
摘 要: 介紹了未知電路板原理圖測繪系統(tǒng)的基本實現(xiàn)原理,并在此原理的基礎(chǔ)上,實現(xiàn)了柔性針床網(wǎng)絡(luò)圖測試系統(tǒng)。給出了該系統(tǒng)的設(shè)計方案,并詳細(xì)說明了該系統(tǒng)軟、硬件設(shè)計方法。實際應(yīng)用表明,該系統(tǒng)能實現(xiàn)未知電路板原理圖的測繪工作,具有較好的應(yīng)用前景。
關(guān)鍵詞: 電路原理圖" title="電路原理圖">電路原理圖 測繪 柔性針床 USB CPLD
近年來,我國引進了大量先進的儀器設(shè)備,這些設(shè)備系統(tǒng)龐大、結(jié)構(gòu)復(fù)雜、集成度高。經(jīng)過多年的使用,這些設(shè)備在維護修理、備件保障方面遇到了極大的困難。由于不是技術(shù)引進,幾乎沒有任何關(guān)于設(shè)備的技術(shù)資料,無法獲得電子備件的電路原理圖,所以對未知(無電路原理圖)電路板電路原理圖的測繪,對于電子備件尤其是軍工產(chǎn)品的反設(shè)計具有重要意義。
1 基本原理
要完成對未知電子備件的反設(shè)計,必須首先獲知該備件的連線表,然后才能依據(jù)元器件數(shù)據(jù)庫的相關(guān)知識繪制出原電路原理圖,進而通過技術(shù)分析和設(shè)計形成替代方案,實現(xiàn)反設(shè)計。對未知電路板的測繪所使用的常用辦法主要有如下兩種:
(1)用萬用表的歐姆檔,對印制電路板上的各外露焊點" title="焊點">焊點和元器件管腳進行連接測試,即首先測量第一個焊點(或管腳)和第二、第三個焊點(或管腳)之間的電阻,直至測量完所有焊點和管腳,從而得到第一個焊點或管腳在電路板上的連接圖。用同樣的方法,再測第二個焊點(或管腳)與第三、第四個焊點(或管腳)之間的電阻,直至測量完所有焊點和管腳,得到第二個焊點或管腳在電路板上的連接圖。依次類推,可以得到電路板上各焊點和元器件管腳的連接關(guān)系(即網(wǎng)絡(luò)圖)。這種方法雖然能夠得到電路板的網(wǎng)絡(luò)圖,但十分繁瑣、效率低、差錯率也高,因此應(yīng)開發(fā)自動測繪設(shè)備。
(2)采用固定針床的辦法進行測繪,對于每種電路板設(shè)計專門的測試針床,將專用針床與被測電路板的所有接點可靠接觸,在計算機測試軟件的控制下,通過專門的通道控制器可在較短時間內(nèi)完成測試工作,而且能完成對多層電路板的測繪。但這種方式要求為每種被測對象設(shè)計一個專門的針床和測試軟件,投入成本高、周期長。
綜合以上兩種方法的優(yōu)點,根據(jù)常用的通路電阻測試法,設(shè)計了“柔性針床網(wǎng)絡(luò)圖測繪系統(tǒng)”,實現(xiàn)了靈活高效的測繪。連線表測試完成后,借助專門建立的器件數(shù)據(jù)庫,通過人工干預(yù)的方式即可完成電路原理圖的繪制工作。
2 系統(tǒng)硬件設(shè)計
2.1 系統(tǒng)總體結(jié)構(gòu)
該系統(tǒng)由計算機、開關(guān)矩陣" title="開關(guān)矩陣">開關(guān)矩陣、柔性針床陣列和被測備件組成,其結(jié)構(gòu)見圖1。其中,柔性針床陣列通過柔性針與電路板上的所有節(jié)點可靠連接,開關(guān)矩陣實現(xiàn)通道的自動切換或順序切換,柔性針床寬度僅能夠覆蓋一個電子芯片,這樣通過多個針床,即可覆蓋整個待測電路板。
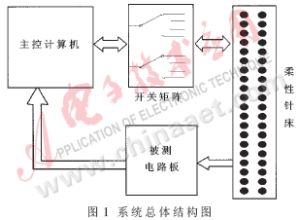
