
本文引用地址:http://www.eepw.com.cn/article/202302/443607.htm
1 概述
設(shè)計開發(fā)變電站智能巡檢機器人系統(tǒng)[1],變電站工作人員可通過遠程監(jiān)控室,不僅對現(xiàn)場機器人巡檢車體(以下簡稱車體)的運動進行控制,而且對車體的視頻和紅外設(shè)備進行控制。首先車體能夠沿著導航設(shè)定的路線進行巡檢,并根據(jù)導航系統(tǒng)對待檢設(shè)備進行智能精準定位;其次通過紅外熱成像儀和可見光攝像機等成像系統(tǒng)對變電站設(shè)備的運行狀態(tài)進行分析檢測[2],并將檢測數(shù)據(jù)傳送至監(jiān)控中心(包括遠程監(jiān)控室和本地監(jiān)控室);最后將檢測設(shè)備進行故障報警,并采取相應(yīng)措施。
2 方案設(shè)計
2.1 整體框架設(shè)計
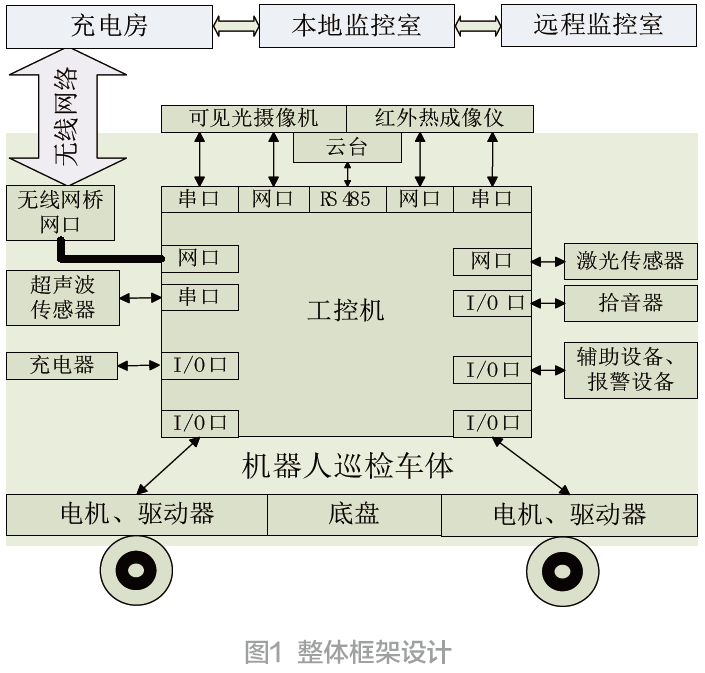
智能巡檢機器人系統(tǒng),既要安全可靠地完成巡檢任務(wù),在一定程度上減輕工作人員的巡檢工作量,又要不破壞變電站任何裝置、不影響電氣設(shè)備的正常運行。整個系統(tǒng)由五大部分組成:變電站遠程監(jiān)控室、本地監(jiān)控室、充電房、無線網(wǎng)絡(luò)和機器人巡檢車體;具體如圖1所示。其中變電站監(jiān)控室主要功能是對巡檢現(xiàn)場的情況進行監(jiān)控;本地監(jiān)控室不僅能夠通過上傳的視頻和紅外圖像對設(shè)備進行監(jiān)控,并能通過電子地圖來展現(xiàn)車體巡檢的工作過程;同時,本地監(jiān)控室把所有監(jiān)測數(shù)據(jù)上傳遠程監(jiān)控室,使遠程監(jiān)控室時時掌握變電站的運行狀況。
2.2 整體功能設(shè)計
智能巡檢機器人系統(tǒng)主要設(shè)計有七大功能:運動功能;語音功能;自主充電功能;巡檢方式設(shè)置和切換功能;自檢功能;智能故障報警功能;一鍵返航和鏈路中斷返航功能。
