
引 言
整流器作為一種AC/DC變換裝置,其發(fā)展經(jīng)歷了由不可控整流器(二極管整流)、相控整流器(晶閘管整流)到PWM整流器(門極可關(guān)斷功率開關(guān)管)的發(fā)展歷程。晶閘管相控整流和二極管不可控整流對電網(wǎng)諧波污染嚴(yán)重,且網(wǎng)側(cè)功率因數(shù)低。PWM整流器已對傳統(tǒng)的相控及二極管整流器進(jìn)行了全面的改進(jìn)。TMS320LF2407具有快速的數(shù)據(jù)處理能力和豐富的硬件資源,作為控制芯片可以提高系統(tǒng)的實(shí)時(shí)響應(yīng)能力和控制精度,已經(jīng)被廣泛應(yīng)用于電氣自動(dòng)化控制的各個(gè)領(lǐng)域。
1 總體設(shè)計(jì)及硬件電路
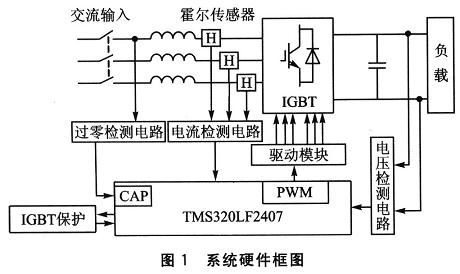
圖1為PWM整流器系統(tǒng)硬件框圖。在這個(gè)系統(tǒng)中,TMS320LF2407為數(shù)字控制芯片,整流器采用SVPWM控制策略。系統(tǒng)硬件由主電路、直流電壓檢測電路、交流側(cè)輸入電流檢測電路、過零檢測電路和保護(hù)電路等組成。DSP采集直流電壓檢測電路檢測的電壓值和交流電流檢測電路檢測的電流值,通過SVPWM控制算法,產(chǎn)生6路PWM脈沖通過驅(qū)動(dòng)模塊去控制整流橋功率管的導(dǎo)通和關(guān)斷。當(dāng)發(fā)生故障時(shí),DSP封鎖PWM輸出。
1.1 主電路
圖2為三相PWM整流橋主電路,包括交流側(cè)的電感、電阻、直流輸出電容,以及由全控開關(guān)器件和續(xù)流二極管組成的三相半橋電路。ua、ub、uc為電源電壓,L為交流側(cè)濾波電感,主要作用為隔離電網(wǎng)電動(dòng)勢與交流側(cè)電壓,濾除交流側(cè)PWM諧波電流,實(shí)現(xiàn)PWM整流器交流側(cè)正弦波電流控制。
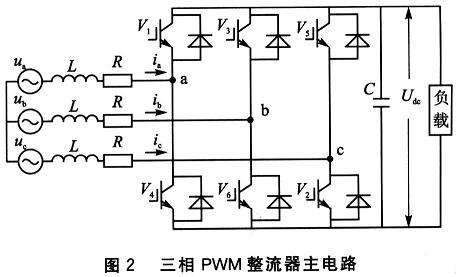
電阻R為濾波電感L的等效電阻和功率開關(guān)管損耗等效電阻的合并,C為直流側(cè)支撐電容,其主要作用為緩沖三相電壓型PWM整流器交流側(cè)與直流負(fù)載間的能量交換,且穩(wěn)定VSR直流側(cè)電壓,抑制直流側(cè)諧波電壓。
1.2 過零檢測電路
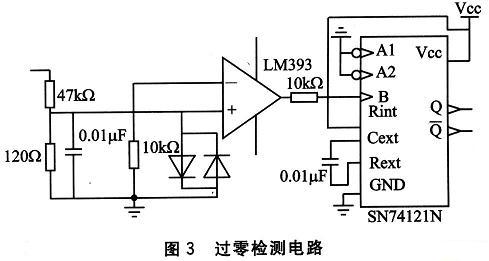
過零檢測電路如圖3所示。過零觸發(fā)電路的作用是根據(jù)相電壓的過零點(diǎn)來鑒別系統(tǒng)所處的區(qū)間,通過過零觸發(fā)脈沖使系統(tǒng)軟件產(chǎn)生中斷來調(diào)用相應(yīng)的控制脈沖計(jì)算程序。電壓經(jīng)過電阻分壓和濾波,通過LM393構(gòu)成的過零比較電路得到與電網(wǎng)輸入相電壓信號同步的方波信號,經(jīng)過SN74121N變成和方波同步的觸發(fā)脈沖,隨后被送到DSP控制芯片的捕獲接口,用來產(chǎn)生邊沿捕獲信號以觸發(fā)相應(yīng)的中斷,從而調(diào)用相應(yīng)的中斷服務(wù)子程序。
2 軟件設(shè)計(jì)
