
1 引言
射頻識別(
針對工作頻率為100kHz一150kHz的電子標簽EM4100.本文提出了其識讀終端的設(shè)計。
2 無源射頻芯片EM4100工作基理
EM4100系列為微型低功耗電子標簽芯片,工作頻率范圍為100kHz~ 150kHz,主時鐘及工作電源取自識讀器發(fā)射的信號。作為接收天線的線圈和微芯片已連好并封裝在一起。內(nèi)部電路分
無源電子標簽與識讀器之間的作用距離滿足關(guān)系r<<λ(工作波長),根據(jù)天線理論,屬于天線近區(qū)場(即感應(yīng)場)。因此,電子標簽天線與識讀終端天線之間的作用是基于電磁感應(yīng)原理,等效電路見圖1。其中,Ll為識讀器發(fā)射天線電感,L2為電子標簽線圈電感,R2為電子標簽線圈的內(nèi)阻,R L為電子標簽諧振回路的等效負載。
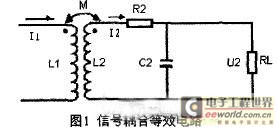
互感M在 L2上產(chǎn)生的電壓 作為 L2回路的信號源,由等效電路可推得回路的輸出電壓表達式:

在其他因素不變時,若識讀終端發(fā)射的信號頻率與該諧振電路的諧振頻率(![]() ) 相等,則輸出電壓最大;偏離諧振頻率時,電壓將快速減小。諧振信號經(jīng)整流濾波后作為片工作電源,當該電壓值達到EM4100的要求時,芯片啟動工作。該諧振電路的輸出電壓值取決于Q值、交變磁場強度及頻率。顯然,電子標簽與識讀終端之間的距離直接影響該電壓值。
) 相等,則輸出電壓最大;偏離諧振頻率時,電壓將快速減小。諧振信號經(jīng)整流濾波后作為片工作電源,當該電壓值達到EM4100的要求時,芯片啟動工作。該諧振電路的輸出電壓值取決于Q值、交變磁場強度及頻率。顯然,電子標簽與識讀終端之間的距離直接影響該電壓值。
在時鐘提取電路從線圈感應(yīng)信號提取的主時鐘作用下,序列發(fā)生器發(fā)出存儲器尋址、數(shù)據(jù)串行輸出控制、數(shù)據(jù)編碼控制等信號。芯片內(nèi)存貯有唯一的64bit代碼:9bit起始位、40bit信息位、14bit校驗位、lbit停止位。代碼經(jīng)編碼后控制調(diào)制器中的電流開關(guān).實現(xiàn)對f0=125kHz載波進行調(diào)幅。每bit數(shù)據(jù)的時間寬度與載波周期的比率有3種選擇:64、32、16。數(shù)據(jù)信號控制應(yīng)答器天線負載的接通和斷開.識讀器天線上電壓將跟隨變化,實際是應(yīng)答器(電子標簽)數(shù)據(jù)對識讀器天線電壓進行振幅調(diào)制,實現(xiàn)了應(yīng)答器數(shù)據(jù)向識讀器的傳輸。這就是所謂的負載調(diào)制。在識讀終端有效作用范圍內(nèi),電子標簽循環(huán)發(fā)送64bit代碼數(shù)據(jù),實現(xiàn)數(shù)據(jù)向識讀終端的傳送。
3 識讀終端硬件系統(tǒng)設(shè)計
3.1功能分析
根據(jù)上述識讀終端與無源電子標簽作用過程.識讀終端應(yīng)實現(xiàn)以下功能:1.發(fā)射射頻信號。信號頻率應(yīng)等于電子標簽接收回路的諧振頻率,信號有足夠 的強度.以啟動電子標簽工作并滿足對作用距離的要求。2.接收電子標簽發(fā)射的射頻信號,并解調(diào)出其中的數(shù)據(jù)。3.數(shù)據(jù)解碼及后續(xù)處理。終端硬件系統(tǒng)實現(xiàn)前 2項功能,第3項功能由識讀終端軟件系統(tǒng)實現(xiàn)。
3.2射頻接口電路設(shè)計與實現(xiàn)
射頻接口電路實現(xiàn)啟動電子標簽和信號解調(diào)。系統(tǒng)采用RFID專用無線基站芯片EM4095設(shè)計了電子標簽與識讀終端主控模塊之間的射頻接口電路。EM4095功能原理見圖2。

