
引言
GPS等衛(wèi)星導(dǎo)航定位技術(shù)廣泛應(yīng)用于各種領(lǐng)域。然而在室內(nèi)、地下等場合的定位需求卻有其局限性。近幾年來,隨著IEEE802.15.4商業(yè)標(biāo)準(zhǔn)的逐漸完善,無線傳感器網(wǎng)絡(luò)(WSN)的相關(guān)技術(shù)開始被廣泛討論和研究。隨著,TI公司提出帶硬件定位引擎的片上系統(tǒng)(SoC)解決方案CC2431。以及WSN用于無線定位技術(shù)被廣泛研究,該器件能滿足低功耗ZigBee/IEEE802.15.4無線傳感器網(wǎng)絡(luò)的應(yīng)用需要,CC2431的定位引擎基于接收信號強(qiáng)度指示RSSI(ReceivedSignalStrengthIndicator)技術(shù),相比于集中型定位系統(tǒng),RSSI功能降低網(wǎng)絡(luò)流量與通信延遲,在典型應(yīng)用中可實(shí)現(xiàn)3~5m的定位精度和0.25m的分辨率。這里基于RSSI定位技術(shù),詳細(xì)介紹CC2431無線定位系統(tǒng)的構(gòu)成、定位原理,并實(shí)現(xiàn)了基于CC2431無線定位系統(tǒng)的設(shè)計(jì)。
2CC2431簡介
CC2431以強(qiáng)大的IAR集成開發(fā)環(huán)境為支持,結(jié)合Zig-Bee協(xié)議棧、工具包和參考設(shè)計(jì),展示領(lǐng)先的ZigBee解決方案,其產(chǎn)品廣泛應(yīng)用于汽車、工控系統(tǒng)和無線傳感器網(wǎng)絡(luò)等領(lǐng)域,同時也適用于ZigBee之外的2.4GHz頻率的其他設(shè)備。CC2431的定位引擎基于RSSI技術(shù).根據(jù)接收信號強(qiáng)度與已知參考節(jié)點(diǎn)位置準(zhǔn)確計(jì)算出有關(guān)節(jié)點(diǎn)位置。然后將位置信息發(fā)送至接收端。
3基于CC2431定位原理及實(shí)現(xiàn)
3.1RSSI定位技術(shù)
RSSI是指節(jié)點(diǎn)接收到的無線信號強(qiáng)度大小。在基于RSSI的定位中,已知發(fā)射節(jié)點(diǎn)的發(fā)射信號強(qiáng)度,接收節(jié)點(diǎn)根據(jù)接收到信號的強(qiáng)度計(jì)算出信號的傳播損耗。利用理論和經(jīng)驗(yàn)?zāi)P蛯鬏敁p耗轉(zhuǎn)化為距離.并進(jìn)一步利用三角定位法確定待定位節(jié)點(diǎn)位置。