空間矢量PWM(SVPWM)控制策略是依據(jù)變流器空間電壓(電流)矢量切換來控制變流器的一種思路新穎的控制策略。SVPWM具有電壓利用率高、動(dòng)態(tài)響應(yīng)快等優(yōu)點(diǎn),另外,簡單的矢量模式切換更易于單片微處理器實(shí)現(xiàn)。根據(jù)空間矢量的控制原理,三相對稱的整流器開關(guān)輸入電壓可視作一個(gè)空間電壓矢量V來處理,利用整流器8個(gè)基本電壓空間矢量V0~V7的不同組合合成幅值相同、相位不同的空間電壓矢量V。區(qū)間劃分與基本電壓空間矢量之間的關(guān)系如圖4所示。
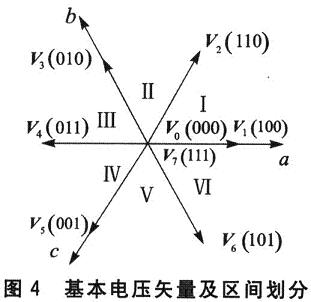
假設(shè)電壓空間矢量V在I區(qū)間,那么需要基本電壓矢量V1、V2、V0/7共同作用來合成。依據(jù)平行四邊形法則,有

T1、T2分別為矢量V1、V2在一個(gè)開關(guān)周期中的持續(xù)時(shí)間;Ts為PWM開關(guān)周期。令零矢量V0/7的持續(xù)時(shí)間為T0/7,則
![]()
令V與V1間的夾角為θ,又因|V1|=|V2|=2Udc/3,可得
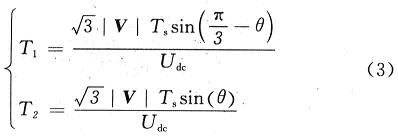
其中Udc為輸出直流電壓。
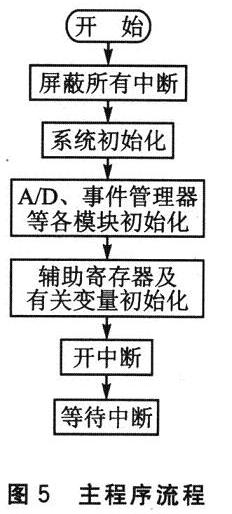
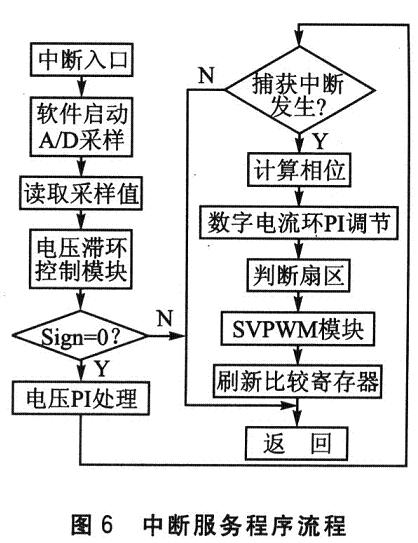
本系統(tǒng)軟件設(shè)計(jì)包括主程序、中斷服務(wù)子程序、電壓滯環(huán)模塊、電壓外環(huán)PI調(diào)節(jié)模塊、數(shù)字電流環(huán)PI調(diào)節(jié)模塊、扇區(qū)判斷子程序和SVPWM產(chǎn)生子程序等。圖5為主程序流程,圖6為中斷服務(wù)程序流程。主程序主要完成DSP控制器的系統(tǒng)初始化,模數(shù)轉(zhuǎn)換模塊、事件管理器模塊等相關(guān)控制寄存器的初始化,系統(tǒng)中控制用的狀態(tài)變量的初始化。在中斷程序中,通過調(diào)用一些子程序模塊,完成相應(yīng)的控制算法,輸出PWM控制脈沖等。
3 實(shí)驗(yàn)結(jié)果
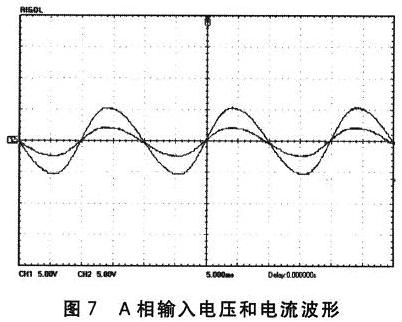
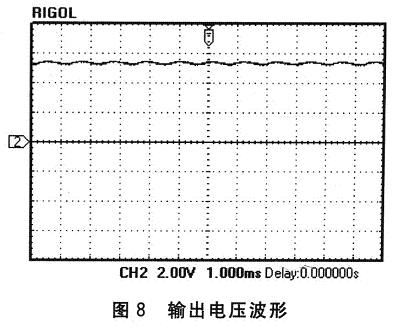
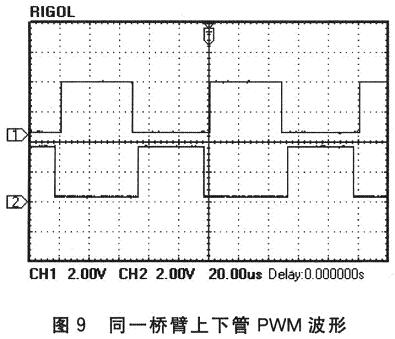
搭建了11KVA整流實(shí)驗(yàn)樣機(jī)硬件平臺,輸入三相電壓有效值為220 V,頻率為50Hz。圖7為A相輸入電壓和電流波形,可以看出輸入電流波形呈正弦化,電源電壓和輸入交流電流同相位,基本實(shí)現(xiàn)了單位功率因數(shù)整流。圖8為輸出直流電壓波形,可以看出輸出直流電壓比較平滑,脈動(dòng)小,基本穩(wěn)定在620 V。圖9為同一橋臂上下功率管PWM波形,為了防止上下管同時(shí)導(dǎo)通,設(shè)置了5μs的死區(qū)。
結(jié) 語
本系統(tǒng)采用了TMS320LF2407DSP控制芯片,簡化了系統(tǒng)的硬件結(jié)構(gòu),提高了系統(tǒng)的實(shí)時(shí)性和可靠性。三相PWM整流器采用SVPWM控制,提高了電壓的利用率。簡單的空間矢量切換模式更易于單片微處理器實(shí)現(xiàn),可以使網(wǎng)側(cè)電流正弦化,基本實(shí)現(xiàn)單位功率因數(shù)整流。本系統(tǒng)對實(shí)際工程應(yīng)用有一定的指導(dǎo)意義。