
H型雙極模式PWM控制提高轉(zhuǎn)臺伺服系統(tǒng)低速特性的作用十分顯著,而且簡單易行。H型雙極模式PWM控制能夠提高伺服系統(tǒng)的低速特性,是因為H型雙極模式PWM控制的電動機電樞回路中始終流過一個交變的電流,這個電流可以使電動機發(fā)生高頻顫動,有利于減小靜摩擦,從而改善伺服系統(tǒng)的低速特性。但因其功率損耗大,H型雙極模式PWM控制只適用于中、小功率的伺服系統(tǒng)。因此,有必要設(shè)計一種能夠減小功率損耗的H型雙極模式PWM控制的功率轉(zhuǎn)換電路,使得H型雙極模式PWM控制應(yīng)用在大功率伺服系統(tǒng)中。
H型雙極模式PWM控制的功率損耗
如圖1所示,H型雙極模式PWM控制一般由4個大功率可控開關(guān)管(V 1-4)和4個續(xù)流二極管(VD 1-4)組成H橋式電路。4個大功率可控開關(guān)管分為2組,V1和V4為一組,V2和V3為一組。同一組的兩個大功率可控開關(guān)管同時導通,同時關(guān)閉,兩組交替輪流導通和關(guān)閉,即驅(qū)動信號u1=u4,u2=u3=-u1,電樞電流的方向在一個調(diào)寬波周期中依次按圖1中方向1、2、3、4變化。由于允許電流反向,所以H型雙極模式PWM控制工作時電樞電流始終是連續(xù)的。電樞電流始終連續(xù)產(chǎn)生電動機的附加功耗、大功率可控開關(guān)管高頻開通關(guān)閉產(chǎn)生的導通功耗和開關(guān)功耗等動態(tài)功耗,是H型雙極模式PWM控制功率損耗的主要來源。決定電動機附加功耗大小的因素主要是PWM的開關(guān)頻率,開關(guān)頻率越大附加功耗就越小。決定大功率可控開關(guān)管的動態(tài)功耗大小的因素主要是大功率可控開關(guān)管的開通關(guān)閉時間和PWM的開關(guān)頻率,開通關(guān)閉時間越長動態(tài)功耗就越大,PWM開關(guān)頻率越大動態(tài)功耗就越大。
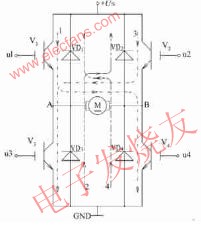
圖1H型雙極模式PWM控制原理圖
電樞回路的附加功耗、大功率可控開關(guān)管的動態(tài)損耗,使得H型雙極模式PWM控制的功率損耗很大、不適合應(yīng)用在大功率伺服系統(tǒng)中。為了解決這個問題,本文將以減小電動機電樞回路的附加功耗和大功率開關(guān)管的動態(tài)功耗為原則,設(shè)計H型雙極模式PWM控制的功率轉(zhuǎn)換電路,以使H型雙極模式PWM控制應(yīng)用在大功率伺服系統(tǒng)中。
H型雙極模式PWM控制的功率轉(zhuǎn)換電路設(shè)計
設(shè)計H型雙極模式PWM控制的功率轉(zhuǎn)換電路的核心是:功率轉(zhuǎn)換器件的選取及其驅(qū)動電路設(shè)計、保護電路的設(shè)計。
功率轉(zhuǎn)換器件
常用的大功率可控開關(guān)管主要有大功率雙極型晶體管(GTR)、大功率電力場效應(yīng)管(MOSFET)和IGBT等。GTR的主要缺點是:開通關(guān)閉時間長、開關(guān)功耗大、工作頻率低、熱穩(wěn)定性差、容易損壞。MOSFET的主要缺點是:管子導通時通態(tài)壓降比較大、管子功率損耗大。絕緣柵雙極晶體管IGBT(Isolated Gate Bipolar Transistor)集GTR和MOSFET的優(yōu)點于一身,既具有通態(tài)電壓低、耐高壓、承受電流大、功率損耗低的特點,又具有輸出阻抗高、速度快、熱穩(wěn)定性好的特點。因此,IGBT具有廣闊的工程應(yīng)用前景。