該技術(shù)硬件要求較低、算法相對簡單,并且一些通信協(xié)議中已攜帶有RSSI的信息,這樣使得基于RSSI定位方法具有廣泛的應(yīng)用前景。該技術(shù)在實(shí)驗(yàn)室環(huán)境中表現(xiàn)出良好特性,但由于環(huán)境因素變化等原因.實(shí)際應(yīng)用中還需進(jìn)一步改進(jìn)。
3.2基于CC2431的定位系統(tǒng)
定位系統(tǒng)由參考節(jié)點(diǎn)和定位節(jié)點(diǎn)組成。參考節(jié)點(diǎn)是一個位于已知位置的靜態(tài)節(jié)點(diǎn),該節(jié)點(diǎn)確知自身的位置并可將其位置通過發(fā)送數(shù)據(jù)包通知其他參考節(jié)點(diǎn)(采用CC2430)。定位節(jié)點(diǎn)從參考節(jié)點(diǎn)處接收數(shù)據(jù)包信號,獲得參考節(jié)點(diǎn)位置坐標(biāo)及相應(yīng)的RSSI值并將其送入定位引擎,然后讀出由定位引擎計(jì)算得到的自身位置。
由參考節(jié)點(diǎn)發(fā)送給定位節(jié)點(diǎn)的數(shù)據(jù)包至少包含參考節(jié)點(diǎn)的坐標(biāo)參數(shù)水平位置X和垂直位置Y。而RSSI值可由接收節(jié)點(diǎn)計(jì)算獲得。圖1為具體定位系統(tǒng)原理框圖。
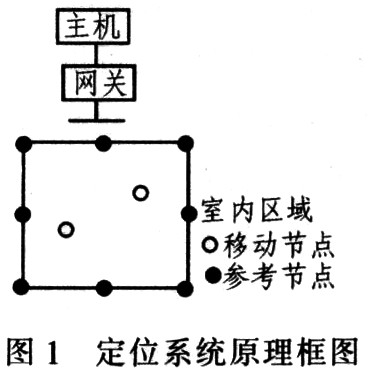
該定位系統(tǒng)原理框圖中各部分的作用如下:
(1)主機(jī)采用一臺普通的PC,主機(jī)連接網(wǎng)關(guān)實(shí)現(xiàn)對整個網(wǎng)絡(luò)的工作調(diào)度,編寫的定位軟件可實(shí)時觀察各個定位節(jié)點(diǎn)和參考節(jié)點(diǎn)的運(yùn)行情況。
(2)網(wǎng)關(guān)該網(wǎng)關(guān)用于組建一個ZigBeeWSN網(wǎng)絡(luò),并充當(dāng)協(xié)調(diào)器,把定位節(jié)點(diǎn)坐標(biāo)及外部環(huán)境參數(shù)傳送給主機(jī)。
