
摘 要: 提出了一種基于掃描線轉(zhuǎn)換的等值線" title="等值線">等值線快速填充算法。與現(xiàn)有的逐點(diǎn)掃描法和區(qū)域填充算法相比,該算法既不需要進(jìn)行逐點(diǎn)插值" title="插值">插值計(jì)算,也不需要追蹤等值區(qū)域,判斷區(qū)域包含關(guān)系,因而填充速度很快,且填充結(jié)果與區(qū)域填充法結(jié)果一致。實(shí)踐證明該算法可以在毫秒級完成等值線圖的填充。
關(guān)鍵詞: 等值線 掃描線 填充
等值線圖在地質(zhì)、物探、水文等許多工程領(lǐng)域都有廣泛的應(yīng)用,因此等值線圖的自動生成問題一直是人們研究的熱點(diǎn)。一般等值線圖的生成分為等值線生成和等值線填充兩個(gè)部分。目前,等值線的生成方法已經(jīng)很成熟,最常用的是等值線追蹤算法" title="等值線追蹤算法">等值線追蹤算法。近年來關(guān)于等值線填充算法的研究也很多,大致可分為掃描填充和區(qū)域填充兩類。其中掃描填充法出現(xiàn)較早,它通過插值計(jì)算每個(gè)待填充點(diǎn)的顏色值,進(jìn)行逐點(diǎn)填充。算法簡單、可靠,但是填充速度慢,而且與追蹤法生成的等值線存在一些細(xì)微差異,因此目前關(guān)于掃描填充的研究已經(jīng)不多了。區(qū)域填充算法出現(xiàn)較晚[1],是研究的熱點(diǎn)。算法的基本思想是尋找等值區(qū)域,然后利用圖形庫的多邊形填充函數(shù)進(jìn)行充填。該算法對于填充大幅等值線圖效果明顯,但是由于需要追蹤等值區(qū)域并且判斷區(qū)域包含關(guān)系,因此算法比較復(fù)雜,而且對于等值線較多的情況,處理速度也較慢。
考慮到前面兩種算法的不足,本文借鑒了圖形學(xué)中關(guān)于多邊形快速填充的經(jīng)典算法——掃描線轉(zhuǎn)換算法" title="轉(zhuǎn)換算法">轉(zhuǎn)換算法[2],提出了一種利用掃描線填充等值線圖的快速算法。該算法利用掃描線與等值線的拓?fù)潢P(guān)系確定填充顏色,并充分利用掃面線間的相關(guān)性快速填充。無需計(jì)算每個(gè)填充點(diǎn)的顏色值,也無需尋找等值區(qū)域后再進(jìn)行多邊形填充,因此速度明顯優(yōu)于前兩類填充算法,而且填充效果與區(qū)域填充算法一致。
1 等值線追蹤算法
等值線追蹤是生成等值線圖的第一步。目前等值線追蹤算法的研究已經(jīng)比較成熟,根據(jù)追蹤的原始數(shù)據(jù)不同,分為規(guī)則矩形網(wǎng)格追蹤[3]和三角網(wǎng)追蹤[4]兩類。其中常用的等值線繪制軟件Surfer就是基于矩形數(shù)據(jù)網(wǎng)格的。當(dāng)然矩形網(wǎng)格不能用于不規(guī)則的圖形,因此后來又出現(xiàn)了基于三角網(wǎng)的等值線追蹤方法。本文主要介紹等值線填充算法,因?yàn)樘畛渌惴▋H需要利用等值線追蹤的結(jié)果,而與具體采用何種追蹤方法無關(guān),因此這里不過多討論等值線追蹤算法,僅以矩形網(wǎng)格追蹤為例進(jìn)行簡要說明。
等值線追蹤的第一步是,計(jì)算出所有對應(yīng)某一值的等值點(diǎn)在網(wǎng)格邊線上的坐標(biāo)。這對于矩形網(wǎng)格來說比較簡單:先判斷網(wǎng)格邊線上是否存在等值點(diǎn),如果存在則利用線性插值計(jì)算等值點(diǎn)在網(wǎng)格上的坐標(biāo)。得到全部邊線上的等值點(diǎn)后就需要使用一種追蹤策略,將孤立的等值點(diǎn)連接在一起形成等值線。一般先追蹤開曲線,即起止于網(wǎng)格邊界線上的等值線。追蹤開曲線可以順著四個(gè)邊界進(jìn)行,對于某個(gè)邊界任意選取一個(gè)等值點(diǎn)作為開始點(diǎn),追蹤下一個(gè)等值點(diǎn),直到追蹤到的下一個(gè)等值點(diǎn)也是邊界上的點(diǎn),就完成了一條等值線的追蹤。