測試時將電路板水平固定,在電路板上方和下方間距為2至3厘米處水平固定柔性針床,柔性針床的一面有密集分布的焊點,這些焊點通過長短可變的彈性探針與被測電路板一面上的外露焊點或元器件管腳相連。柔性針床的另一面由連線將各焊點與開關(guān)矩陣相連,電路板的另一面也進行相同的操作,從而將電路板的外露焊點或元器件管腳引到柔性針床上,通過計算機對開關(guān)矩陣進行控制,實現(xiàn)柔性針床上各節(jié)點之間的連接關(guān)系的自動測試。
2.2 測試電路" title="測試電路">測試電路結(jié)構(gòu)組成
本系統(tǒng)采用自定義的總線結(jié)構(gòu),各柔性針床通過總線進行連接,由控制模塊" title="控制模塊">控制模塊控制相互間的通信。測試電路通過USB總線接口與主機進行連接,如圖2所示。
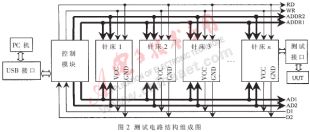
其中,ADDR1和ADDR2為針床地址總線,控制模塊通過發(fā)送相應(yīng)的地址碼實現(xiàn)針床的尋址。由于在測試時需要在針床本身和兩個針床之間進行測試,只設(shè)計一套地址總線不能同時尋址兩個針床,故設(shè)計了ADDR1和ADDR2兩套地址總線,可同時實現(xiàn)對兩個測試針床的尋址。
RD、WR為讀使能和寫使能總線,RD有效時,允許測試針床向控制模塊發(fā)送數(shù)據(jù),WR有效時,允許控制模塊發(fā)送指令到各個針床,實現(xiàn)控制功能。
AD1、AD2為針床探針地址總線。由于在測試時,各個探針都需要和其它探針進行遍歷測試,所以設(shè)計兩套地址總線用來同時尋址兩個不同的探針。AD1所尋址探針信號經(jīng)數(shù)據(jù)線D1引出,AD2所尋址探針信號經(jīng)數(shù)據(jù)線D2引出,通過測量D1與D2之間的電阻,就可以得到所對應(yīng)的電路板焊點之間的連接情況。
2.2.1 USB接口部分
在本設(shè)計中,PC機通過USB接口完成對測試機的控制,而測試數(shù)據(jù)又通過USB接口送回PC機進行分析,分析結(jié)果用于對UUT進行故障診斷。
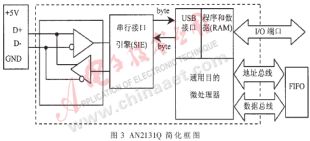
本系統(tǒng)采用Cypress公司的AN2131QC作為控制器芯片。圖3所示為AN2131QC的結(jié)構(gòu)簡化框圖,USB總線收發(fā)器與USB總線引腳D+、D-相連,串行接口引擎用來對串行數(shù)據(jù)進行解碼和譯碼、錯誤校驗、位填充,并完成其它USB總線所需的信號,最終實現(xiàn)與USB總線接口的數(shù)據(jù)傳輸。通用微處理器采用增強型8051,與標(biāo)準(zhǔn)8051相比較,執(zhí)行速度更快、功能更強大。在內(nèi)部使用RAM作為程序代碼和數(shù)據(jù)存儲器,因此8051序列具有“軟”特性,即:用戶可以自動裝載代碼和數(shù)據(jù)來實現(xiàn)具體功能。
2.2.2 控制模塊
控制模塊用來完成各個針床的尋址、控制、測試以及數(shù)據(jù)的發(fā)送與接收功能。通過USB接口由主機下達(dá)控制命令及接收數(shù)據(jù)。控制模塊結(jié)構(gòu)如圖4所示。
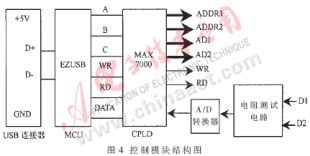
