
1.引言
高壓輸電線及桿塔附件長期暴露在野外,因受到持續(xù)的機械張力、電氣閃絡、材料老化的影響而產(chǎn)生斷股、磨損、腐蝕等損傷,如不及時修復更換,原本微小的破損和缺陷就可能擴大,最終導致嚴重事故。因此,電力公司需要定期對線路設備進行巡檢,及時發(fā)現(xiàn)早期損傷和缺陷并加以評估,根據(jù)評估結果安排必要的維護和修復,從而確保供電的安全可靠性。傳統(tǒng)的人工巡檢方法不僅工作量大而且條件艱苦,特別是對于山區(qū)和大江大河等的輸電線路巡檢存在很大困難,甚至一些巡檢項目靠常規(guī)方法都難以完成。因此,采用機器人自動巡線成為保障高壓輸電線安全運行的一種必要手段。
高壓輸電線路巡線機器人屬于特種機器人的研究范疇,主要完成高壓供電線纜的無損探傷、懸垂絕緣子絕緣特性檢測、輸電線附件輸電性能測試、機械連接牢固性檢查、線纜異物清除等高空作業(yè)。國外在巡線機器人領域的研究起步較早,研究水平較高,1988年,日本東京電力公司的Sawada等人研制了光纖復合架空地線巡檢移動機器人,該機器人可以沿地線爬行,遇到障礙物時,可以通過弧形手臂輔助跨越。加拿大魁北克水電研究院的Montambault等人于2000年研制成功了輸電線遙控機器人,該遙控機器人可以消除電力傳輸線上的積冰,并可以用來線路巡檢平臺。國內(nèi)關于輸電線路巡線機器人的研究還處于起步階段,只有武漢水利大學、山東大學、中科院等作過一些研究。
2.機器人概述
由于高壓輸電線的線纜附件種類多、形狀復雜,因此,越障成為巡線機器人要具備的首要功能。本文所述的機器人采用3個自由擺動的吊臂跨越線纜附件,當遇到障礙物時擺動3個吊臂,使3個吊臂依次通過障礙物。機器人本體如圖1所示,該機器人可以在四分裂、二分裂、單股等高壓輸電線纜上爬行,可自主跨越懸垂絕緣子、隔離棒、防振錘、線夾等線纜附件,具有輸電線纜的檢測功能。機器人綜合性能指標如下:1)本體外形:850×300×700mm;2)本體重量45Kg;3)纜徑適應性Ф10~Ф25mm;4)移動速度0~25m/min;5)爬升角度0~30°;6)控制方式:自主運行和主從遙控操作;7)故障處理:手動/自動。

3.控制系統(tǒng)的設計
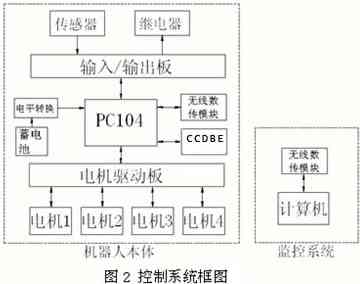
機器人的控制系統(tǒng)分本體控制系統(tǒng)和地面監(jiān)控系統(tǒng)兩部分,如圖2 所示。本體控制系統(tǒng)用來規(guī)劃機器人的運動軌跡,控制機器人運動構件,確保機器人可靠快速的越過障礙物,并實現(xiàn)與地面基站的命令、數(shù)據(jù)的遠距離傳輸;地面監(jiān)控系統(tǒng)實現(xiàn)機器人的手動/自動控制,并監(jiān)控機器人的穩(wěn)定運行。為機器人設計自動和手動兩套控制系統(tǒng)的增加了機器人的靈活性與可靠性,當其中一套系統(tǒng)發(fā)生故障時可啟動另一套控制系統(tǒng),另外在某些特殊的場合可只用手動系統(tǒng),降低了機器人野外作業(yè)的難度,增加了機器人的應用性。
3.1 機器人本體控制系統(tǒng)的設計
機器人本體的控制系統(tǒng)以嵌入式PC104工控機為核心,并配有輸入輸出擴展板HT-750和A/D采集擴展板PM-516。采用PC104 作為核心模塊, 可將主要精力放在軟件和接口的設計上, 而且PC104 的開發(fā)、維護和擴展都非常方便。PC104與通用PC和PC/AT標準(IEEE P996) 完全兼容, 可以很快掌握其軟、硬件的使用, 并且具備嵌入式控制的特殊要求,為嵌入式應用提供了標準的系統(tǒng)平臺[1]。