要從一個(gè)等值點(diǎn)追蹤到下一個(gè)等值點(diǎn),這通常是利用上一次的追蹤方向來確定的。對于矩形網(wǎng)格來說追蹤方向有4種,即向下、向左、向上和向右。如果上一次等值點(diǎn)所在網(wǎng)格的列比本次等值點(diǎn)所在列小1,則追蹤方向向右。對于每一種追蹤方向可能出現(xiàn)的情況有兩種。這里以向右追蹤為例進(jìn)行說明,其余方向可以類推。向右追蹤時(shí),如果網(wǎng)格其他三個(gè)邊上僅有一邊存在等值點(diǎn),則選擇它作為下一個(gè)點(diǎn);如果其他三邊均存在等值點(diǎn)則從相鄰的上、下邊中選取,計(jì)算上一個(gè)等值點(diǎn)到上、下邊中待選等值點(diǎn)的距離,取距離小的作為下一個(gè)等值點(diǎn)。利用上面的" title="面的">面的追蹤方法追蹤等值線一般都符合實(shí)際情況,并且不會出現(xiàn)交叉現(xiàn)象。
當(dāng)追蹤出一個(gè)等值點(diǎn)后需要將它刪除,這樣追蹤完一條等值線后就不會重復(fù)追蹤該等值線上的點(diǎn)了。當(dāng)某一邊界已沒有等值點(diǎn)可以追蹤后,就完成了該邊界的開曲線追蹤,對于矩形網(wǎng)格需要在四個(gè)邊界上都進(jìn)行開曲線追蹤。開曲線追蹤完畢后,可能還存在一些等值點(diǎn),它們將構(gòu)成封閉的閉曲線,可以任取一點(diǎn)進(jìn)行追蹤,直至回到該點(diǎn)則完成追蹤。如果所有等值點(diǎn)都被追蹤過了,則關(guān)于該等值的等值線就全部追蹤完畢了。圖1是使用網(wǎng)格法追蹤生成的等值線圖。后面的填充算法將對它進(jìn)行快速填充。
利用追蹤算法得到的等值線,在網(wǎng)格比較稀疏的情況下顯得不夠平滑,往往還需要采用一種擬合方法對等值線進(jìn)行圓滑。一般可以使用三次參數(shù)樣條曲線或三次B樣條曲線[2]來擬合加密曲線,達(dá)到圓滑的效果。不過為了保證曲線通過原有等值點(diǎn),使用這兩種擬合方式時(shí)都需要求解線性方程組,速度比較慢,但是圓滑效果很好,因?yàn)槟軌虮WC二階連續(xù)。如果需要提高速度則可以采用HB曲線[5]。該方法不需要求解方程,可以保證一階連續(xù),對于大多數(shù)情況都可以取得滿意的效果,圖1中的等值線就使用了該方法進(jìn)行圓滑。
2 掃描線轉(zhuǎn)換算法
利用等值線追蹤算法已經(jīng)得到了全部的等值線,現(xiàn)在的問題是如何選擇一組色標(biāo)并充填整幅等值線圖。色標(biāo)中的顏色數(shù)應(yīng)等于等值線的級數(shù)。由于人眼對灰度等級分辨能力不高,通常只有十幾個(gè)等級,因此應(yīng)當(dāng)選擇多個(gè)鍵色內(nèi)插形成色標(biāo)。另外為了提高填充速度,應(yīng)當(dāng)將內(nèi)插形成的色標(biāo)顏色組存儲下來,以便按等級數(shù)提取相應(yīng)的填充顏色。
2.1 填充掃描線
選定填充色標(biāo)后,就需要用色標(biāo)中的顏色來填充等值線圖了。但在介紹掃描線轉(zhuǎn)換算法之前,先考慮一下如何填充一條掃描線。圖2表示了一條水平掃描線與等值線相交的拓?fù)潢P(guān)系。這里假設(shè)等值線從0開始,間隔為10米,[0,10)對應(yīng)顏色為c0,[30,40)對應(yīng)顏色為c3,以此類推。算法首先需要求出掃描線與所有等值線的交點(diǎn),并按照X坐標(biāo)的大小排序,接著根據(jù)等值線間的拓?fù)潢P(guān)系,確定相鄰兩個(gè)交點(diǎn)間應(yīng)該填充的顏色。觀察圖2可以發(fā)現(xiàn)相鄰交點(diǎn)有兩類情況:(1)前后交點(diǎn)的等高值不同,相差一個(gè)等級,如p0、p1交點(diǎn)對;(2)前后交點(diǎn)的等高值相同,如p3、p4交點(diǎn)對。