(3)參考節(jié)點(diǎn)在網(wǎng)絡(luò)中充當(dāng)路由器的角色。而且在定位系統(tǒng)中,它由用戶指定固定坐標(biāo),并為定位節(jié)點(diǎn)提供該坐標(biāo)和RSSI平均值。參考節(jié)點(diǎn)(referencenode)是一種已知靜態(tài)節(jié)點(diǎn),其坐標(biāo)(x,y)是固定的,并且不參與定位計(jì)算,可由CC2430或CC2431器件實(shí)現(xiàn)。一個定位區(qū)域通常由8個參考節(jié)點(diǎn)組成。系統(tǒng)至少需要3~4個參考節(jié)點(diǎn)才能進(jìn)行定位。本文采用CC2430作為參考節(jié)點(diǎn)來實(shí)現(xiàn)。
(4)定位節(jié)點(diǎn)其內(nèi)部具有定位引擎,能夠根據(jù)參考節(jié)點(diǎn)提供的同定坐標(biāo)和RSSI平均值計(jì)算出自身的精確位置(坐標(biāo)),并把該坐標(biāo)協(xié)同定位節(jié)點(diǎn)標(biāo)識號發(fā)送給網(wǎng)關(guān)。本文中核心器件采用CC2431實(shí)現(xiàn)。
3.3定位工作流程
定位節(jié)點(diǎn)(blindnode)是一類可移動的節(jié)點(diǎn),可在參考節(jié)點(diǎn)包圍的區(qū)域內(nèi)任意移動。定位節(jié)點(diǎn)接收區(qū)域內(nèi)所有參考節(jié)點(diǎn)的RSSI值后,通過定位算法來計(jì)算其坐標(biāo)位置。定位節(jié)點(diǎn)南CC2431器件實(shí)現(xiàn)。采用該器件,可實(shí)現(xiàn)0.25m的定位分辨率和3m左右的定位精度,定位時間小于40μs。圖2是參考節(jié)點(diǎn)工作流程圖,圖3為定位節(jié)點(diǎn)工作流程圖。

4ZigBee定位系統(tǒng)實(shí)驗(yàn)結(jié)果及分析
實(shí)驗(yàn)區(qū)域描述:本實(shí)驗(yàn)在教學(xué)樓五樓實(shí)驗(yàn)室進(jìn)行:長×寬=8.13m×8.10m,在本次實(shí)驗(yàn)中使用6個參考節(jié)點(diǎn)和1個定位節(jié)點(diǎn),各參考節(jié)點(diǎn)坐標(biāo)設(shè)置如圖4所示。參考節(jié)點(diǎn)旁邊的數(shù)字為節(jié)點(diǎn)編號,6個參考節(jié)點(diǎn)(黑色的為參考節(jié)點(diǎn))坐標(biāo)依次為(單位為m):1(8.00,8.00),99(12.00,8.00),101(16.00,8.00),10(8.00,16.00),16(12.00,16.00),98(16.00,16.00)。

