
l 引言
雙向電壓源高頻鏈" title="高頻鏈">高頻鏈逆變器" title="逆變器">逆變器" target="_blank">逆變器因其變換效率高、功率密度大、易于用在大功率場合,目前是光伏逆變電源領(lǐng)域的研究熱點。在電壓源型高頻鏈逆變電源模型的基礎(chǔ)上建立了逆變器連續(xù)時間域和離散時間域的數(shù)學(xué)模型。研究了基于電壓反饋的離散重復(fù)控制" title="重復(fù)控制">重復(fù)控制技術(shù),分析了重復(fù)控制消除輸出電壓周期性波形畸變的原理。最后,應(yīng)用PSIM仿真軟件進行了系統(tǒng)試驗,對關(guān)鍵的試驗波形做出了分析。
2 逆變器主電路數(shù)學(xué)模型的建立
雙向電壓源高頻鏈逆變器原理圖如圖1所示.它是以Forward為基本單元。直流輸入電壓DC通過高頻逆變器逆變,在變壓器原邊得到高頻正負脈沖,通過高頻變壓器進行變壓比調(diào)整和電氣隔離,變壓器副邊得到和原邊相位相同的高頻正負脈沖波,周波變換器對高頻脈沖進行低頻解調(diào),在輸出濾波電路兩端得到低頻交流脈沖電壓,再由濾波電路濾除高次諧波" title="諧波">諧波。
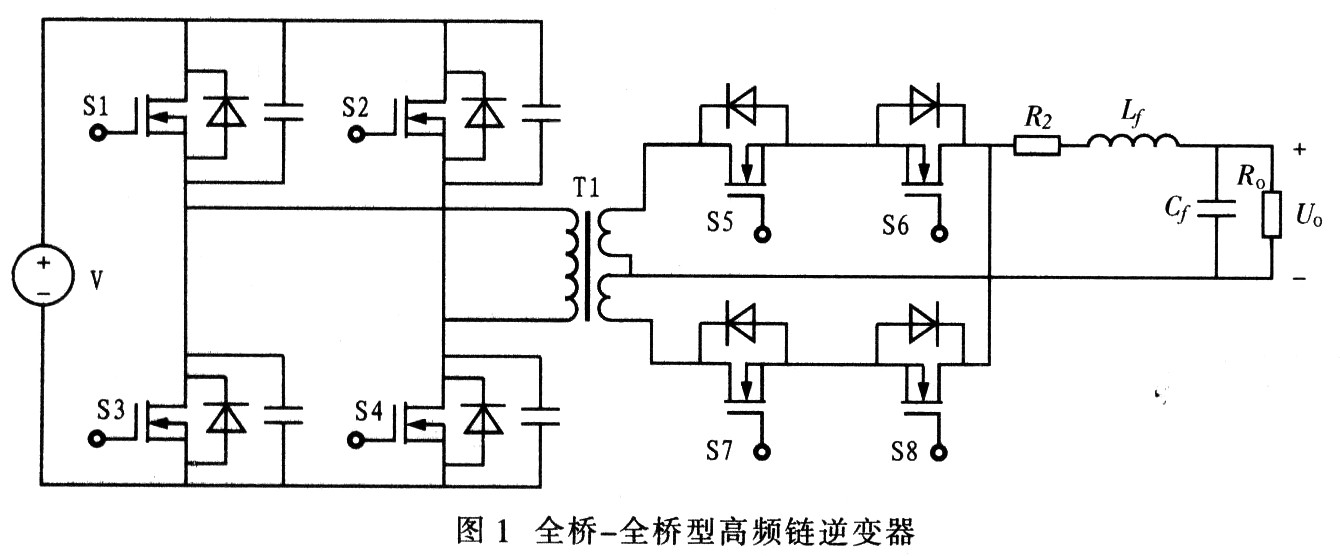
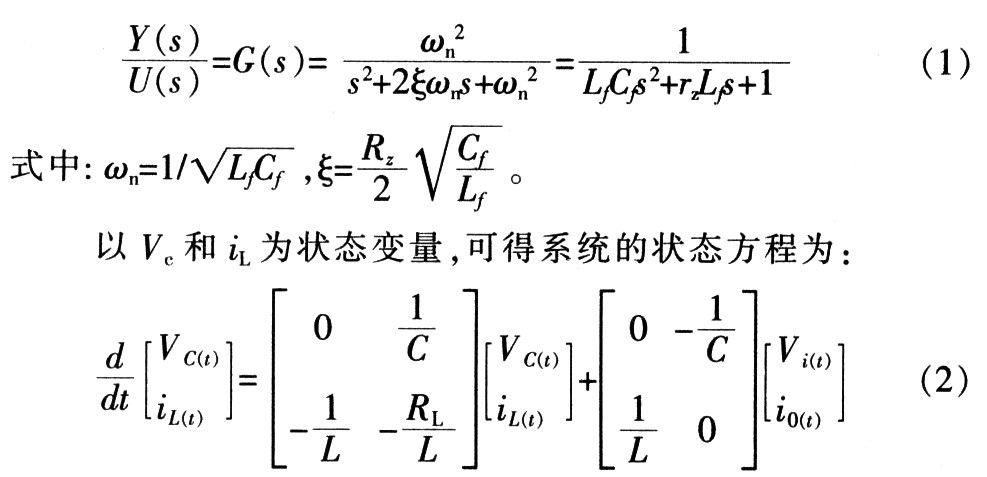
在高頻鏈逆變電源的主電路數(shù)學(xué)模型中,由于逆變器開關(guān)頻率遠遠高于LC濾波器的振蕩頻率。所以逆變器的動態(tài)特性主要由LC濾波器決定,可以將其等效為輸出LC濾波環(huán)節(jié)構(gòu)成的二階系統(tǒng)。設(shè)濾波電感為Lf,濾波電容為Cf,電容、電感以及其他的等效電阻為Rz:。逆變器的等效傳遞函數(shù)為:
采用零階保持器,并選擇合適的采樣周期T,可以將逆變器的等效傳遞函數(shù)離散化,得逆變器的離散化傳遞函數(shù)為:
![]()
實驗主電路中,逆變器的載波頻率為10 kHz,考慮到輸出濾波器截止頻率為該頻率的1/10~1/5,選取Lf=2 mH,Cf=6μF,Rz=1 Ω。
