
摘要:結合link" href="http://forexkbc.com/tags/CAN" title="CAN" target="_blank">CAN總線和LIN總線各自的優(yōu)缺點,設計實現(xiàn)了基于CAN/LIN總線的分層式車門控制系統(tǒng),首先講述了集中式控制系統(tǒng)結構和分布式控制系統(tǒng)結構的實現(xiàn)及相應的特點,論述了選定分布式結構的原因,然后詳述了車門分布式系統(tǒng)的實現(xiàn)及相關技術。
關鍵詞: 總線;CAN;LIN;車門控制
引言
隨著各種傳感器的出現(xiàn)和芯片技術的飛速發(fā)展,汽車的安全性和智能化程度日益提高,汽車電子控制單元(ECU)的功能和ECU間的信息交互日益增加,汽車生產(chǎn)商開發(fā)了多種總線技術,提供可靠而低成本的連接,按照安全性、智能性的不同要求實現(xiàn)相應的網(wǎng)絡結構[1],滿足單元間不同要求的數(shù)據(jù)交換。對車門區(qū)域的控制而言,要實現(xiàn)的功能較多,包括車窗升降、后視鏡的位置調整、門鎖開關、開關量的檢測等,針對不同的目標客戶群,可選擇實現(xiàn)的智能也較多,包括車窗防夾,后視鏡折疊和加熱等,筆者采用低速CAN總線和LIN總線實現(xiàn)了車門分布式控制系統(tǒng),選擇性地實現(xiàn)了部分智能,該系統(tǒng)同時可以迅速修改和升級,而不需要太大的設計變動。本文講述下系統(tǒng)結構的確定和分布式控制的具體實現(xiàn)。
系統(tǒng)結構的確定
車門控制系統(tǒng)采用總線式拓補結構,總線一般采用低速CAN總線或LIN總線,采用不同總線協(xié)議和不同的拓補結構可以提供不同程度的智能。第一種方案是每個車門采用一個集中控制的CAN節(jié)點,BSI和四個車門通過一個CAN網(wǎng)絡連接,如圖1所示。

圖1 車門集中式控制方案
第二種方案是每個車門采用分布式LIN網(wǎng)結構,將各個功能做成單獨的節(jié)點,即單獨的后視鏡控制節(jié)點,車窗控制節(jié)點,門鎖控制節(jié)點,開關輸入控制節(jié)點,該開關輸入控制節(jié)點可以同時作為LIN的主節(jié)點,每個車門的主節(jié)點同時為CAN-LIN網(wǎng)關節(jié)點,BSI和四個車門通過CAN網(wǎng)連接。如圖2所示。

