
摘? 要: 根據(jù)語音錄放芯片ISD4004的接口特點,設(shè)計了其與TMS320VC5402 DSP的SPI接口電路。完成了DSP對ISD芯片的通訊與接口控制編程,并給出了實際應(yīng)用中的一種ISD4004信息管理" title="信息管理">信息管理方法:信息地址表(MAT)。
關(guān)鍵詞: DSP? 語音錄放芯片? ISD4004? SPI接口? MAT
?
許多類型的語音錄放應(yīng)用要求具備信息管理的功能,即能夠隨意地錄、放、刪除任意一段信息。而許多語音錄放系統(tǒng)并不能很好地滿足這種要求,如磁帶錄音系統(tǒng)。ISD4004語音錄放芯片提供了SPI微控制器" title="微控制器">微控制器接口,使得語音錄放的信息管理成為可能。本文將詳細(xì)闡述TMS320VC5402 DSP與ISD4004的SPI接口設(shè)計" title="接口設(shè)計">接口設(shè)計及其控制操作,同時設(shè)計適合應(yīng)用的信息管理方法。
ISD4004語音錄放芯片工作電壓為3V,單片錄放時間為8~16分鐘。芯片設(shè)計使得所有操作必須由微控制器控制,操作命令可通過串行通信接口SPI送入。芯片采用多電平直接模擬量存儲技術(shù),每個采樣值直接存儲在片內(nèi)閃爍存儲器中,因此能夠非常真實、自然地再現(xiàn)語音、音樂、音調(diào)和效果聲。采樣頻率可為4.0k、5.3k、6.4k、8.0kHz,頻率越低,錄放時間越長,但音質(zhì)有所下降。
TMS320VC5402是美國TI(德州儀器)公司推出的一款高性能的定點DSP,最高頻率為100MHz,內(nèi)部提供16K的存儲空間。它提供的多信道緩沖串口" title="串口">串口(McBSP)可以設(shè)置為SPI工作方式,從而使得DSP與ISD4004的接口設(shè)計成為可能。
1 接口設(shè)計
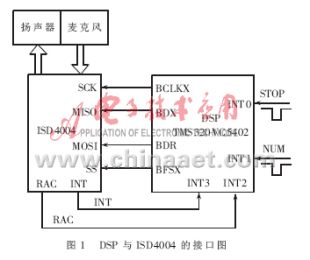
DSP作為SPI(串行外設(shè)接口)的主器件(Master),負(fù)責(zé)為ISD4004提供串行時鐘、片選信號以及控制ISD4004的動作信號。接口電路如圖1所示。
?
1.1 SPI
SPI協(xié)議是一個同步串行數(shù)據(jù)傳輸協(xié)議,協(xié)議假定微控制器的SPI移位寄存器在SCLK的下降沿動作。ISD4004工作于SPI工作模式。因此對于ISD4004而言,在時鐘上升沿" title="上升沿">上升沿鎖存MOSI引腳的數(shù)據(jù),在下降沿將數(shù)據(jù)送至MISO引腳。ISD4004與DSP通訊協(xié)議的具體內(nèi)容如下:
(1)所有串行數(shù)據(jù)傳輸開始于SS下降沿。
(2)SS在數(shù)據(jù)傳輸期間必須保持低電平,在兩條指令之間則保持高電平。
(3)數(shù)據(jù)在時鐘上升沿移入,在下降沿移出。
(4)SS變低時,輸入指令和地址后,ISD才能開始錄放操作。
(5)指令格式是8位控制碼加16位地址碼。
(6)ISD的任何操作(含快進(jìn))如果遇到EOM(信息結(jié)束標(biāo)志)或OVF(溢出),則產(chǎn)生一個中斷,該中斷狀態(tài)在下一個SPI周期開始時被清除。
(7)使用“讀”指令使中斷狀態(tài)位移出ISD的MISO引腳時,控制及地址數(shù)據(jù)也應(yīng)同步從MOSI端移入。因此要注意移入的數(shù)據(jù)是否與器件當(dāng)前進(jìn)行的操作兼容。
(8)所有操作在運行位(RUN)置“1”時開始,置“0”時結(jié)束。
(9)所有指令都在SS上升沿開始執(zhí)行。
1.2 ISD4004與DSP的SPI時序配合
根據(jù)ISD4004的時序要求,DSP設(shè)置串口為SPI工作模式,發(fā)送數(shù)據(jù)先于串行時鐘半個周期建立、數(shù)據(jù)在時鐘上升沿發(fā)送。由圖2可知,ISD接收命令字的方式是先地址后命令,且位序從低到高;而DSP發(fā)送數(shù)據(jù)方式是先高位后低位,故在DSP發(fā)送程序中須將待發(fā)送地址和命令進(jìn)行高低位對調(diào)。
?