利用MATLAB可求得系統(tǒng)傳遞函數(shù)的離散形式為:
![]()
逆變器的空載阻尼很小,在自然頻率處有較大的諧振峰值。PWM逆變器的輸出電壓誤差主要是由負載擾動、直流側(cè)電壓波動、死區(qū)效應(yīng)等因素引起。誤差頻率分量大多位于中低頻段,系統(tǒng)只要對這些中低頻誤差分量有較強的抑制能力.就可以大幅度地改善諸如諧波失真度(THD%)、電壓穩(wěn)態(tài)誤差等穩(wěn)態(tài)指標(biāo)。因此.對其幅值和相位補償應(yīng)主要集中在中低頻段.即將自然頻率處的幅值衰減到-3 dB以下即可。
3 重復(fù)控制策略
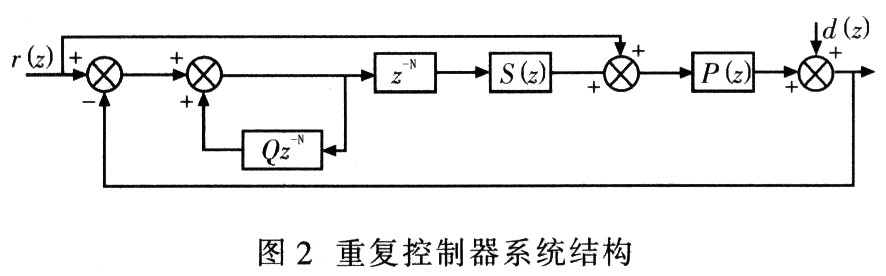
重復(fù)控制是一種基于內(nèi)模原理的控制策略,其作用是當(dāng)輸入信號以基波周期重復(fù)出現(xiàn),輸出對輸人信號的逐周期累加,即使輸入衰減至零,內(nèi)模仍然會持續(xù)不斷地逐周期重復(fù)輸出與上周期波形相同的信號。將這個周期信號保持器引入到反饋控制系統(tǒng)內(nèi)部,并通過補償環(huán)節(jié)使系統(tǒng)穩(wěn)定,可在一個周期內(nèi)跟蹤給定并且消除擾動。重復(fù)控制系統(tǒng)結(jié)構(gòu)如圖2所示,它包括重復(fù)控制器內(nèi)模、周期延時環(huán)節(jié)及補償器S(z)。
3.1 周期延時系數(shù)的選擇
每基波周期對輸出電壓的采樣次數(shù),N=fc/f。其中fc為參考輸入基波頻率,f為載波頻率。
3.2 補償器的設(shè)計
由被控系統(tǒng)P(z)幅頻特性曲線可知:在ω=4 564 rad/s處有一諧振尖峰。補償器S(z)用以消除該諧振峰。選取二階振蕩環(huán)節(jié)在中低頻段與P(z)對消,在高頻段急劇衰減,其中ζ=l,ωn=4 600。為了改善補償性能,設(shè)計中引入Notch函數(shù)![]() 時對諧振尖峰起陷波作用。則完整的補償器形式為:S(z)=S1(z)F(z)。
時對諧振尖峰起陷波作用。則完整的補償器形式為:S(z)=S1(z)F(z)。
