR開發(fā)成員在2007年發(fā)布了2.1版本,使AUTOSAR的發(fā)展到達了一個穩(wěn)定的階段,隨后通過幾個不同的開發(fā)項目對AUTOSAR的實用性進行了測試,現(xiàn)在AUTOSAR已經(jīng)做好進入到產品ECU的準備,而寶馬集團已將符合AUTOSAR標準的ECU(電子控制單元)應用在全新BMW 7系量產車型中,預計在2010年AUTOSAR的所有核心成員都將推出相關的產品。在商業(yè)領域里,支持AUTOSAR標準的工具和軟件供應商已推出了相應的工具和軟件,提供需求管理,系統(tǒng)描述,軟件構件算法模型驗證,軟件構件算法建模,軟件構件代碼生成,RTE生成,ECU配置以及基礎軟件和操作系統(tǒng)等服務,幫助OEM實現(xiàn)無縫的AUTOSAR系統(tǒng)軟件架構開發(fā)流程。目前AUTOSAR版本為3.1版,預計將于2009年秋季發(fā)布4.0版本。
由于AUTOSAR提倡“在標準上合作,在實現(xiàn)上競爭”的原則,其核心思想在于“統(tǒng)一標準、分散實現(xiàn)、集中配置”,所以采用AUTOSAR將為OEM帶來很大的好處,這將使得他們對于軟件采購和控制擁有更靈活和更大的權利,因為軟件系統(tǒng)的標準化和開放化將使更多的軟件供應商進入汽車電子行業(yè),從而使得他們有更多的選擇,同時軟件的質量監(jiān)督也會相應提高,有利于提高他們的產品質量。但是,也必須看到在全行業(yè)內推行此標準還是存在潛在障礙的,就是來自一些 OEM廠商和大的第一級汽車供應商的抵制,因為他們已經(jīng)有自己的標準和架構了,而采用AUTOSAR標準及其架構可能產生更換成本、喪失控制等風險。盡管如此,汽車電子軟件開發(fā)方法和軟件架構的標準化是汽車行業(yè)不可阻擋的發(fā)展趨勢,而且目前還沒有哪種標準比AUTOSAR標準走的更遠。鑒于此,國內汽車 OEM必須做好應對AUTOSAR的準備,這對他們來說,是挑戰(zhàn)更是機遇。
在AUTOSAR標準的實施過程中,OEM將起主導作用。OEM應如何提出需求并在他們的產品上使用這些來自不同供應商的具有標準功能和接口的軟件呢?AUTOSAR為此同時制定了方法上、流程上的標準,即AUTOSAR方法論。本文將著重解讀AUTOSAR方法論內容,講解OEM應如何將該標準應用在他們的產品研發(fā)及生產過程中。
二、 AUTOSAR 技術概述
AUTOSAR的計劃目標主要有3項,第一是建立獨立于硬件的分層的軟件架構;第二是為實施應用提供方法論,包括制定無縫的軟件架構堆疊流程并將應用軟件整合至ECU中;第三是制定各種車輛應用接口規(guī)范,作為應用軟件整合標準,以便軟件構件在不同的汽車平臺上的復用。
1、AUTOSAR軟件架構
為了實現(xiàn)AUTOSAR的目標,即實現(xiàn)應用程序和基礎模塊之間的分離,汽車電子軟件架構被抽象成幾個層,如圖1所示。
圖1:AUTOSAR軟件架構層次圖。
為了區(qū)別軟件依賴和硬件依賴,基礎軟件分為四個層次:服務層(Services Layer)、ECU抽象層(ECU Abstraction Layer)、微控制器抽象層(Microcontroller Abstraction Layer)和RTE(Runtime Environment)。除此四層外,在AUTOSAR軟件架構中還有復雜驅動(Complex Driver),由于對復雜傳感器和執(zhí)行器進行操作的模塊涉及到嚴格的時序問題,在AUTOSAR中這部分沒有被標準化。
* 服務層提供包括診斷協(xié)議、存儲管理、ECU模式管理和操作系統(tǒng)等在內的系統(tǒng)服務。除了操作系統(tǒng)外,服務層的軟件模塊都是與平臺無關的。
* ECU抽象層將ECU結構(如外設與ECU的聯(lián)接方式等)進行了抽象處理。該層與ECU平臺相關,但與微控制器無關。
#p#副標題#e#