圖2 射頻接口芯片EM4095原理
EM4095兼容多種傳輸協(xié)議(如EM4OOX、EM4150等),利用內(nèi)部鎖相環(huán)PLL就可得到與天線適合的諧振頻率,而不需外接晶振,工作頻率100kHz一150kHz,具有睡眠模式,與微控制器的接口簡單,采用調(diào)幅同步解調(diào)技術(shù),工作電壓5V。芯片T作受輸入信號SHD和MOD控制。MOD=0時。芯片工作于只讀模式。
SHD=I時,為睡眠模式。芯片供電之后,SHD應(yīng)先為高電平,以對芯片進行初始化,然后再接低電平,芯片即發(fā)射射頻信號;同時。解調(diào)模塊將天 線上AM信號中攜帶的數(shù)字信號取出,并由DEMOD— 0UT端輸出。RDY/CLK端向微控制器提供芯片內(nèi)部的狀態(tài)以及與發(fā)射信號同步的參考時鐘。SHD=I時,RDY/CLK端輸出低電平;SHD由高電平 變?yōu)榈碗娖胶螅?jīng)過約35ms,RDY/CLK端輸出同步時鐘信號,該參考時鐘信號的出現(xiàn)表示發(fā)射模塊和接收模塊已經(jīng)啟動。通過查詢RDY/CLK端信號 狀態(tài),微控制器即可確定從DEMOD—OUT端接收數(shù)據(jù)的時刻。
鎖相環(huán)PLL、天線驅(qū)動器、調(diào)制器組成射頻信號發(fā)送模塊。其中PLL由環(huán)路濾波器、相位比較器、壓控制振蕩器組成。天線線圈接收的信號通過耦合電容輸入DEMOD IN端,該信號與天線驅(qū)動器的輸入信號由相位比較器進行相位比較,形成與相位差對應(yīng)的電壓,作為壓控振蕩器的控制信號,最終實現(xiàn)對天線發(fā)射信號頻率的鎖定。
接收模塊由采樣保持器、濾波器、比較器組成。DE—MOD IN端輸入的AM信號在VCO輸出信號的同步控制下被采樣,采樣輸出信號由端腳CDEC外接的電容隔離直和帶通濾波采樣(消除輸出中的載頻成分、高頻和低頻噪聲)后,經(jīng)異步比較得到對應(yīng)的數(shù)字信號。

組成LC串聯(lián)諧振電路,諧振頻率為:

天線工作電流與諧振電路Q有關(guān),天線線圈串聯(lián)一個電阻可調(diào)節(jié)Q值。
3.3 主控模塊
微控制器負責(zé)啟動EM4095并接收由EM4095解調(diào)的編碼數(shù)據(jù)。采用AT89C52作為微控制器,其內(nèi)部集成了8KB的Flash程序存貯器,256B的RAM, 具有低功耗工作模式。EM4095的DEMOD OUT端接P1.0,EM4095的SHD接P1.1EM4095輸出的參考時鐘信號RDY/CLK端接TO,用作解碼的同步時鐘。AT89C52從電子標簽讀取來的編碼數(shù)據(jù)存貯在EEPROM芯片 AT24C64中。可司通過 MAX232進行電平轉(zhuǎn)換,實現(xiàn)與上位機的通信。識讀終端硬件原理見圖3。

圖3 識讀終端硬件原理圖
AT89C52通過P1.1發(fā)出控制信號啟動EM4095工作,若有效作用范圍內(nèi)有電子標簽。電子標簽接收EM4095發(fā)射的射頻信號能量后發(fā) 送經(jīng)過調(diào)制的編碼信號,AT89C52通過監(jiān)測P1.0的狀態(tài),判斷是否收到射頻接口解調(diào)輸出的數(shù)據(jù),由軟件完成數(shù)據(jù)的接收及后續(xù)的處理任務(wù)。
4 軟件設(shè)計分析
終端軟件要解決的關(guān)鍵問題是如何正確接收數(shù)據(jù),并解碼。本系統(tǒng)選用的電子標簽為Manchester碼型,電子標簽編碼器輸出信號、EM4095解調(diào)輸出信號的波形見圖4。

