
引言
目前,倒車已出現(xiàn)兩種新技術(shù): 超聲波測(cè)距和后視攝像。
倒車?yán)走_(dá)和后視攝像各有利弊,前者具有確切判斷距離的優(yōu)點(diǎn),但對(duì)車后方的水溝、山崖、凸出的鋼筋、竹桿等,超聲波無(wú)法感應(yīng),這也是倒車安全上的死角;后者圖像直觀真實(shí),但無(wú)法獲得精確的距離。如何把兩者的優(yōu)點(diǎn)結(jié)合起來(lái),消除兩者的缺點(diǎn)是倒車多媒體可視測(cè)距終端解決的重點(diǎn)難題。
倒車多媒體可視測(cè)距終端運(yùn)用了最新的超聲波測(cè)距技術(shù)、字符產(chǎn)生和疊加技術(shù)、視頻顯示技術(shù),實(shí)現(xiàn)了倒車測(cè)距和圖像監(jiān)視功能的組合,是一種用于檢測(cè)車后物距和監(jiān)視車后圖像的電子設(shè)備,其有三大功能:
第一功能:超聲波測(cè)距-------嵌入式超聲波測(cè)距,使泊車測(cè)距精確。
第二功能:后視攝像系統(tǒng)------拍攝車后景物圖像,直觀無(wú)死角。
第三功能:車載電視------顯示車后景物圖像和車后障礙物距離,并可連接VCD\DVD,收看電視節(jié)目,提供娛樂(lè)休閑。
硬件電路設(shè)計(jì)
倒車多媒體可視測(cè)距終端由開(kāi)關(guān)電源、超聲波探頭、超聲波測(cè)距、OSD顯示控制器、攝像探頭、車載電視6部分組成(見(jiàn)圖1),OSD顯示控制器由微處理器W87E58、字符疊加器uPD6453、時(shí)鐘芯片DS12C887、鍵盤、超聲波測(cè)距接口電路CON4 、字符疊加接口CON2、RS-485接口電路、指示燈D1和D4、蜂鳴驅(qū)動(dòng)電路S2和蜂鳴器U5驅(qū)動(dòng)器以及切換電路組成。時(shí)鐘芯片用于產(chǎn)生時(shí)間信號(hào),通過(guò)并行總線進(jìn)入CPU;超聲波測(cè)距信號(hào)通過(guò)接口CON4進(jìn)入CPU;字符疊加信號(hào)由CPU輸出給字符疊加控制器,由字符疊加控制器完成時(shí)間、距離信息與視頻的疊加。鍵盤用于時(shí)間的調(diào)整和功能設(shè)定;指示燈D1和D4用于指示工作狀態(tài);蜂鳴電路用于報(bào)警。
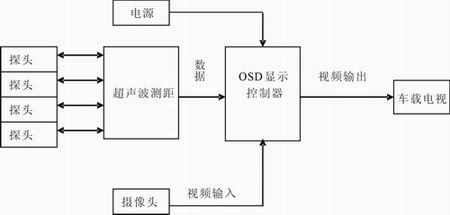
圖1 倒車測(cè)距監(jiān)視器組成框圖
倒車多媒體可視測(cè)距終端工作原理為:將來(lái)自于汽車尾部保險(xiǎn)杠安裝的超聲波信號(hào)接入OSD顯示控制器,同時(shí)將視頻監(jiān)視子系統(tǒng)中的攝像探頭信號(hào)接入OSD顯示控制器,通過(guò)安裝在汽車內(nèi)部的OSD顯示控制器的自動(dòng)切換電路、字符疊加器 、微處理器,將OSD顯示控制器的輸出再接入監(jiān)視器,這樣實(shí)現(xiàn)自動(dòng)切換圖像、監(jiān)視、超聲波倒車測(cè)距、自動(dòng)報(bào)警等功能。OSD顯示疊加器使用了OSD專用芯片,來(lái)實(shí)現(xiàn)字符疊加:輸入的視頻信號(hào)先進(jìn)行同步分離,分離出行、場(chǎng)同步信號(hào)作為OSD的基準(zhǔn)信號(hào),然后,OSD芯片輸出紅基色電壓Vr、綠基色電壓Vg、蘭基色電壓Vb信號(hào)進(jìn)行編碼,編碼后產(chǎn)生的視頻信號(hào)與輸入的視頻信號(hào)同步。兩路視頻信號(hào)進(jìn)行高速切換,切換的鍵控脈沖是信號(hào),即只要有字符信號(hào),就切換到字符信號(hào)編碼的視頻信號(hào)上去,結(jié)果在輸入的視頻信號(hào)的圖像上摳像,摳去部分由字符信號(hào)取代。
它的優(yōu)點(diǎn)是:可安裝在任何一種車輛上作倒車用。倒車時(shí),司機(jī)不用打開(kāi)車門,即可從監(jiān)視器中清晰可見(jiàn)車后景物;CCD彩色或黑白廣角攝像探頭,角度為80°,水平距離為0.3~1.5米;后景是正像顯示,無(wú)畸變,無(wú)幾何失真;工作電壓為DC12V,可與汽車電源共用。
系統(tǒng)軟件設(shè)計(jì)
倒車多媒體可視測(cè)距終端的OSD顯示控制器中采用微處理器W87E58,軟件采用C語(yǔ)言編程。車后圖像和測(cè)距數(shù)據(jù)流向如圖2所示。

圖2 信息流程圖
限于篇幅,程序代碼就不在這里詳述了。
結(jié)語(yǔ)
本倒車測(cè)距多媒體終端具備的功能強(qiáng),測(cè)距準(zhǔn)確,已經(jīng)開(kāi)發(fā)成功并運(yùn)用在車輛中。