對于第(1)種情況,顏色的確定比較容易,如p0、p1交點(diǎn)對,因?yàn)榍昂蟮戎稻€的等值不同且必然相差一個(gè)等級,因此填充顏色應(yīng)當(dāng)取為[30,40)區(qū)段對應(yīng)的顏色c3。在實(shí)際計(jì)算中可以計(jì)算相鄰交點(diǎn)對應(yīng)等高值的平均值v,并令填充顏色為v對應(yīng)顏色。
第(2)種情況要復(fù)雜一些,因?yàn)榍昂髢蓚€(gè)交點(diǎn)不存在級差,因此無法直接判斷填充顏色,如p3、p4和p4、p5交點(diǎn)對。這時(shí)需要利用前一段填充的顏色來輔助判斷,例如填充p3、p4交點(diǎn)對時(shí),考慮到p2、p3交點(diǎn)對對應(yīng)的等高值為50、60,而當(dāng)前填充交點(diǎn)對對應(yīng)的等高值為60、60,說明當(dāng)前交點(diǎn)對對應(yīng)的顏色應(yīng)當(dāng)比上一段高一個(gè)色階,因而取為c6。這樣就可以利用前一段的色階推斷等高值相同的后一段對應(yīng)的填充顏色。在實(shí)際計(jì)算中,可以記下前一段的顏色等級g0,并且用當(dāng)前交點(diǎn)對中任意交點(diǎn)對應(yīng)的等高值計(jì)算出顏色等級g1。如果g0<g1,則令g0=g1,當(dāng)前顏色取為cg0,否則取g0=g0-1,取當(dāng)前顏色為cg0。
前面討論了第一次出現(xiàn)等高值相同交點(diǎn)對的情況,但是有時(shí)候等高值相同的交點(diǎn)對會連續(xù)出現(xiàn),例如p3、p4交點(diǎn)對后面的p4、p5交點(diǎn)對等高值也相同,這時(shí)是否可以繼續(xù)使用前面的算法呢?不妨用前面的算法試一下,p3、p4交點(diǎn)對使用填充色c6,即g0=6,p5對應(yīng)的顏色等級g1=6,按照前面的算法g0不小于g1,因此取g0=6-1=5,顏色取c5,恰巧正確。這是因?yàn)楦鶕?jù)等值線不會相交的特點(diǎn),如果連續(xù)出現(xiàn)等高值相同的交點(diǎn)對,那么交點(diǎn)對的顏色取值將會是交替變化的。利用前面的算法處理連續(xù)相同的交點(diǎn)對,也會得到交替變化的顏色,測試對于其他情況前面的算法也都是成立的。
2.2 掃描線轉(zhuǎn)換算法快速填充等值線圖
前面介紹了填充一條掃描線的方法,如果將一幅等值線圖的所有掃描線都按上面的算法填充,就可以得到填充后的等值線圖。不過填充的速度比較慢,因?yàn)槊織l掃描線都需要與全部等值線求交,并按交點(diǎn)水平坐標(biāo)大小排序,工作量很大,耗時(shí)較多。然而實(shí)際上一條掃描線僅僅會與一些等值線的某個(gè)邊相交,并且與上一條掃描線相交的邊一般也會與下一條掃描線相交,掃描線之間存在著相關(guān)性。因此可以借鑒圖形學(xué)中填充多邊形的掃描線轉(zhuǎn)換算法,充分利用這些相關(guān)性,提高填充速度。下面詳細(xì)介紹掃描線轉(zhuǎn)換算法所需要使用的數(shù)據(jù)結(jié)構(gòu)和算法流程。
為了有效利用掃描線的相關(guān)性,在掃描線轉(zhuǎn)換算法中需要建立如下數(shù)據(jù)結(jié)構(gòu):
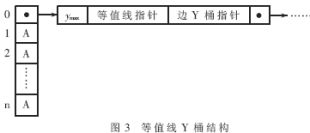
(1)等值線Y桶。等值線Y桶用于記錄等值線的基本信息,桶的長度與掃描線的條數(shù)一樣多,其編號與掃描線序號一致。每條等值線都要生成一個(gè)桶記錄項(xiàng),記錄該等值線的最大Y坐標(biāo)ymax、指向等值線的指針和指向該等值線邊Y桶的指針。桶記錄項(xiàng)按等值線的最小Y坐標(biāo)插入到桶中。圖3為等值線Y桶數(shù)據(jù)結(jié)構(gòu)的示意圖。
(2)有效等值線表AIT。該表存儲與當(dāng)前掃描線相交的所有等值線在等值線Y桶中的記錄指針。