本文的功率轉(zhuǎn)換電路采用2MB1300D-140型號的IGBT作為功率轉(zhuǎn)換器件,其示意圖如圖2中右側(cè)所示,G是柵(門)極、C極是集電極、E極是發(fā)射極。IGBT驅(qū)動條件與IGBT特性的關(guān)系經(jīng)實驗測得如表1所示,其中Vces、ton、toff、Vce、R分別為集電極-發(fā)射極飽和壓降、開通時間、關(guān)閉時間、集電極-發(fā)射極電壓和柵極電阻,↑、-、↓分別表示增大、不變、減小。從表1可以看出:
①增大正向柵壓+Vge,Vces和ton隨之減小,IGBT的動態(tài)功耗隨之減小;
②增大反向柵壓-Vge,toff隨之減小,IGBT的動態(tài)功耗隨之減小;
③增大R,IGBT的ton、toff隨之增大,IGBT的動態(tài)功耗隨之增大。
表1IGBT驅(qū)動條件與IGBT特性的關(guān)系

因此,減小IGBT的動態(tài)功耗,需要增大正向柵壓+Vge、增大反向柵壓-Vge、減小ton和toff。但Vge并非越高越好,原因是Vge過高時電流增大,容易損壞IGBT。一般+Vge不超過+20V。IGBT關(guān)斷期間,由于電路中其它部分的干擾,會在柵極G上產(chǎn)生一些高頻振蕩信號,這些信號輕則會使本該關(guān)閉的IGBT處于微通狀態(tài)、增加IGBT的功耗,重則會使逆變電路處于短路直通狀態(tài),為了防止這些現(xiàn)象發(fā)生反向柵壓-Vge越大越好。根據(jù)上述關(guān)系可以總結(jié),IGBT對驅(qū)動電路的要求主要有:動態(tài)驅(qū)動能力強、正向和反向柵壓合適、輸入輸出電隔離能力強、輸入輸出信號傳輸無延時、具有一定保護功能。
為了減小IGBT的動態(tài)功耗和保障電路安全,滿足IGBT的驅(qū)動要求,需合理確定+Vge、-Vge和R的值。這些都需要通過設(shè)計驅(qū)動電路來實現(xiàn)。
驅(qū)動電路設(shè)計
設(shè)計性能良好的驅(qū)動電路,可以使IGBT工作在比較理想的開關(guān)狀態(tài)、縮短開關(guān)時間、減小開關(guān)功耗、提高功率轉(zhuǎn)換電路的運行效率。IGBT柵極驅(qū)動方式主要有變壓器驅(qū)動法、直接驅(qū)動法和光耦隔離驅(qū)動法。變壓器驅(qū)動法有利于驅(qū)動信號的隔離、驅(qū)動功率損耗很小,但限制了使用頻率,不利于PWM信號的傳輸。直接驅(qū)動法適用于小容量的不加保護的IGBT的場合。光耦隔離驅(qū)動法對光耦的要求較高,要求光耦速度快,絕緣耐壓高于電源電壓,共模抑制比大。
SEMIKRON公司的SKHI22AH4模塊是應(yīng)用變壓器驅(qū)動原理的驅(qū)動器件。當SKHI22AH4模塊驅(qū)動IGBT時,它的最大工作頻率可達100kHz,完全解決了限制使用頻率問題。SKHI22AH4模塊驅(qū)動IGBT的電路原理圖如圖2。圖2中虛線方框是SKHI22AH4模塊結(jié)構(gòu)簡圖,模塊中分初級和次級兩個部分,這兩個部分是絕緣的,使得驅(qū)動電路具有良好的輸入輸出電隔離能力;模塊有2個input、2個output,一個input對應(yīng)一個output,input是變壓器初級,output是變壓器次級;SKHI22AH4模塊中還有針對短路、過流和電壓不穩(wěn)等錯誤的測量裝置和錯誤信息儲存裝置,用來實現(xiàn)多種電路保護功能。