4.1解調(diào)輸出波特點
電子標簽中的64bit數(shù)據(jù)以NRZ形式的波形串行送人編碼器,經(jīng)編碼后輸出Manchester碼波形。其編碼規(guī)則為:在一個編碼時鐘周期的中間以一個上跳變的波形表示二進制數(shù)據(jù)“1”:在一個編碼時鐘周期的中間以一個下跳變的波形表示二進制數(shù)據(jù)“0”。
編碼輸出信號作負載調(diào)制的控制信號,編碼輸出波形中的低電平使標簽發(fā)射天線線圈工作于高電流,編碼輸出波形中的高電平則使標簽發(fā)射天線線圈工作 于低電流。因此,標簽發(fā)給EM4095的已調(diào)信號,經(jīng)解調(diào)輸出的波形與標簽編碼輸出的波形為反相關(guān)系,即:時鐘周期中間的下跳變表示二進制數(shù)據(jù)“1”,時 鐘周期中間的上跳變波形表示二進制數(shù)據(jù)“0”。根據(jù)圖4的波形,連續(xù)“0”和連續(xù)“1”對應(yīng)的波形是相似的,只是它們之間為反相關(guān)系。因此,如果簡單地把 上升沿或下降沿作為數(shù)據(jù)采樣時刻,會出現(xiàn)“0”譯為“1”或“1”譯為“0”的錯誤。
4.2解碼軟件設(shè)計思路
解碼程序要解決的主要問題是如何防止“0”與“1”之間的倒譯。根據(jù)DEMOD OUT端輸出波形。若DEMOD OUT端連續(xù)輸出一個下跳變和一個上跳變,則肯定是解調(diào)輸出的數(shù)據(jù)。
只在以下2種情況會出現(xiàn)上跳變:數(shù)據(jù)“0”編碼周期的中間:相鄰數(shù)據(jù)都是“1”時,它們波形中間也出現(xiàn)上跳變。但這2種情況存在如下差別:上跳 沿與前一個下跳沿之間的低電平持續(xù)時間不同。若該低電平維持時間大于32個載波周期,則是數(shù)據(jù)“o”編碼周期中間時刻的上跳沿。因此,用指令查詢P1.o 的電平,先找一個下跳變,找到后立刻啟動T0對RDY/CLK參考時鐘計時,接著找到緊隨其后的上跳變,若此時 的計時時間大于32個載波周期,該上跳變位于數(shù)據(jù)“0”編碼周期中間時刻,該上跳變是接收數(shù)據(jù)的時間起點。由于每位數(shù)據(jù)對應(yīng)波形中的高、低電平均為32個 射頻載波周期,以上跳時刻為起點延40個載頻周期后接收第1個數(shù)據(jù)。然后重新啟動計數(shù)器TO,RDY/CLK端輸出的參考時鐘周期等于射頻載波周期,數(shù)據(jù)編碼時鐘周期又固定為該參考時鐘周期的64倍,將Tn設(shè)置為每隔64個載波周期中斷1次,在Tn中斷服務(wù)程序中讀P1.0上的數(shù)據(jù)。
根據(jù)電子標簽中數(shù)據(jù)的結(jié)構(gòu),按上述接收方式首先找作為起始位的9個存在如下差別:上跳沿與前一個下跳沿之間的低電平持續(xù)時間不同。若該低電平維 持時間大于32個載波周期,則是數(shù)據(jù)“o”編碼周期中間時刻的上跳沿。因此,用指令查詢P1.o的電平,先找一個下跳變,找到后立刻啟動T0對 RDY/CLK參考時鐘計時,接著找到緊隨其后的上跳變,若此時 的計時時間大于32個載波周期,該上跳變位于數(shù)據(jù)“0”編碼周期中間時刻,該上跳變是接收數(shù)據(jù)的時間起點。由于每位數(shù)據(jù)對應(yīng)波形中的高、低電平均為32個 射頻載波周期,以上跳時刻為起點延40個載頻周期后接收第1個數(shù)據(jù)。然后重新啟動計數(shù)器TO,RDY/CLK端輸出的參考時鐘周期等于射頻載波周期,數(shù)據(jù) 編碼時鐘周期又固定為該參考時鐘周期的64倍,將Tn設(shè)置為每隔64個載波周期中斷1次,在Tn中斷服務(wù)程序中讀P1.0上的數(shù)據(jù)。
根據(jù)電子標簽中數(shù)據(jù)的結(jié)構(gòu),按上述接收方式首先找作為起始位的9個“1”,找到后,按順序接收其余55bit數(shù)據(jù),并按標簽中數(shù)據(jù)結(jié)構(gòu)重新組織數(shù)據(jù)。然后通過奇校驗程序計算各段數(shù)據(jù)的奇校驗,再與接收到的奇校驗位進行比較,判斷數(shù)據(jù)是否正確性。
5 結(jié)束語
無線射頻識別具有信息量大、高效便捷、安全的特點,是自動識別的主流技術(shù)。低成本、高可靠的便攜式電子標簽識讀終端的研究開發(fā).有很大的實際意義。本文在研究分析系統(tǒng)作用原理及解調(diào)輸出波特征的基礎(chǔ)上,設(shè)計了硬件實現(xiàn)方案,并以射頻參考時鐘為參照,提出了一種解決Manchester碼倒譯問題的軟件解碼方法。系統(tǒng)結(jié)構(gòu)和成本合理,可靠性已得到試驗驗證.有較好的應(yīng)用價值。
本文作者創(chuàng)新點:充分利用工業(yè)通用單片機的豐富資源設(shè)計主控模塊,解決了系統(tǒng)便攜化和低成本難題;以射頻參考時鐘為參照的Manchester碼軟件解碼方法,提高了解碼的準確性.也使系統(tǒng)具有良好的功能擴充和升級能力。