圖2 車門分布式控制方案
方案1是目前大量生產(chǎn)商采用的典型方案,這種集中控制的方式將車窗升降及防夾、后視鏡的位置調整、門鎖、開關量的輸入檢測集中在一個ECU中實現(xiàn),成本較低,采用低速CAN總線連接,拓補結構簡單,通訊簡單實時,協(xié)議的制定比較簡單,且CAN采用多主雙線容錯機制,故安全性較高,基于CAN總線的診斷也使得故障的查找和維修比較方便。
隨著技術的發(fā)展和消費者對汽車智能化的追求,汽車智能化程度的提高和迅速升級換代是保證汽車廠商競爭力的關鍵因素,采用單一CAN總線集中控制的缺點也開始暴露出來。由于車門節(jié)點內的高性能MCU直接控制車窗和車鏡,當ECU的智能性要求越來越高,需要增加功能或智能時,只能增強各個集中控制節(jié)點的MCU功能,造成MCU規(guī)格增大;且集中控制安裝復雜,接插件和連接線纜較多,當智能增加時,互連數(shù)量增加,缺乏靈活性,產(chǎn)品升級換代需要大量成本,最終導致效率降低[2]。
分層式網(wǎng)絡是解決汽車產(chǎn)品低成本迅速升級換代的有效解決方案,LIN總線作為CAN總線的有效補充,是分層式汽車網(wǎng)絡特征升級和功能增強的關鍵因素[3],利用方案2所示CAN-LIN分層式網(wǎng)絡結構,充分發(fā)揮了CAN/LIN總線各自的優(yōu)勢,將部分功能移植到更小,更可靠的節(jié)點,降低了各個ECU的復雜度,且四個門內的各LIN節(jié)點可以通用,互換性和兼容性更好,可以根據(jù)車門功能的配置要求隨時添加或者減掉某個節(jié)點,而不會對整個網(wǎng)絡產(chǎn)生任何影響,從而可以迅速升級換代,而不會帶來更大的成本消耗。
單芯片傳感器和執(zhí)行器的出現(xiàn)提供了分布式節(jié)點的低成本解決方案,給采取分布式技術降低成本提供了可能。隨著LIN總線技術的不斷成熟,對MCU和LIN狀態(tài)機進行合適的選擇,就可以獲得功能更強大、更靈活的分布式系統(tǒng)。
分布式控制的實現(xiàn)
在車門系統(tǒng)的分布式控制實現(xiàn)中,每個車門均為一個LIN網(wǎng)絡,前車門包括車窗節(jié)點,后視鏡節(jié)點和門鎖節(jié)點,后車門不包括后視鏡節(jié)點,以下從分布式節(jié)點的實現(xiàn)和網(wǎng)關的實現(xiàn)兩個方面論述一下車門分布式控制系統(tǒng)的實現(xiàn)。
后視鏡節(jié)點
后視鏡節(jié)點方案如下圖所示,實現(xiàn)對后視鏡上下、前后兩個方向的位置調整,實現(xiàn)折疊功能和加熱功能,采用飛思卡爾的智能分布式控制單芯片MM908E625實現(xiàn),MM908E625是一個高度集成的單封裝解決方案,在一個SOIC54的封裝內集成了HC08內核和SmartMOS模擬控制IC,該模擬控制IC包括LIN物理層收發(fā)器,電壓調整器,4個半H橋和一個高端開關,采用半H橋實現(xiàn)對后視鏡電機的驅動從而實現(xiàn)位置調整和折疊,利用高端開關實現(xiàn)后視鏡加熱。

圖3 后視鏡節(jié)點方案
車窗節(jié)點
車窗節(jié)點方案如下圖所示。實現(xiàn)車窗升降及防夾,采用帶電流反饋的智能功率驅動芯片,設計基于電流反饋的小算法,可以實現(xiàn)防夾功能。當車窗電機啟動后,經(jīng)過百毫秒級的時間便可以平穩(wěn)運行,在這段啟動時間后對驅動芯片的電流反饋值取樣,經(jīng)車窗ECU上的MCU內的ADC采樣與閾值比較,如果碰到障礙物,車窗電機運轉電流增大,ADC采樣值超過設置的閾值,這時認為碰到了障礙物,MCU控制驅動芯片停止對車窗電機的驅動,從而實現(xiàn)了防夾。
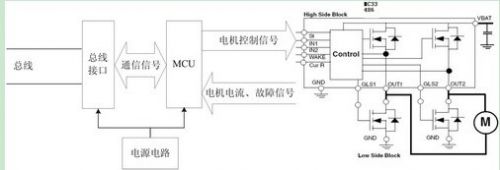
圖4 車窗節(jié)點方案
網(wǎng)關
每個車門LIN網(wǎng)的主節(jié)點完成該車門區(qū)域的開關狀態(tài)檢測,控制所有在該LIN網(wǎng)絡上的通信,設計合理的進度表控制每個信息幀的傳輸,同時有效控制關鍵信號的最大傳輸延遲。該節(jié)點同時是CAN-LIN網(wǎng)關節(jié)點,完成CAN網(wǎng)和LIN網(wǎng)間的數(shù)據(jù)緩沖和信息交換。
結語
本文綜合考慮了不同系統(tǒng)結構的優(yōu)缺點和汽車產(chǎn)品智能化和更新?lián)Q代的要求,設計實現(xiàn)了基于CAN/LIN總線的車門分布式控制系統(tǒng),系統(tǒng)運行良好,具有一定的實用價值。