SKHI22AH4模塊的工作原理是:PWM控制信號加在變壓器初級,變壓器次級輸出放大的驅(qū)動信號驅(qū)動IGBT。SKHI22AH4模塊的供電電壓是+15V,當其驅(qū)動2MB1300D-140型號的IGBT時,其驅(qū)動輸出的導通電壓可達+14.2V、關(guān)閉電壓可達-2V,完全滿足減小IGBT動態(tài)功耗對+Vge、-Vge的要求。為了減小ton、toff,在允許的范圍內(nèi)取Ron=3.38,Roff=3.38。在力求減小功率損耗的原則下,在設(shè)計電路保護功能過程中選擇其外圍元器件。
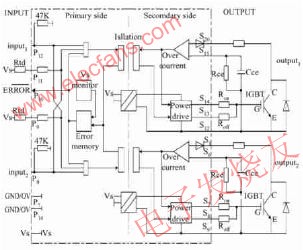
圖2SKHI22AH4模塊驅(qū)動IGBT的原理圖
SKHI22AH4的主要電路保護功能設(shè)計:
1)短路保護功能
在C極和E極間容易出現(xiàn)短路的現(xiàn)象。短路時,電流增大,IGBT的功率損耗迅速增大(隨著電流的平方增大),嚴重時會造成IGBT的損壞。因此,需要對IGBT進行短路保護。如圖2所示,通過對C極和E極的電壓的比較,就實現(xiàn)了對C極和E極間的短路保護。實現(xiàn)短路保護,就要合理確定Rce和Cce的值。具體步驟如下:
①確定Vces的值。Vces既不能過大也不能過小,過大會增加IGBT動態(tài)功率損耗,過小會減弱短路保護能力,一般取5.6V。為了減小IGBT的動態(tài)功率損耗,可以適當減小,但不能小于3.5V。這里取Vces=4V。
②確定Rce。由公式(1)求得Rce=13Ω。
③確定tmin。由SKHI22AH4模塊的特性知,tmince=470pF。

2)互鎖保護功能
SKHI22AH4模塊具有互鎖功能,以防止H橋同側(cè)臂的2個IGBT同時導通。互鎖功能就是:在H橋同側(cè)臂的2個IGBT中,一個IGBT關(guān)閉后要有一段延時,另一個IGBT才能開通。互鎖的鎖定時間ttd=2.7+0.13Rtd(Rtd為互鎖電阻),2.7μs是由于SKHI22AH4模塊中已經(jīng)集成了一個互鎖電阻產(chǎn)生。取Rtd=08,則ttd=2.7μs。
3)錯誤監(jiān)測
SKHI22AH4模塊具有錯誤監(jiān)測功能,它可以對短路、過流、電壓不穩(wěn)等錯誤進行監(jiān)測。當錯誤發(fā)生時,SKHI22AH4模塊停止運行,并將錯誤信號存儲在Errormemory中,直到錯誤排除,才能從新運行。
按照上述驅(qū)動電路設(shè)計,可得SKHI22AH4模塊的驅(qū)動波形,如圖3所示。
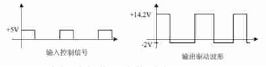
圖3SKHI22AH4模塊輸入輸出的波形圖
H型雙極模式PWM控制的功率轉(zhuǎn)換電路
經(jīng)過上述設(shè)計,得H型雙極模式PWM控制的功率轉(zhuǎn)換電路原理圖,如圖4所示。經(jīng)實驗測試得,圖4所對應(yīng)的功率轉(zhuǎn)換電路中IGBT的ton=1.8Ls、toff=1.4Ls,則IGBT的開關(guān)時間為3.2Ls。
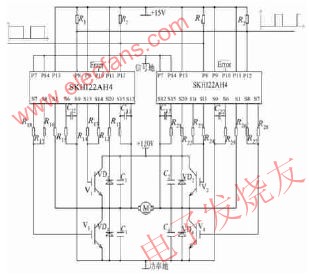
圖4H型雙極模式PWM控制的功率轉(zhuǎn)換電路原理圖
實驗
設(shè)計完H型雙極模式PWM控制的功率轉(zhuǎn)換電路后,還要確定合理的PWM開關(guān)頻率,才能進一步減小功率損耗、實現(xiàn)H型雙極模式PWM控制在大功率伺服系統(tǒng)中的應(yīng)用。
