
在無刷直流電機伺服控制系統(tǒng)中,無位置傳感器的位置檢測是關(guān)鍵,。無位置傳感器具有體積小,、精度高、可靠性好,、易于維護(hù)等優(yōu)點,,在伺服系統(tǒng)中得到廣泛的應(yīng)用。常用的轉(zhuǎn)子位置檢測法有反電動勢法,、磁鏈估計法、卡爾曼濾波等技術(shù),,比較成熟和常用的是反電動勢檢測技術(shù),。他是通過測量三相端電壓,檢測反電勢過零點得到轉(zhuǎn)子相位信號進(jìn)行換相,。但是在低速的情況下,,由于噪聲的干擾,反電動勢的幅值相對于噪聲信號小,,不易檢測出反電動勢,,從而引起電機失步。自適應(yīng)噪聲抵消法是以噪聲干擾信號為處理對象,,利用噪聲信號和原始被測信號不相關(guān)的特點,,自適應(yīng)地調(diào)整濾波器的傳遞特性,,將噪聲干擾抑制或者非常大的衰減,提高信號傳輸中的信噪比,。而自適應(yīng)LMS濾波算法計算簡單,,易于實時信號處理,運用廣泛,。因此本文提出基于自適應(yīng)噪聲抵消技術(shù)的反電動勢檢測法,,以中心點作為干擾信號,端電壓作為帶干擾信號的信號源,,利用信號源和噪聲干擾不相關(guān)的特性,,提煉出反電動勢而獲得過零點進(jìn)行位置檢測。
1設(shè)計原理
1.1 自適應(yīng)噪聲基本原理
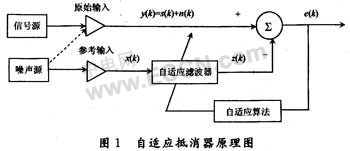
信號源被傳送到信號傳感器,,會附加不相關(guān)的噪聲n(k),,合并的信號為y(k)=s(k)+n(k)進(jìn)入抵消器。噪聲傳感器的輸出x(k)經(jīng)參數(shù)可調(diào)的數(shù)字濾波器后送入抵消器產(chǎn)生的輸出信號x(k),,根據(jù)兩噪聲信號相關(guān)和信號噪聲獨立的特性,,利用自適應(yīng)算法調(diào)節(jié)數(shù)字濾波器的參數(shù),使得輸出信號z(k)逼近信號源迭加的噪聲n(k),,這樣抵消器的輸出信號e(k)逼近被測信號s(k),。如圖1所示。
1.2 自適應(yīng)濾波算法
自適應(yīng)濾波采用的最優(yōu)準(zhǔn)則有最小均方誤差準(zhǔn)則,、最小二乘準(zhǔn)則,、最大信噪比準(zhǔn)則、最大似然準(zhǔn)則,、統(tǒng)計檢測準(zhǔn)則以及一些改進(jìn)的最優(yōu)準(zhǔn)則,。這里可以采用最小均方差誤差準(zhǔn)則。
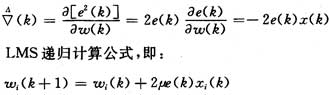
LMS算法是用瞬時功率梯度代替均方誤差梯度矢量的方法,,即:
迭代算法步驟如下:
(1)初始化,,選定初始權(quán)值ω(k)。
(2)計算k時刻濾波器的輸出為z(k)=ωT(k)x(k),。
(3)抵消器誤差輸出e(n)e(k)=y(k)-z(k),。
(4)下一時刻權(quán)向量更新為w(k+1)=ω(k)+2μe(k)x(k)。
(5)k=k+1,,跳轉(zhuǎn)到步驟(2),,重復(fù)迭代,直到算法收斂,。
算法穩(wěn)定性取決于兩個因素,,自適應(yīng)步長參數(shù)μ和自相關(guān)矩陣R。算法收斂件是0<μ<1/λmax,,λmax是相關(guān)矩陣R的最大特征值,,權(quán)值向量趨近最佳維納解,。μ的取值和濾波器的階數(shù)成反比,根據(jù)濾波器的階數(shù)取不同的步長,,可以保證較好的處理結(jié)果,。另一個指標(biāo)參數(shù)Ψ衡量穩(wěn)態(tài)失調(diào)量,定義為平均超調(diào)均方誤差和最小均方誤差之比,。失調(diào)近似表示為![]() ,,Ψ和μ成正比。當(dāng)濾波器階數(shù)一定時,,μ的大小控制著算法的收斂速度和達(dá)到穩(wěn)態(tài)的失調(diào)量的大小,。收斂速度和失調(diào)量是一對矛盾,選用較大的μ,,有較快的收斂速度,,但是由于大的盧值相應(yīng)的信噪比小,會導(dǎo)致較大的失調(diào)量,;過渡過程出現(xiàn)振蕩,,不能收斂。μ取值過小信噪比大,,但收斂速度會很慢,,所以取值要折中。
,,Ψ和μ成正比。當(dāng)濾波器階數(shù)一定時,,μ的大小控制著算法的收斂速度和達(dá)到穩(wěn)態(tài)的失調(diào)量的大小,。收斂速度和失調(diào)量是一對矛盾,選用較大的μ,,有較快的收斂速度,,但是由于大的盧值相應(yīng)的信噪比小,會導(dǎo)致較大的失調(diào)量,;過渡過程出現(xiàn)振蕩,,不能收斂。μ取值過小信噪比大,,但收斂速度會很慢,,所以取值要折中。
1.3 無刷直流電機無位置檢測