其中運動功能設(shè)計主要包括:車體前后方向和左右方向的重復(fù)自主導航;水平和垂直兩個旋轉(zhuǎn)自由度;障礙物檢測防碰撞;防跌落;車體云臺視角范圍始終不受車體任何部位遮擋影響;越障;涉水;爬坡;轉(zhuǎn)彎等。
語音功能設(shè)計主要包括:雙向智能語音(喊話和對講)傳輸功能。
自主充電功能設(shè)計主要包括:電池供電一次充電續(xù)航能力不小于5 h,電池電量不足時車體自動返回充電室完成自主充電。
巡檢方式設(shè)置和切換功能設(shè)計主要包括:巡檢系統(tǒng)包括人工輔助遙控巡檢及全自動巡檢兩種巡檢方式[3]。自檢功能設(shè)計主要包括:電機和驅(qū)動模塊,傳感器模塊、成像系統(tǒng)模塊、無線網(wǎng)橋模塊,工控機模塊等,以上任何模塊故障,均以明顯的光和聲在車體和監(jiān)控室后臺進行報警信息提示。
智能報警功能設(shè)計主要包括兩種:一種變電站設(shè)備的運行狀態(tài)異常故障報警信息提示。另外一種車體故障報警信息提示。
3 機器人巡檢車體設(shè)計
3.1 機器人巡檢車體整體框架設(shè)計
車體設(shè)計符合人機工程,采用全驅(qū)、全向平臺作為基礎(chǔ)傳動平臺;系統(tǒng)組成包括:工控機、步進電機及驅(qū)動器、直流電機及驅(qū)動器、云臺、可見光單目和雙目攝像機、紅外熱成像儀、無線網(wǎng)橋、激光傳感器、超聲波傳感器、拾音器、充電器、輔助設(shè)備、報警設(shè)備等,具體如圖1 所示。
3.2 機器人巡檢車體運動控制系統(tǒng)方案設(shè)計
運動控制系統(tǒng)是機器人巡檢車體最關(guān)鍵的核心技術(shù)。
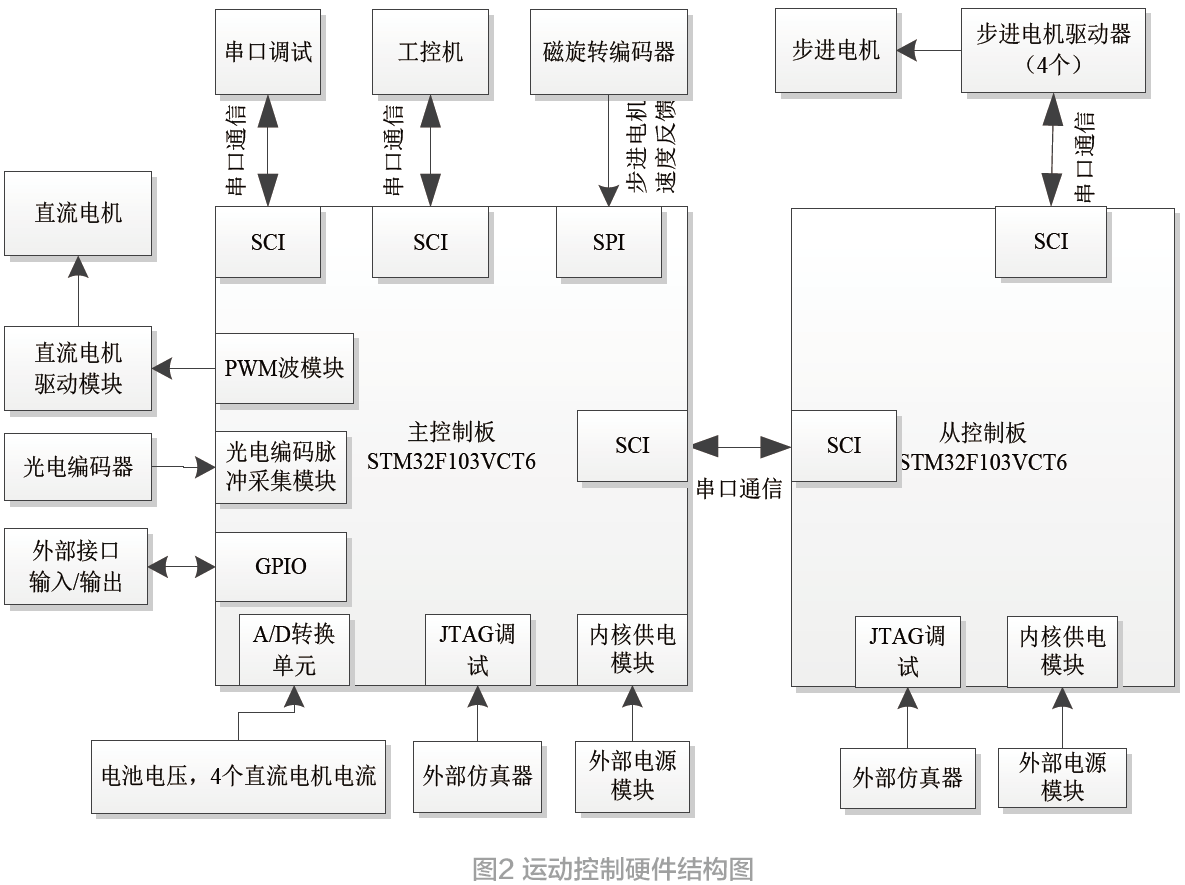
運動控制系統(tǒng)的主體部分由STM32 控制板組成,控制板由兩塊嵌入STM32F103VCT6 芯片的主板和從板組成,主板和從板采用SCI 協(xié)議進行通信。軟件算法在主板上實現(xiàn),采用PWM波和光電編碼器控制直流電機;從板主要實現(xiàn)對四個轉(zhuǎn)向步進電機的控制,主板得到轉(zhuǎn)向步進電機位置誤差參數(shù)(通過磁旋轉(zhuǎn)編碼器得到步進電機速度反饋信號)后通過串口發(fā)送到從板,從板再將這些參數(shù)放到通信協(xié)議里一起發(fā)給步進電機驅(qū)動器。具體見圖2 運動控制硬件結(jié)構(gòu)圖。