?
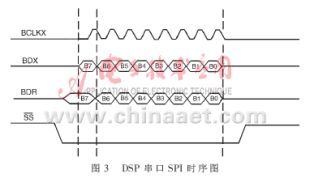
串行時鐘(SCLK)由DSP主時鐘產(chǎn)生。在DSP運行于10MHz時,設(shè)置時鐘分頻因子為255,得到約40kHz的串行傳輸時鐘,以適應(yīng)ISD4004相對慢速的要求。DSP串口SPI方式數(shù)據(jù)傳輸時序如圖3所示。
?
?
ISD4004的RAC管腳(行地址時鐘)用于指示錄放操作已經(jīng)接近一行的末尾。RAC在行末前25ms變低,在到達(dá)行末時變高,DSP將它作為中斷INT3的中斷源,指示錄放操作進(jìn)行到何處;INT管腳在遇到EOM標(biāo)志和OVF溢出時向DSP發(fā)中斷,DSP將它作為中斷INT2的中斷源,用來指示是否到達(dá)一段信息的末尾。按下NUM鍵觸發(fā)INT1中斷開始錄音,按下STOP鍵觸發(fā)INT0中斷終止錄音。放音時按下NUM即開始,遇到語句EOM時自動停止放音。
1.3 接口軟件設(shè)計
DSP對ISD的控制是通過SPI接口實現(xiàn)的,因此DSP的McBSP必須設(shè)置為符合ISD控制命令時序要求的SPI工作模式。以下程序段完成了McBSP的SPI模式設(shè)置(單幀數(shù)據(jù)為24bit,串行時鐘上升沿發(fā)送數(shù)據(jù),時鐘頻率為40kHz):
stm SPCR1, McBSP1_SPSA
stm #0000h, McBSP1_SPSD????????????????? ;Reset接收
stm SPCR2, McBSP1_SPSA
stm #0000h, McBSP1_SPSD????????????????? ;Reset發(fā)送
stm SPCR1, McBSP1_SPSA
stm #1800h, McBSP1_SPSD????????????????? ;CLKSTP=11,數(shù)據(jù)提前半個周期
stm RCR1, McBSP1_SPSA
stm #0080h, McBSP1_SPSD????????????????? ;RWDLEN1=100,每幀數(shù)據(jù)24bit
stm RCR2, McBSP1_SPSA
stm #0001h, McBSP1_SPSD????????????????? ;RDATDLY=01
stm XCR1, McBSP1_SPSA
stm #0080h, McBSP1_SPSD????????????????? ;XWDLEN1=100,發(fā)送數(shù)據(jù)每幀24bit
stm XCR2, McBSP1_SPSA
stm #0001h, McBSP1_SPSD
stm SRGR1, McBSP1_SPSA
stm #00ffh, McBSP1_SPSD??????????????????;CLKGDV=0xFF,SPI的時鐘=DSP時鐘/256
stm SRGR2, McBSP1_SPSA
stm #2000h, McBSP1_SPSD
stm PCR, McBSP1_SPSA
stm #0a08h, McBSP1_SPSD??????????????????;CLKXP=0,CLKXM=1, FSXM=1,FSXP=1
stm SPCR2,McBSP1_SPSA
stm #0040h, McBSP1_SPSD????????????????? ;GRST=1
nop
nop?????????????????????????????????????? ;等待兩個周期
stm SPCR1, McBSP1_SPSA????
stm #1801h, McBSP1_SPSD????????????????? ;設(shè)定RRST=1,開始接收數(shù)據(jù)?
stm SPCR2, McBSP1_SPSA????
stm #0041h, McBSP1_SPSD????????????????? ;設(shè)定XRST=1,開始發(fā)送數(shù)據(jù)
??? DSP中斷服務(wù)程序、命令字發(fā)送程序以及信息管理程序在此不贅述。
2 信息管理
在采用本模塊的擬人機(jī)器人語音交互系統(tǒng)中,若干條語音按順序分別被錄入到芯片,并將其編號為1、2、3等。DSP可以通過SPI接口獲得每次錄音結(jié)束時的ISD內(nèi)部信息指針,據(jù)此構(gòu)建一個信息地址表(MAT),并將此表存入Flash Memory中,作為以后錄放、刪除操作時信息管理的依據(jù)。
ISD4004內(nèi)部存儲器分為2400行,每行1600列。對器件尋址即選擇一行,從行首開始錄放,而每行中的列不可尋址。對于8kHz采樣率的ISD4004,采樣間隔為125μs。器件地址分辨率可按如下計算:
????
