
直流電動(dòng)機(jī)具有良好的起制動(dòng)性能,能大范圍內(nèi)平滑調(diào)速,因而在可控的電力拖動(dòng)領(lǐng)域中得到了廣泛的應(yīng)用。然而傳統(tǒng)的直流調(diào)速系統(tǒng)所采用的是由分立元件構(gòu)成的復(fù)雜PID模擬控制系統(tǒng)。常規(guī)PID控制雖然具有結(jié)構(gòu)簡(jiǎn)單、穩(wěn)定性好、易于工程實(shí)現(xiàn)等優(yōu)點(diǎn),但該方法過分依賴控制對(duì)象的模型參數(shù),魯棒性差。對(duì)于復(fù)雜系統(tǒng)如對(duì)機(jī)器人的控制,由于其負(fù)載模型參數(shù)的大范圍變化以及非線性因素的影響,常規(guī)PID控制難以達(dá)到滿意的效果。本文提出一種基于LM3S8962 ARM芯片的模糊控制系統(tǒng),以替代傳統(tǒng)的PID模擬控制,提高直流調(diào)速系統(tǒng)的控制性能。
1 控制系統(tǒng)的控制方案
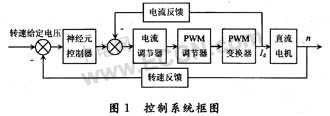
系統(tǒng)控制框圖如圖1所示,采用串級(jí)控制,分為轉(zhuǎn)速環(huán)(外環(huán))和電流環(huán)(內(nèi)環(huán))。為了提高系統(tǒng)響應(yīng)的快速性和限流的必要性,電流環(huán)仍采用傳統(tǒng)的PI調(diào)節(jié)器,而轉(zhuǎn)速則采用神經(jīng)元控制器,以提高其魯棒性。
單神經(jīng)元自適應(yīng)PSD算法控制框圖見圖2。
2 單神經(jīng)元PSD自適應(yīng)控制算法
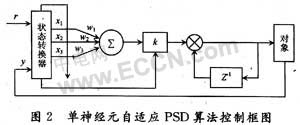

圖2中狀態(tài)轉(zhuǎn)換器的輸人為設(shè)定值r(k)和過程輸出y(k),轉(zhuǎn)換器的作用是獲得單神經(jīng)元的三個(gè)輸入量x1(k),x2(k),x3(k),在這里:
其中:Wi(k)(i=1,2,3)為對(duì)應(yīng)于神經(jīng)元輸入xi(k)的加權(quán)系數(shù)。
控制器總輸出為:
z(k)為教師信號(hào),在這里取z(k)=e(k)。這是因?yàn)榭刂菩Ч饕ce(k)和△e(k)有關(guān)。為了保證學(xué)習(xí)算法的收斂性和控制的魯棒性,一般采用規(guī)范化學(xué)習(xí)算法以構(gòu)成單神經(jīng)元PSD控制規(guī)律,所以單神經(jīng)元自適應(yīng)PSD的控制算法如下:

控制系統(tǒng)以LM3S8962為核心,LM3S8962是基于ARM?CortexTM-M3的32位RISC控制器,具有內(nèi)部存儲(chǔ)器、4個(gè)通用定時(shí)器、遵循ARM FiRM規(guī)范的看門狗定時(shí)器、控制器局域網(wǎng)(CAN)、10/100以太網(wǎng)控制器、同步串行接口(SSI)、2個(gè)完全可編程的UART、4個(gè)10位ADC、模擬比較器、I2C、6個(gè)PWM輸出、2個(gè)QEI模塊。
3 控制系統(tǒng)的硬件設(shè)計(jì)
系統(tǒng)主電路采用晶閘管三相全控橋式電路,控制電路主要由LM3S8962芯片構(gòu)成,一是完成速度脈沖的采樣、控制算法的實(shí)現(xiàn)和控制極脈沖的輸出等。二是完成起、停控制,鍵盤及顯示器接口等。系統(tǒng)硬件方框圖如圖3所示。

從LM3S8962芯片出來的PWM輸出信號(hào),經(jīng)過光電隔離驅(qū)動(dòng),送入晶閘管控制極,實(shí)現(xiàn)對(duì)全控橋的控制。
電流檢測(cè)回路采用霍爾電流傳感器CSNP661檢測(cè)直流電流Id,當(dāng)檢測(cè)到電流值超過設(shè)定的限幅值時(shí)ARM立即進(jìn)行中斷處理,封鎖輸出給晶閘管的PWM信號(hào),并發(fā)出聲光報(bào)警信號(hào)。
系統(tǒng)采用測(cè)速發(fā)電機(jī)測(cè)量電動(dòng)機(jī)轉(zhuǎn)速,把轉(zhuǎn)速信號(hào)轉(zhuǎn)換成電壓信號(hào),經(jīng)分壓電阻送給ARM的ADC轉(zhuǎn)換輸入中斷。
4 控制系統(tǒng)軟件設(shè)計(jì)
軟件結(jié)構(gòu):本系統(tǒng)軟件采用功能模塊設(shè)計(jì)方法,軟件由系統(tǒng)、主程序、中斷服務(wù)子程序及其他相關(guān)的子程序組成。
主程序主要完成芯片的初始化、變量的初始化等。
中斷程序主要包括ADC轉(zhuǎn)換結(jié)束中斷等幾個(gè)部分。
在串行口中斷中,主要完成與主機(jī)信息的傳輸,根據(jù)制定的串行通信協(xié)議,按照主機(jī)的命令進(jìn)行各種動(dòng)作。
在ADC中斷中,通過ADC轉(zhuǎn)換的數(shù)值經(jīng)過計(jì)算得到當(dāng)前負(fù)載電流值,進(jìn)行電流環(huán)調(diào)節(jié),每經(jīng)過一定次數(shù)電流環(huán)調(diào)節(jié),就進(jìn)行一次速度環(huán)調(diào)節(jié),以保證系統(tǒng)按照要求進(jìn)行控制。
5 仿真實(shí)驗(yàn)
為檢驗(yàn)本系統(tǒng)的控制性能,對(duì)直流電機(jī)(額定數(shù)據(jù):380 V,37 A,200 r/min)進(jìn)行了空載起動(dòng)和突加負(fù)載的仿真實(shí)驗(yàn),得出電流和轉(zhuǎn)速的變化曲線如圖4和圖5所示。

6 結(jié)語
實(shí)驗(yàn)結(jié)果表明,本系統(tǒng)結(jié)構(gòu)簡(jiǎn)單,控制可靠,能保持快速響應(yīng)及無靜差和較小超調(diào)等優(yōu)良性能,采用了高性能高精度的ARM芯片的模糊控制器,能達(dá)到很高的控制精度。同時(shí),系統(tǒng)具有較強(qiáng)的擴(kuò)展能力,可以通過串行口或者以太網(wǎng)與上位機(jī)通信。