系統(tǒng)控制芯片采用ALTERA公司的MAX7000系列可編程邏輯器件(CPLD),用來接收主機發(fā)送的控制信號,對測試電路進行控制;接收測試數(shù)據(jù)并上傳到主機。當(dāng)WR有效時,接收控制指令;當(dāng)RD有效時,接收測試數(shù)據(jù)。在測試電路自定義總線上共有五種測試信號,所以采用三根控制信號線A、B、C,經(jīng)譯碼即可輸出不同的控制信號。電阻測試電路也位于控制模塊中,負(fù)責(zé)對經(jīng)D1和D2引出的電路板兩個焊點(或管腳)進行測試,測試結(jié)果經(jīng)A/D變換后由CPLD送到主機中。
2.2.3 測試針床
測試針床用來使用探針連接電路板各個焊點或管腳,并使用開關(guān)矩陣進行各個探針之間連接的自動順序切換,從而實現(xiàn)各個焊點之間的互連測試。針床電路如圖5所示。
開關(guān)矩陣采用MAX7000系列可編程邏輯器件實現(xiàn),用來連接針床上所有探針,接收控制信號并將所尋址探針信號輸出。
3 系統(tǒng)軟件設(shè)計
系統(tǒng)軟件運行于PC機平臺上,通過USB總線對測試電路進行控制并接收測試電路測試數(shù)據(jù),根據(jù)接收到的數(shù)據(jù)形成所測電路板電路連線表。現(xiàn)主要分析與電路測繪有關(guān)的測試電路控制程序:
(1)首先利用ADDR1尋址測試基準(zhǔn)針床,每個針床都有特定的地址碼,如發(fā)送ADDR1=00000001,表示選中1號測試針床,以此為基準(zhǔn)測試針床來對其它針床進行測試。
(2)1號測試針床利用AD1總線對其上所有探針進行尋址,AD1總線尋址該針床的基準(zhǔn)測試點,如發(fā)送AD1=00000001,表示尋址到1號探針,即1號探針連接D1端。
(3)以ADDR1所尋址針床為基準(zhǔn),利用ADDR2尋址所有針床,所尋址的針床利用AD2總線對其上探針進行尋址。
(4)以AD1總線所尋址探針為基準(zhǔn),對AD2總線所尋址探針進行遍歷測試。
程序偽代碼如下:
for( ADDR1=1 to 20) //假定共有20個測試針床,選定基準(zhǔn)測試針床
{
for( AD1 = 1 to 256) //假定每個針床上有256個探針和焊/點相連,選定基準(zhǔn)測試焊點
{
for( ADDR2 = 1 to 20) //依次尋址所有針床
{
for( AD2 = 1 to 256) //依次尋址測試針床上所有探針(焊點)
{
//測試電路測試函數(shù)
...
}
}
}
}
通過以上測試程序,即可實現(xiàn)每個探針(焊點)和其它所有探針(焊點)的遍歷測試,從而獲取電路板上每個焊點的連接情況。
通過電路板上元器件型號知識,利用此套測繪系統(tǒng)所測繪的電路板連線表,結(jié)合相應(yīng)PCB設(shè)計軟件及人工干預(yù),在某個引進裝備上實現(xiàn)了未知電路板的測繪工作,得到了其電路原理圖,為下一步的反設(shè)計工作奠定了基礎(chǔ)。由于涉及知識產(chǎn)權(quán)問題,該系統(tǒng)僅應(yīng)用于特殊領(lǐng)域電子設(shè)備。
?
參考文獻(xiàn)
1 顏榮江,余志強.EZ-USB2100系列單片機原理、編程及應(yīng)用[M]. 北京:北京航空航天大學(xué)出版社,2002
2 李國洪,沈明山. 可編程邏輯器件EDA技術(shù)與實踐[M]. 北京:機械工業(yè)出版社,2004
3 馮正勇,鄧云凱,郭振永.遠(yuǎn)程監(jiān)控系統(tǒng)中多業(yè)務(wù)數(shù)字光端機的設(shè)計與實現(xiàn)[J]. 測控技術(shù),2004;23(10)