2.1 MAT
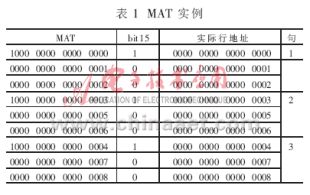
由于ISD4004內(nèi)部可尋址多達(dá)2400行,而每行固定存儲200ms語音,為了可錄放、刪除任意長度的語音,有必要建立MAT。MAT跟蹤每一條語音的開始地址以及每一個信息碎塊的開始和結(jié)束地址。ISD4004共2400行,實際只需要12位地址即可完全尋址。為節(jié)省MAT存儲空間,將地址最高位bit15作為語音起始點標(biāo)志。建立MAT的規(guī)則如下:
(1)MAT表項值全為0(0000 0000 0000 0000):表示對應(yīng)行未存儲任何語音;
(2)MAT表項值的bit15為1(1XXX XXXX XXXX XXXX),表示對應(yīng)的行是某句語音的起始行;
(3)MAT表項值的bit15為0,其余各位是有效地址(0XXX XXXX XXXX XXXX),表示對應(yīng)的行是某句語音的一行,但不是起始行;
(4)ISD的第一行總是某句語音的起始行。
同一句語音的地址在MAT中總是連續(xù)存放的。由若干行組成的一句語音,它的各行地址總是從小到大,但不一定兩兩相連。以行地址為表項的MAT,所要求的存儲空間是較大的。本例中為2400行語句,則要求MAT具有2400個表項。為了減小MAT大小,也可對語音進(jìn)行分塊。若以8行為一個語音塊,則MAT大小減小為300個表項。經(jīng)過幾次錄音和刪除后,建立的MAT如表1所示。
?
?
2.2 信息管理操作
放音時,DSP從MAT表頭開始搜索bit15為1的表項。要播放第幾條語句,則尋找第幾個bit15為1的表項。由于RAC的周期和器件的行相同,且其低脈沖時間長達(dá)25ms,在播放當(dāng)前行語音的同時,RAC觸發(fā)DSP的INT3中斷。INT3中斷服務(wù)程序驗證下一行bit15是否為1,若不為1則將該行地址送入ISD,剛輸入的地址不會立刻生效,而是在緩沖器中等待當(dāng)前行結(jié)束;若為1則指示下一行為新語句開始地址,DSP不送任何指令。放音遇到EOM或者OVF時產(chǎn)生INT中斷,停止放音。
錄音時,按NUM鍵啟動錄音操作,DSP首先找出MAT中的一個全0行,發(fā)錄音指令;在錄制當(dāng)前行的同時,DSP等待RAC信號觸發(fā)INT3中斷,中斷服務(wù)程序繼續(xù)尋找全0行、發(fā)帶該行地址的錄音指令,直到按STOP鍵觸發(fā)INT0中斷發(fā)錄音停止命令為止。刪除語音可通過將相應(yīng)語音行全置零來完成。
本文詳細(xì)闡述了TMS320VC5402 DSP與ISD4004語音錄放芯片的SPI接口設(shè)計、ISD4004的語音信息管理以及DSP與ISD4004之間的通訊與控制程序算法的設(shè)計。該模塊作為擬人機(jī)器人語音交互系統(tǒng)的語音應(yīng)答模塊,可以對機(jī)器人識別的命令語句進(jìn)行相應(yīng)的實時應(yīng)答。
?
參考文獻(xiàn)
1 TMS320C54X DSP Reference Set, Volume 5: Enhanced?Peripherals. Texas Instruments,1999
2 TMS320C54X DSP Reference Set, Volume 2: Mnemonic?instruction set. Texas Instruments,1999
3 李 剛. 數(shù)字信號處理器的原理及其開發(fā)應(yīng)用.天津:天津大學(xué)出版社,2000
4 ISD4004 Series Voice Recording & Playback IC Datasheet. ISD/Winbond Electronics Corp., 2000