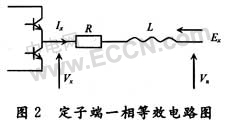
如圖2所示,,Vx為某一相對地端電壓,,三相繞組星型連接,Vn為中心點對地電壓,,EX是反電動勢,,R,L,,IX分別為相電阻,、相電感和相電流。繞組等效電路方程為:
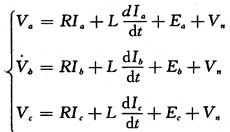
對于星型兩相導(dǎo)通,,三相電流之和等于0,,導(dǎo)通兩相反電動勢大小相等,方向相反,,在未導(dǎo)通相反電勢過零瞬間,將三個方程相加得到:
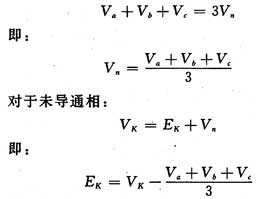
由上式可以很容易檢測到反電勢過零點,,移相30°即可得到換相點,。低速時反電勢淹沒在噪聲信號中不易檢測。運用噪聲抵消技術(shù),,將中心點Vn作為噪聲源,,端電壓Vk為信號源,,經(jīng)自適應(yīng)濾波器處理后,噪聲輸出在幅值和相位上逼近Vn,,和VK相減輸出反電勢,。
2 計算機仿真分析及性能分析
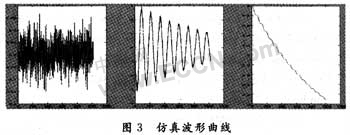
運用Matlab對自適應(yīng)濾波器進(jìn)行模擬仿真,可以很容易地觀察波形,,為此筆者編制相應(yīng)程序,,得到輸入信號源波形曲線、權(quán)矢量迭代曲線和輸出誤差波形曲線,。
這里信號源采用正弦波混合高斯白噪聲,,正弦波信號s=sin*(0.05*n),干擾噪聲randn(1,,2^10)呈(0,,1)正態(tài)分布,橫坐標(biāo)迭代1 024個數(shù)據(jù)點,,步長參數(shù)μ取0.001,,F(xiàn)IR階數(shù)取10,可以完全模擬無刷直流電的端電壓和中心點電壓信號,。
從仿真結(jié)果看出,,在第一幅仿真曲線表示的原始信號中,正弦信號完全掩蓋在噪聲信號中,,很難用通用的濾波方法提取出來,。采用LMS的自適應(yīng)FIR濾波方法后,在第二幅曲線圖中,,可以得到噪聲抵消后有用的正弦信號波形曲線,。輸出e(n)經(jīng)過一段時間振蕩幅值逐漸減小,接近期望正弦信號,。第三幅權(quán)矢量變化圖中,,隨著e(n)收斂,W逐漸趨向最佳濾波系數(shù)W0,。
3 自適應(yīng)濾波器的DSP" rel="http://www.eeworld.com.cn/my/keyad/ti.html" target="_blank">DSP實現(xiàn)
TMS230LF240X系列芯片是TI公司生產(chǎn)的24X系列定點DSP產(chǎn)品,,具有處理性能好,外設(shè)集成度高,、程序存儲量大,、A/D轉(zhuǎn)換速度快、I/O口資源豐富等優(yōu)點,,性能優(yōu)越,、功耗小、成本低,,可以對電機進(jìn)行高效實用的數(shù)字化控制,。這里利用DSP的部分模塊完成自適應(yīng)LMS噪聲抵消功能,。
3.1 整體框圖
該芯片ADC采樣通道數(shù)最多可以是16個轉(zhuǎn)換通道,因此可以采樣三相端電壓和中心點電壓四路模擬量,。從圖4看出,,參考輸入有兩個主通道,分別接電機非導(dǎo)通端電壓信號端和中心點信號端,,經(jīng)初步低通濾波后送人DSP的A/D模塊,,離散成數(shù)字輸入量進(jìn)行信號處理。轉(zhuǎn)換結(jié)束后,,經(jīng)低通濾波器平滑信號后將轉(zhuǎn)換后的信號存放在該通道相應(yīng)的寄存器中,。
要實現(xiàn)系數(shù)的迭代,可以采用循環(huán)尋址的方式,,用RPT指令可以實現(xiàn),。首先初始化B模塊、ARk寄存器,,累加器,。B1塊存放權(quán)系數(shù)ωi(n),采樣信號x(n-N+1)放在B0里,,塊長N為濾波器的階數(shù),。AR0指向ωi(n)地址,AR1指向x(n-N+1)地址,,AR2指向期望信號y(n),。用MPYA將兩部分?jǐn)?shù)據(jù)乘積結(jié)果加到累加器。用RPT重復(fù)執(zhí)行存放指令N-1次,,程序寄存器指針指向下一個采樣信號值,,更新累加器值。
4 結(jié)語
自適應(yīng)噪聲抵消系統(tǒng)是基于自適應(yīng)濾波原理的擴展,,在數(shù)字語音信號處理中可以有效地提取適用的語音信號,,有效降噪,提高信號處理質(zhì)量,。本文將這一思想運用到電機的噪聲處理中,,結(jié)合端電壓檢測法,將反電動勢提煉出來,。仿真結(jié)果表明自適應(yīng)噪聲抵消法能有效去噪,,使得電機在啟動和低速運轉(zhuǎn)時也能正常檢測,方案簡單可行,?;贚MS算法存在收斂特性和失調(diào)量受步長影響,最優(yōu)步長不太容易確定,因此可以采用NLMS,、RLS等改進(jìn)的LMS算法,效果更加理想,。