3.1.1故障檢測
輸電線纜附件種類多,形狀復雜,對機器人判斷障礙物類型帶來了極大的困難。因此有必要攜帶多種傳感器,將多種線路故障檢測器集成到巡線機器人移動平臺上,運用多傳感器信息融合技術,以便提高故障探測的效率、精度和準確度。主要的傳感器有CCD視覺模塊、紅外溫度傳感器、超聲波傳感器等。
視覺檢測CCD模塊使用PC104上的COM2串口,用于識別高壓輸電線各類附件,從原始圖像中找到目標(防振錘、絕緣子、連接金具、隔離棒等附件)所在區(qū)域,利用圖像處理技術,提取障礙物特征尺寸,自動判斷輸電線路上的障礙物類型、距離,并向機器人運動控制單元提供越障信息[2],形成下一步的越障策略。另外,視覺檢查一般能發(fā)現(xiàn)架空線表面故障現(xiàn)象,如輸電線表面損傷,連接金具松脫等;紅外溫度傳感器則利用高壓輸電線在故障點會產(chǎn)生異常溫升的特點,檢測線纜的異常溫升。本文使用PerkinElmer公司的A2TPMI-334傳感器來檢測線纜的異常溫升,以達到檢測線纜故障的目的。
3.1.2運動控制
由于機器人的動作較復雜,多數(shù)吊臂式巡線機器人采用多電機驅(qū)動方案,即用6個電機實現(xiàn)擺動吊臂與行走輪轉動。這種方案機器人較為靈活,但多電機增加了機器人的重量,不利于機器人自身平衡。本文用2個電機實現(xiàn)需要的動作,通過3個電磁離合器與圖2中的電機1配合控制三個吊臂的擺動,用電機2控制機器人行走。為了增加檢測的靈活性,在機器人上增加了兩個可升降的傳感器支架,分別用電機3和電機4帶動。驅(qū)動框圖如圖3所示,用Silicon Lab公司的高性能單片機C8051F047和H橋組件LMD18200T來驅(qū)動電機。LMD18200T是美國國家半導體公司(NS)推出運動控制專用H橋組件,內(nèi)部集成了CMOS控制電路和DMOS驅(qū)動電路,峰值輸出電流高達6A,連續(xù)輸出電流3A,工作電壓高達55V,具有溫度報警和過熱與短路保護功能。本文所選電機的連續(xù)堵轉電流在3A左右,因此選用LMD18200T芯片可以滿足使用要求。

電機1與電機2使用數(shù)字PID算法調(diào)速。數(shù)字PID算法是一種常用的控制算法,由等間隔時間光電編碼器的數(shù)值與給定的速度值進行比較,通過PID算法,改變C8051F047的PWM的占空比,實現(xiàn)電機的閉環(huán)控制,即:

(1)其中Kp為比例系數(shù), Ki為積分系數(shù), Kd為微分系數(shù), T為采樣周期[3]。電機3和電機4只用來控制支架升降,對速度無具體要求,因此只需采集編碼器脈沖數(shù)。
3.1.3 數(shù)據(jù)傳輸
機器人爬行時,要將自身狀態(tài)信息、采集到的數(shù)據(jù)、抓拍的圖片等信息發(fā)送給監(jiān)控系統(tǒng);而在特殊情況下,監(jiān)控系統(tǒng)也要向機器人發(fā)送指令,這就需要在兩者之間傳輸數(shù)據(jù)。設計傳輸距離<2Km,本文使用一對無線數(shù)傳模塊SRWF-108完成此功能。機器人本體的SRWF-108占用PC104上的COM1端口[4],波特率9600bps,8位數(shù)據(jù)位,共有狀態(tài)幀、指令幀和文件幀三種格式。