* 微控制器抽象層包括微控制器相關的驅動(如I/O驅動、ADC驅動等)。
* RTE層負責軟件構件(即應用層)相互間的通信以及軟件構件與基礎軟件之間的通信。RTE層之下的基礎軟件對于應用層來說是不可見的,必須通過RTE進入,它將軟件構件從對底層軟件和硬件平臺的依賴中獨立出來,實現(xiàn)了應用程序和基礎軟件之間的分隔。2、 AUTOSAR方法論
AUTOSAR為符合該標準的汽車電子軟件系統(tǒng)開發(fā)過程定義了一套通用的技術方法,這種方法即被稱為AUTOSAR方法論(AUTOSAR Methodology)。汽車作為整車系統(tǒng)功能的規(guī)劃和設計者,需要了解并掌握AUTOSAR提供的這套開發(fā)流程,才能主導和推進符合 AUTOSAR標準的系統(tǒng)的開發(fā)過程。
兼容AUTOSAR標準的汽車電子軟件系統(tǒng)設計與開發(fā)流程如圖 2所示。
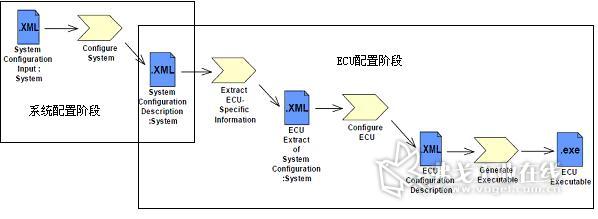
圖2:AUTOSAR系統(tǒng)設計與開發(fā)流程。
主要步驟可劃分兩個階段:
第一個階段是系統(tǒng)配置階段,這屬于系統(tǒng)級設計決策工作。首先是編寫系統(tǒng)配置輸入文件,為XML類型的文件。應用軟件的描述術語在 AOTUSAR中為軟件構件(Software Components),該文件將確定需要使用的軟件構件(即系統(tǒng)具有哪些功能)和硬件資源(ECU),以及整個系統(tǒng)的約束條件。AUTOSAR提供了一系列的模板(軟件構件模板,ECU資源模板和系統(tǒng)模板)和標準的信息交換格式,工具供應商可據(jù)此提供相應的工具支持,從而簡化系統(tǒng)設計的工作,最終系統(tǒng)設計者只需要使用工具填充或編輯相應的模板即可導出系統(tǒng)配置輸入文件。
系統(tǒng)配置輸入包含三部分內容,第一個輸入是軟件構件描述,定義每個需要的軟件構件的接口內容,包括數(shù)據(jù)類型,端口,接口等;第二個輸入是ECU資源描述,定義了每個ECU的資源需求,如處理器、外部設備、存儲器、傳感器和執(zhí)行器等;第三個輸入是系統(tǒng)約束描述,定義總線信號,拓撲結構和軟件構件的映射關系。
系統(tǒng)配置階段接下來的工作是將初步獲得的系統(tǒng)配置輸入文件借助系統(tǒng)配置生成器生成系統(tǒng)配置描述文件,同樣為XML文件,這是系統(tǒng)配置階段的最終工作成果。該文件將包含所有的系統(tǒng)信息,包括將軟件構件映射到相關的ECU上(這種映射需要考慮到構件的需要、構件的連接、資源需求以及約束條件,有時也需要考慮成本等方面的因素),以及通信矩陣(整車的網(wǎng)絡結構、時序以及網(wǎng)絡數(shù)據(jù)幀的內容)。
第二個階段是ECU的配置,這階段的工作需要對系統(tǒng)中每個ECU分別進行。首先是使用第一個階段的工作成果——系統(tǒng)配置描述文件,從中提取出與各個ECU相關的系統(tǒng)配置描述信息,提取的信息包括ECU通信矩陣、拓撲結構、頂級功能組合(據(jù)此產生需映射到該ECU上的所有軟件構件),將放在另一個XML文件中。提取信息的工作可借助工具完成。然后進入ECU配置的實際工作中,這一步負責往輸入對象中添加具體應用所必需的信息,如任務調度、必要的BSW模塊、BSW配置信息、給任務分配的可運行實體等。這一步的結果被放在ECU 配置描述文件中,它包含了具體ECU所需的所有信息。最后一步是生成具體ECU的可執(zhí)行程序,此步將根據(jù)ECU 配置描述文件中的配置信息構建完成ECU的基礎軟件的設置和與基于AUTOSAR構件的應用軟件的集成,最終生成ECU的可執(zhí)行代碼。