3.3 zKKrQ(z)的設(shè)計
被控對象P(z)和補償器S(z)都存在著很大的相位滯后,所以采用相位補償環(huán)節(jié)Zk進行補償。通過相頻曲線比較確定,當(dāng)k=10時,S(z)P(z)與z-10與在中低頻段吻合,相位得到補償。Kr的取值范圍是O~1,類似一個比例控制器的功能。本例中,Kr取0.21可得到滿意的調(diào)節(jié)效果。
Q(z)應(yīng)為接近1的常數(shù),當(dāng)Q(z)取小于1的常數(shù)時,使得原點為Q(z)端點的單位圓整體左移,可以保證系統(tǒng)在全頻段的穩(wěn)定性,本例中取經(jīng)驗值0.95。
3.4 仿真實驗
在阻性和阻感性負載條件下,對系統(tǒng)進行仿真,比較輸出電壓與參考輸入的波形結(jié)果如圖3、圖4所示。
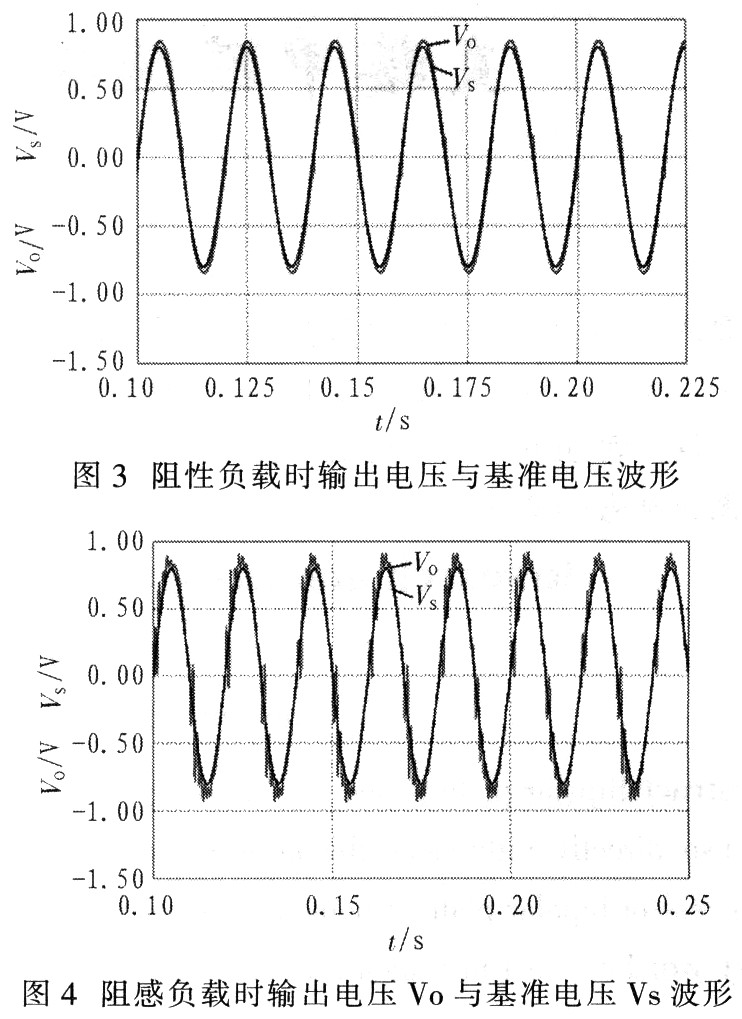
由圖3可以看出,引入重復(fù)控制器后,系統(tǒng)在阻性負載條件下,諧波含量少,輸出電壓波形正弦度好;相位上也與基準(zhǔn)電壓保持一致。波形質(zhì)量較好。由圖4看出.重復(fù)控制對于波形幅值的調(diào)節(jié)效果不如阻性負載時.波形正弦度明顯變差,諧波含量大。這說明重復(fù)控制對于隨機干擾的抑制有一定困難,具有動態(tài)性能差的缺陷。但從結(jié)果也看出,引入重復(fù)控制后,相位調(diào)節(jié)效果好,輸出波形相位與輸入基準(zhǔn)基本保持一致,這一點給逆變器波形控制以及逆變器的并聯(lián)提供了一個有利條件。
4 結(jié)語
分析了逆變器領(lǐng)域常用的雙向電壓源高頻鏈逆變器的結(jié)構(gòu)和原理,研究了基于電壓反饋的離散重復(fù)控制技術(shù)。通過實驗可以看出,引入重復(fù)控制器后,系統(tǒng)輸出波形的諧波含量明顯減少,輸出電壓波形質(zhì)量大大提高;在相位的調(diào)節(jié)上效果更加明顯,使輸出波形能夠在相位上與輸入基準(zhǔn)保持一致,為逆變器的并聯(lián)提供了有利條件。