3.1.4 電源設計
巡線機器人在高空作業(yè),只能使用自備電源。本文使用4節(jié)12V鉛酸蓄電池,由B1205S、B1212S、LM2678等電源轉換芯片得到系統(tǒng)需要的+12V, ±5V等電平。為了保證機器人有充足的能源,有必要監(jiān)控電池電量,本文使用DS2438Z芯片,DS2438Z芯片是DALLAS 公司推出的新一代智能電池監(jiān)測芯片,具有功能強大、體積小、價格低廉等優(yōu)點,并且用1-Wire總線傳輸數(shù)據(jù),硬件接線簡單,可用來檢測電池溫度,電壓剩余電量等參數(shù)。當發(fā)現(xiàn)電池電量不足時,機器人本體會向監(jiān)控系統(tǒng)發(fā)出報警,提示更換電池。

3.1.5 控制系統(tǒng)的軟件
PC104控制系統(tǒng)的軟件用C語言編程,開發(fā)周期短,效率高。程序需實現(xiàn)數(shù)據(jù)采集、系統(tǒng)狀態(tài)檢測、串行通訊、動作輸出、故障處理、異常情況處理、電源監(jiān)測等功能,其程序流程圖如圖4所示。與監(jiān)控系統(tǒng)的數(shù)據(jù)傳輸可以采用查詢或中斷方式,查詢方式的優(yōu)點是編程容易,但會占用較多的系統(tǒng)資源,中斷方式則與之相反。機器人除了要進行串口通訊還要完成電機控制、故障處理等功能,因此查詢方式不宜使用,本文使用中斷方式。初始化COM1和COM1中斷處理程序[5]如下:
void InitCOM() /* 初始化COM1串口,設置串口參數(shù)*/
{ outportb(0x3fb,0x80); /*將設置波特率*/
outportb(0x3f8,0x0c); /*波特率9600*/
outportb(0x3f9,0x00);
outportb(0x3fb,0x03); /*8個數(shù)據(jù)位,1個停止位、無奇偶校驗*/
outportb(0x3fc,0x08|0x0b);/*設置MCR*/
outportb(0x3f9,0x01); /*開中斷*/ }
void interrupt far asyncint()
{ char ch;
ch=inportb(0x3f8);/*ch 為接收到的字符數(shù)據(jù)*/
…… ……}
3.2 監(jiān)控系統(tǒng)的設計
監(jiān)控系統(tǒng)用Visual Basic 6.0軟件開發(fā),VB具有面向?qū)ο蟮目梢暬O計工具、事件驅(qū)動編程機制、強大的數(shù)據(jù)庫操縱功能、Active技術以及應用程序集成開發(fā)環(huán)境等優(yōu)點。根據(jù)機器人系統(tǒng)的要求,采用模塊化思想開發(fā)了較完善的監(jiān)控系統(tǒng),其可擴展性較強,具有電池電量監(jiān)測、運動狀態(tài)監(jiān)測、線纜故障數(shù)據(jù)庫查詢、手動自動切換等功能。能將輸電線的故障信息保存在Access數(shù)據(jù)庫中,并對故障類型、時間進行查詢。
4.結束語
本文提出了一種以PC104模塊為核心的機器人控制系統(tǒng),解決了機器人的自主越障問題,并能識別部分線纜附件,進行無線數(shù)據(jù)傳輸,檢查線纜狀況等,為高壓輸電線的自動檢測提供了便利。