此外,要說明的是,AUTOSAR系統(tǒng)的設計過程使用了虛擬功能總線(Virtual Functional Bus)的概念。虛擬功能總線(Virtual Functional Bus)將AUTOSAR軟件構件相互間的通信以及軟件構件與基礎軟件之間的通信進行了抽象,同時使用預先定義的標準接口。而對于虛擬功能總線來說,ECU內部通信和外部總線通信并沒有什么區(qū)別,這種區(qū)別要等到系統(tǒng)布局以及ECU的具體功能最終確定才會體現(xiàn)出來。軟件構件本身對于這種區(qū)別并不關注,因此我們可以在獨立的情況下開發(fā)軟件構件。在系統(tǒng)實現(xiàn)過程中,虛擬功能總線所代表的功能最終以RTE的生成來體現(xiàn)。
3、標準化的應用接口
通過RTE實現(xiàn)AUTOSAR軟件構件(即應用程序)相互間的通信以及軟件構件與基礎軟件之間的通信的前提是,軟件構件必須具有標準的 AUTOSAR接口。目前,AUTOSAR 3.1版已定義了一些典型的汽車電子應用領域(動力,車身/舒適和底盤)的標準接口。AUTOSAR按照功能邏輯分別將這些領域的系統(tǒng)劃分成若干個模塊,這些模塊可被視為一個軟件構件或多個軟件構件的組合,這些功能性的軟件構件的接口被明確定義,所定義的接口的內容包括名稱,含義,范圍,數(shù)據(jù)類型,通信類型,單位等。應用軟件開發(fā)者在軟件構件的設計與開發(fā)時需要應用這些接口定義。
#p#副標題#e#
這里以車身/舒適系統(tǒng)的雨刷管理的軟件構件的接口定義為示例,如圖3:
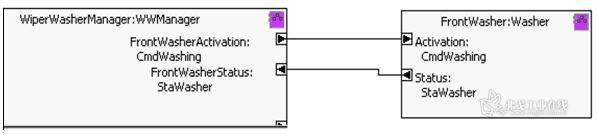
圖3:軟件構件的接口定義。
說明:
雨刷管理構件(WiperWasherManager)有兩個接口,CmdWashing 和StaWasher,圖中WWManager表示為雨刷管理軟件構件的實例。針對CmdWashing接口定義了以下信息:
1) CmdWashing接口由WiperWasherManager構件提供,其數(shù)據(jù)內容為FrontWasher構件的Activation接口所使用。
2)CmdWashing包含一個“Command”的數(shù)據(jù)元素。
3)“Command”的數(shù)據(jù)類型為“t_onoff”。
4)“t_onoff”屬于“RecordType”,該類型描述一般的開/關信息。
應用軟件開發(fā)者應該意識到,面向運行時環(huán)境(RTE)接口的應用軟件設計的重要性,及早地將AUTOSAR應用層接口引入到實際的項目中來,為實現(xiàn)應用軟件的可復用性做好準備,從而優(yōu)化整個軟件開發(fā)流程。
三、 設計應用與實施
仍以車身/舒適領域的外部車燈控制系統(tǒng)的設計為例,在本例中只涉及轉向燈的閃爍控制功能的實現(xiàn)。
在系統(tǒng)配置階段,第一步是收集系統(tǒng)配置輸入內容。首先收集實現(xiàn)該功能所需的軟件構件,如圖4右部邊框所示,在本系統(tǒng)中共使用了5個軟件構件,按照AUTOSAR提供的軟件構件模板編寫每個軟件構件的描述文件;然后明確系統(tǒng)中所用到的ECU資源,形成ECU資源描述文件,如圖4左上部邊框所示,這里有3類ECU;最后是系統(tǒng)約束條件的描述文件,描述系統(tǒng)的網(wǎng)絡拓撲關系。一般需要提供軟件構件描述和系統(tǒng)約束描述文件,以供零部件供應商在ECU系統(tǒng)開發(fā)時使用。
圖4:系統(tǒng)配置輸入內容。
以上描述文件的生成均有專門的工具(這類工具統(tǒng)稱為AUTOSAR描述文件編輯器)支持,用戶只需向工具中填充規(guī)定的內容即可。
軟件構件描述文件的生成,需要獲取每個軟件構件的關于接口,行為,直接的硬件接口(I/O),運行性能需求(內存,功耗,定時等)等方面的信息;而軟件構件描述文件本身將包含4部分內容:
* 一般特性:名稱,生產商等
* 通信屬性:端口,接口
* 內部結構:子構件,連接關系