表l為本次實(shí)驗(yàn)所測的數(shù)據(jù),(x,y)為定位節(jié)點(diǎn)的實(shí)際所處位置的坐標(biāo),(x1,y1)為上位機(jī)GUI軟件所測的定位節(jié)點(diǎn)坐標(biāo)數(shù)據(jù)。一共測得21組數(shù)據(jù),如表1所示。
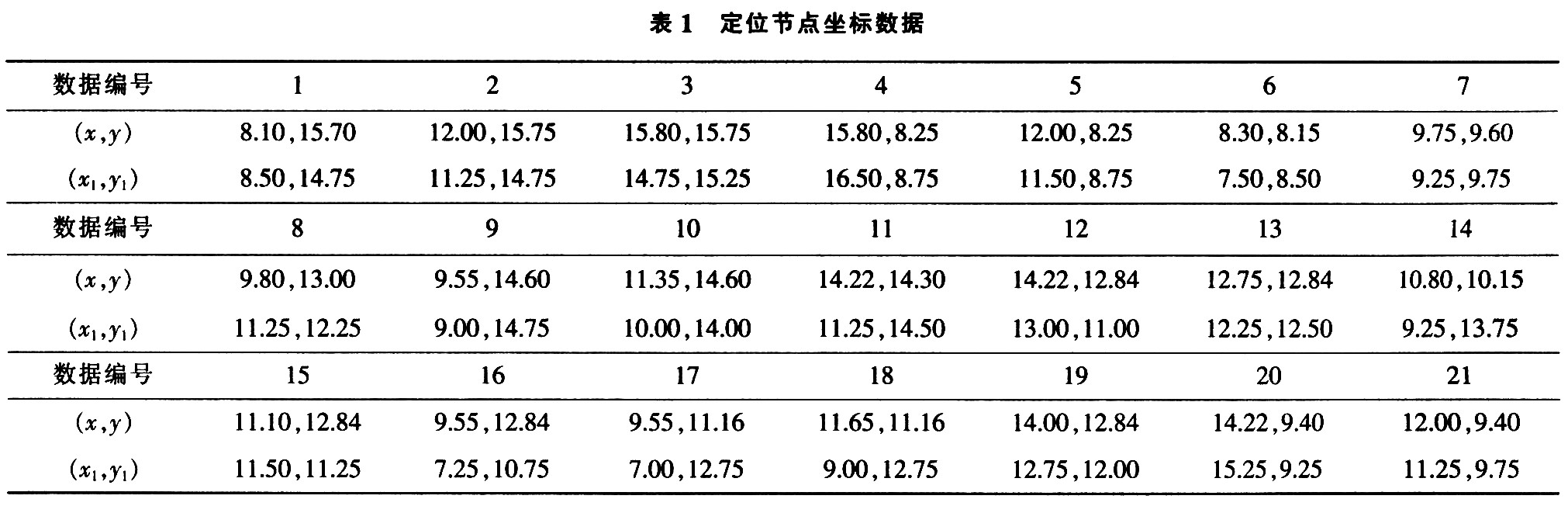
以上所測得的數(shù)據(jù)除個別誤差較大外,如第11,14,16,17組數(shù)據(jù);其他的都比較接近節(jié)點(diǎn)的真實(shí)位置。誤差的來源較多,比如定位節(jié)點(diǎn)靠近墻壁時誤差會比較大,定位節(jié)點(diǎn)天線的朝向?qū)φ`差的大小也有較大影響。
圖5是根據(jù)相關(guān)通信協(xié)議編寫的上位機(jī)無線定位軟件ZWS_lum的界面,黑色的點(diǎn)代表參考節(jié)點(diǎn),白色的點(diǎn)代表定位節(jié)點(diǎn)。當(dāng)定位節(jié)點(diǎn)靠近或遠(yuǎn)離參考節(jié)點(diǎn)時,在程序中可以清楚的看到相應(yīng)的定位效果。
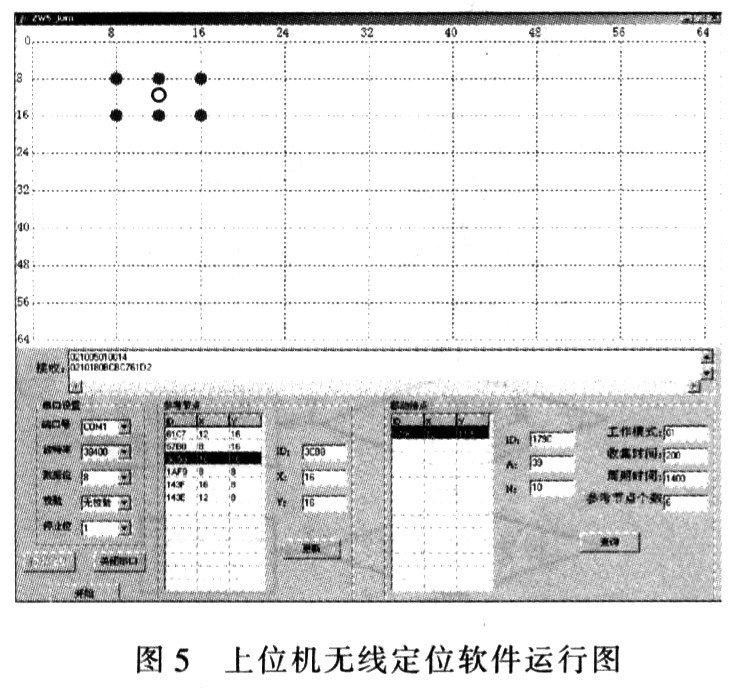
該軟件不僅可以顯示實(shí)際的組網(wǎng)信息,而且還可以:對于參考節(jié)點(diǎn),顯示其X、Y坐標(biāo),并可以修改在平面區(qū)域的X、Y坐標(biāo),然后刷新到該拓?fù)鋱D上,這樣可以根據(jù)實(shí)際定位區(qū)域的需要來布置參考節(jié)點(diǎn);對于定位節(jié)點(diǎn),可以顯示其在平面區(qū)域的實(shí)時位置信息,表1中的坐標(biāo)(x1,y1)信息就是通過該軟件獲取得到的。該信息每隔5s更新一次,另外還可以通過該界面查看定位節(jié)點(diǎn)配置參數(shù)信息。
5結(jié)束語
CC2430/2431是一款針對無線傳感器網(wǎng)絡(luò)ZigBee/IEEE802.15.4的片上系統(tǒng)(SoC)解決方案,其硬件定位引擎具有硬件設(shè)備要求低、定位精度高的特點(diǎn),很好地滿足了市場需求。采用該方式組網(wǎng)建立室內(nèi)定位系統(tǒng)可達(dá)到1~2m之內(nèi)的定位精度。通過合理布設(shè)參考節(jié)點(diǎn),該系統(tǒng)可應(yīng)用在樓內(nèi)、地下、隧道等場,所實(shí)現(xiàn)高精度室內(nèi)定位,因此,可以預(yù)見,基于ZigBee的無線定位技術(shù)在未來將會有很好的發(fā)展及應(yīng)用。