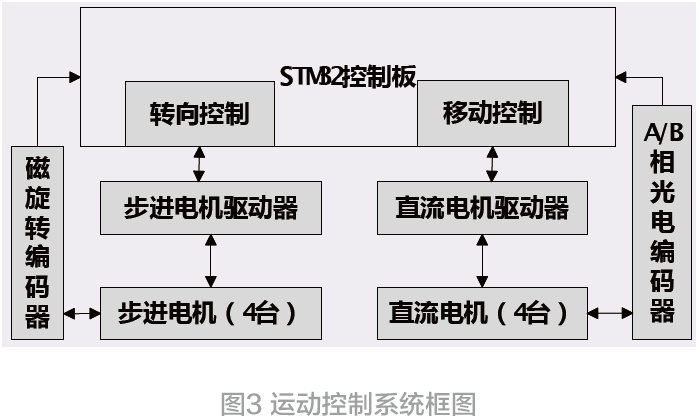
STM32 主控制板與工控機通信,接收X、Y、Z(ω )3 個速度值,通過底盤矢量分解得到每個轉(zhuǎn)向步進電機的速度和每個移動直流電機的速度(當前占空比),轉(zhuǎn)向步進電機速度送到轉(zhuǎn)向模塊,與磁旋轉(zhuǎn)編碼器傳回的數(shù)據(jù)做比較,實現(xiàn)位置的調(diào)整。移動直流電機的速度與A/B 相光電編碼器(通過定時器和計數(shù)器獲得)計數(shù)值做比較,并通過PID 調(diào)節(jié)PWM 波占空比,實現(xiàn)4 個車輪的直流電機控制。各個模塊相互之間的關(guān)系如圖3所示。
1)直流電機及驅(qū)動器設(shè)計
本項目直流電機設(shè)計考慮成本、負載力矩以及電機工作特點等因素,最終采用直流有刷MAXON 電機,其中減速比采用113,A/B 相光電編碼器分辨率采用512。直流電機的PWM 控制采用定頻調(diào)寬法。本項目直流電機驅(qū)動器負責把控制脈沖轉(zhuǎn)換成各電機轉(zhuǎn)動角度,實現(xiàn)車體移動。電機驅(qū)動器采用H 橋斬波驅(qū)動電路設(shè)計,其工作原理如下:車體前后左右四輪的驅(qū)動,以STM32 芯片作為控制器,利用STM32 芯片產(chǎn)生四組帶可編程死區(qū)時間的PWM 信號分別驅(qū)動控制[4]。
2)直流電機反饋檢測模塊設(shè)計
該模塊主要采集反饋信號,包括電機轉(zhuǎn)速、轉(zhuǎn)向,蓄電池電壓,電機電流等,主要由A/B 相光電編碼器、ADC 采樣電路完成。本項目采用MAXON 公司配套電機的增量式A/B 相光電編碼器。
3)步進電機設(shè)計