(3)邊Y桶。每條等值線都由一系列的邊組成,為了利用相關(guān)性,需要建立等值線的邊Y桶,記錄每條邊的基本信息。等值線邊Y桶的長度等于與該等值線相交的掃描線的條數(shù)。對于等值線中的每條邊都要產(chǎn)生一個(gè)邊記錄,記錄該邊的最大Y坐標(biāo)ymax,Y值較小端對應(yīng)的X坐標(biāo)xmin,當(dāng)掃描線增大1時(shí)X坐標(biāo)的增量Δx,以及等值線的值value。每一個(gè)邊記錄按該邊的最小Y坐標(biāo)和整條等值線的最小Y坐標(biāo)的差值存入邊桶中,圖4為邊Y桶數(shù)據(jù)結(jié)構(gòu)的示意圖。

(4)有效邊表AET。該表存儲與當(dāng)前掃描線相交的所有等值線的邊在邊Y桶中的記錄指針。
利用上面的數(shù)據(jù)結(jié)構(gòu),一個(gè)完整的掃描線轉(zhuǎn)化填充算法如下:
(1)遍歷所有的等值線,為每一條等值線生成一個(gè)等值線Y桶中的記錄,并根據(jù)等值線的最小Y坐標(biāo)將該記錄加入到等值線Y桶中。
(2)將有效等值線表AIT和有效邊表AET初始化為空。
(3)對于每一條掃描線i,它從最小值開始,做以下工作。①檢查等值線Y桶對于掃描線i是否有新的等值線記錄,如果有則生成該掃描線對應(yīng)的邊Y桶,并在有效等值線表AIT中加入該掃描線的桶記錄。②遍歷AIT中的每一條等值線對應(yīng)的桶記錄,檢查該等值線對應(yīng)的邊Y桶對于掃描線i是否有新的邊記錄加入,如果有則將新的邊記錄按xmin字段的大小加入到有效邊表AET中。③利用有效邊表AET和掃描線填充算法填充該掃描線。④遍歷AET,檢查是否有邊記錄的ymax字段等于i,如果有則刪除該邊記錄,否則令該邊記錄的xmin=xmin+Δx。⑤遍歷AIT表,檢查是否有等值線記錄的ymax字段等于i,如果有則刪除該記錄。
利用上面的算法可以實(shí)現(xiàn)等值線的填充,由于使用了掃描線轉(zhuǎn)換算法,其算法復(fù)雜度與多邊形填充一致,因而速度優(yōu)勢很明顯。圖5和圖6是利用上面算法填充的等值線圖。其中圖5原始網(wǎng)格數(shù)據(jù)為10行×15列,圖幅450×300像素,色標(biāo)含35個(gè)色階,由4個(gè)鍵色插值生成,在主頻為1.4GHz的電腦上填充時(shí)間約為40ms。圖6原始網(wǎng)格數(shù)據(jù)為215行×330列,圖幅990×645像素,色標(biāo)含42個(gè)色階,由4個(gè)鍵色插值生成,在主頻為1.4GHz的電腦上填充時(shí)間約為120ms。從填充效果來看,填充結(jié)果與等值線一致,色階正確沒有出現(xiàn)任何誤填和漏填錯(cuò)誤。填充結(jié)果與其他填充算法結(jié)果一致。

本文介紹了等值線圖生成的一般方法,并在總結(jié)已有填充方法的基礎(chǔ)上,提出了基于掃描線轉(zhuǎn)換的等值線填充算法。該方法無需逐點(diǎn)插值填充,也無需追蹤等值區(qū)域、判斷包含關(guān)系,而是利用掃描線和等值線的拓?fù)潢P(guān)系確定填充顏色,并利用快速的掃描線轉(zhuǎn)換算法進(jìn)行填充,因而速度明顯由于其他填充方法。經(jīng)實(shí)踐證明該方法可以在毫秒級完成一般等值線圖的填充,而且填充效果與其他算法一致,因而具有很強(qiáng)的實(shí)用性。
參考文獻(xiàn)
1 吳自銀,高金耀.面向海底成圖基于DTM邊界的等值線填充算法.海洋學(xué)報(bào),2002;24(1):65~72
2 唐澤圣,周嘉玉,李新友.計(jì)算機(jī)圖形學(xué)基礎(chǔ).北京:清華大學(xué)出版社,1995:106~107
3 孫桂茹,馬 亮.等值線生成與圖形填充算法.天津大學(xué)學(xué)報(bào),2000;33(6):816~818
4 成建梅,陳崇希.三角網(wǎng)格等值線自動生成方法及程序?qū)崿F(xiàn).水利學(xué)報(bào),1998;22(10):32~36
5 王興波,李國喜.HB插值樣條曲線曲面.機(jī)械強(qiáng)度,1995;17(4):29~31