PWM開關(guān)頻率的計算
合理的開關(guān)頻率不但可以進一步減小功率損耗、提高效率,而且還可以使系統(tǒng)性能與連續(xù)系統(tǒng)的性能相差無幾。綜合來看,開關(guān)頻率的確定,受到很多相互矛盾的因素決定:
①為了改善靜摩擦對伺服系統(tǒng)低速性能的影響、使得電動機在零位處于動力潤滑狀態(tài),因 此雙極模式PWM控制工作時考慮微振特性的開關(guān)頻率應(yīng)滿足公式(4);
②為了使開關(guān)頻率不至于對系統(tǒng)的動態(tài)性能產(chǎn)生不良影響,頻率應(yīng)遠大于伺服系統(tǒng)本身的 通頻帶fc,一般應(yīng)滿足經(jīng)驗式(5);
③為了避免引起共振,開關(guān)頻率應(yīng)該高于系統(tǒng)中所有回路的諧振頻率;
④為了提高電動機的利用率,必須限制電流脈動量$Ia,應(yīng)該滿足式(6);
⑤開關(guān)頻率的上限要受到IGBT的開關(guān)損耗和開關(guān)時間的限制,應(yīng)滿足經(jīng)驗式(7)。
以某三軸飛行仿真轉(zhuǎn)臺方位軸伺服系統(tǒng)為例進行計算,該轉(zhuǎn)臺是我們目前國內(nèi)功率最大的轉(zhuǎn)臺之一,功率為11000W,其中方位軸伺服系統(tǒng)的功率為7200W。三軸飛行仿真轉(zhuǎn)臺方位軸電動機參數(shù)如下:力矩系數(shù)KT=82.3N?m/A,供電電壓Us=+120V,電樞電阻Ra=2.48Ω,電樞電感La=0.019H,電機軸上靜摩擦力矩Tf=21010N?m,系統(tǒng)通帶頻率fc=34Hz,額定電流IN=60A,啟動電流Is≈IN,αs=Is/IN≈1,Te=La/Ra=0.0079。
由式(4)~(7)確定開關(guān)頻率范圍340Hz

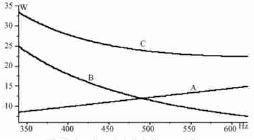
圖5功率損耗曲線
試驗結(jié)果
在某三軸飛行仿真轉(zhuǎn)臺方位軸伺服系統(tǒng)中采用可逆單極模式PWM控制時,方位軸伺服系統(tǒng)的能夠啟動的最低平穩(wěn)速度為0.05°/s;而采用了本文設(shè)計的功率轉(zhuǎn)換電路的H型雙極模式PWM控制時,能夠啟動的最低平穩(wěn)速度為0.01°/s,如圖6所示(橫坐標軸為采樣點,采樣頻率400Hz),方位軸伺服系統(tǒng)的低速特性得到了明顯的提高。圖6某三軸轉(zhuǎn)臺方位軸伺服系統(tǒng)的啟動速度曲線由于電樞電流有脈動量,電動機會有高頻顫動,系統(tǒng)的最低平穩(wěn)速度隨之也有脈動;但脈動量很小,小于0.00025°/s,僅為速度值2.5%。
結(jié)論
本文設(shè)計的H型雙極模式PWM控制的功率轉(zhuǎn)換電路,減小了雙極模式PWM控制的功率損耗;通過計算合理的開關(guān)頻率,功耗進一步減小。使得H型雙極模式PWM控制應(yīng)用在大功率伺服系統(tǒng)中。實際工程應(yīng)用表明:其應(yīng)用在某三軸飛行仿真轉(zhuǎn)臺的方位軸大功率伺服系統(tǒng)中,明顯提高了伺服系統(tǒng)的低速特性;這種提高系統(tǒng)低速特性的方法,在工程實際中具有簡單易行的優(yōu)點。這種功率轉(zhuǎn)換電路設(shè)計在改善大功率伺服系統(tǒng)低速特性中具有較好的實際應(yīng)用價值。