本項目采用AM24HS2402-08N 步進電機,步距角1.8° 。磁旋轉(zhuǎn)編碼器采用AMS 公司的AS5048A。
3.3 機器人巡檢車體控制系統(tǒng)軟件設(shè)計
本項目軟件設(shè)計充分考慮到機器人巡檢車體運動的協(xié)調(diào)性,包括動力學協(xié)調(diào)和運動學協(xié)調(diào);動力學協(xié)調(diào)指車體本體與各車輪的加速度的協(xié)調(diào);運動學協(xié)調(diào)指車體本體與各車輪的速度、偏轉(zhuǎn)角的協(xié)調(diào)[5]。車體控制策略包括:前后運動;左右運動;旋轉(zhuǎn)運動;轉(zhuǎn)彎運動;停止等。具體見圖4 運動控制程序流程圖。
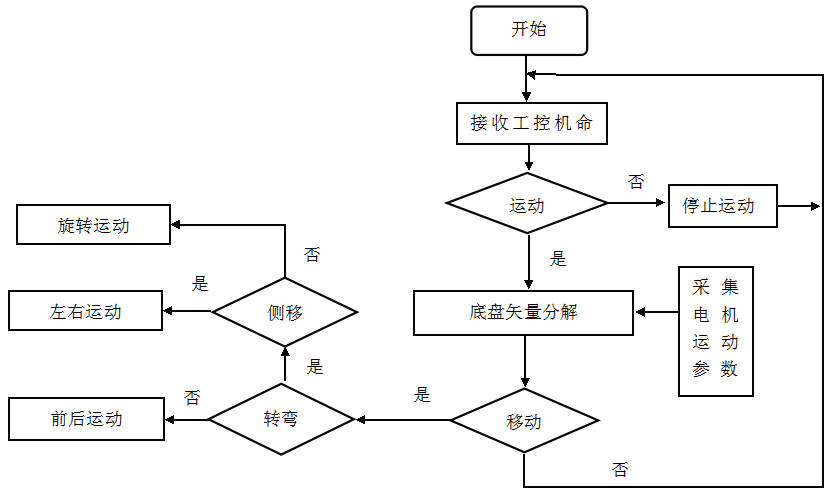
圖4 運動控制程序流程圖
4 結(jié)束語
本文詳細論述了一款智能巡檢機器人系統(tǒng)的研究和設(shè)計。對系統(tǒng)整體設(shè)計、機器人巡檢車體設(shè)計做了完整闡述。隨著變電站的智能巡檢機器人系統(tǒng)的安全可靠設(shè)計和功能不斷完善,以實現(xiàn)變電站巡檢任務(wù)的標準化、統(tǒng)一化、智能化。
參考文獻:
[1]李煥明.智能機器人巡檢系統(tǒng)在變電站的應(yīng)用研究[D].廣州:廣東工業(yè)大學,2020.
[2]郎福成,牟童,韓月.變電站智能巡檢機器人系統(tǒng)設(shè)計[J].電工材料,2017(6):36-38.
[ 3 ] 崔彥彬, 劉歡. 變電站智能巡檢機器人系統(tǒng)的設(shè)計[J].設(shè)計與研究,2014(4):53.
[4]趙璠璠.變電站智能巡檢機器人系統(tǒng)設(shè)計[J].自動化技術(shù)與設(shè)計,2020(10):233-235.
[5]胡桐.四輪獨立驅(qū)動和轉(zhuǎn)向移動機器人的設(shè)計與控制[D].合肥:合肥工業(yè)大學,2015.
(本文來源于《電子產(chǎn)品世界》雜志2023年2月期)
更多信息可以來這里獲取==>>電子技術(shù)應(yīng)用-AET<<