* 需要的硬件資源:處理時間,調度,內存大小和類型等。
ECU資源描述文件生成之前,需要獲取每個ECU的關于傳感器和執(zhí)行器,硬件接口,硬件屬性(內存,處理器,功耗),連接和帶寬等方面的信息;而ECU描述文件本身將包含7部分內容:
* 一般特性:名稱,生產商等
* 溫度(自身,環(huán)境,冷卻/加熱)
* 可用的信號處理方法
* 可用的編程能力
* 可用的硬件:微控制器,架構(如多處理器);內存,接口(CAN,LIN,MOST,F(xiàn)lexRay),外設(傳感器/執(zhí)行器),連接(如引腳數(shù)目)。
* RTE之下針對微控制器的基礎軟件模塊
* 從引腳到ECU抽象層的信號
系統(tǒng)約束描述文件生成之前,需要關于整個系統(tǒng)的信息,如總線系統(tǒng),協(xié)議,通信矩陣和屬性,功能集群,功能部署(向ECU的分布);而系統(tǒng)約束描述文件本身將包含3部分內容:
* 網(wǎng)絡拓撲:總線(CAN,LIN,F(xiàn)lexRay),連接的ECU,網(wǎng)關,電源供應
* 通信(針對每個通道):通信矩陣,網(wǎng)關表
* 軟件構件的映射
以上所描述的系統(tǒng)配置輸入內容收集完整后,使用系統(tǒng)配置工具導出系統(tǒng)配置文件,這一步?jīng)Q定哪個軟件構件運行在哪塊ECU上,它生成ECU配置描述;此外還生成該系統(tǒng)內的通信矩陣。如圖5所示。
圖5:系統(tǒng)配置結果。
以上工作完成后,接下來進入ECU配置階段。將每個ECU的配置信息從系統(tǒng)配置文件中提取出來,其內容包括ECU通信矩陣、拓撲結構、頂級功能組合(即需映射到該ECU上的所有軟件構件的組合)。此外,還需要更具體的關于AUTOSAR的基礎軟件各主要部分的配置,如RTE的配置,OS 的配置,MCAL(微控制器抽象層)的配置和通信協(xié)議棧配置等。這些軟件部件的配置目前均有相應的工具支持,直接生成可編譯的頭文件以供ECU系統(tǒng)軟件的集成使用。在生成ECU可執(zhí)行程序之前,需獲得相關軟件構件和基礎軟件的代碼,然后與上述基礎軟件的配置頭文件進行連編,最后生成ECU的可執(zhí)行程序。如圖6所示。
圖6:ECU的配置與可執(zhí)行程序的生成。
#p#副標題#e#
綜上所述,整個系統(tǒng)設計和開發(fā)流程可用圖7表示,這里要注意的是,該過程可能需要多次迭代修改,以達到最優(yōu)。
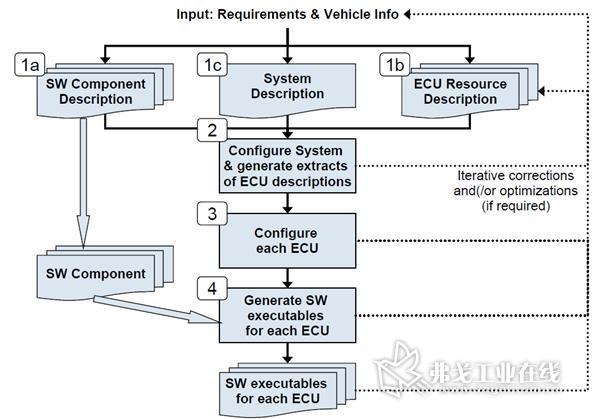
圖7:系統(tǒng)設計和開發(fā)流程。
四、總結
正在成為現(xiàn)實,建立這樣一個標準化平臺并貫徹標準化,將會縮短新產品的研發(fā)時間和測試時間,從而幫助企業(yè)實現(xiàn)快速的市場反應。許多都計劃在接下來的車型中采用AUTOSAR。在市場上不少工具和軟件供應商都已推出了符合AUTOSAR標準的工具或軟件支撐,可為 AUTOSAR系統(tǒng)的設計和開發(fā)提供完整的無縫的解決方案。
AUTOSAR是汽車電子軟件平臺標準化的歷程中的一個巨大飛躍,我們需要學習和理解它。但是也必須看到,在整個汽車行內打破傳統(tǒng)的軟件開發(fā)平臺需要相當長的一個過程。我們可以根據(jù)用戶的需求和目標,在初期搭建AUTOSAR與傳統(tǒng)軟件的混合平臺,這是是一個能夠實現(xiàn)向AUTOSAR平滑升級的可行的方法。在這個過程里,重點不是單純地使用,理解AUTOSAR的理念和思想才最重要,因為它對汽車電子軟件開發(fā)的工作流程和商業(yè)模式都將帶來意義深遠的變革。
參考文獻
1、 AUTOSAR SPECIFICATIONS Release3.1:AUTOSAR官網(wǎng)發(fā)布的規(guī)范文件
2、 《03_AUTOSAR_Tutorial.pdf》:AUTOSAR官網(wǎng)文件