引言
一種液壓式制動能量再生系統(tǒng)(HBRS)應用于對公交車動力系統(tǒng)的改造。由電磁離合器、液壓泵馬達和液壓蓄能器以及相關的機械裝置和油路構(gòu)成的車輛制動能量回收再生裝置,通過分動箱與公交車動力傳動裝置實現(xiàn)并行聯(lián)接。該系統(tǒng)將公交車制動時的動能轉(zhuǎn)換為蓄能器的液壓能儲存,并在車輛加速起步時將液壓能轉(zhuǎn)換為車輛的動能,從而達到節(jié)能減排的目的。
HBRS采用液壓蓄能器作為能量存儲元件。由于液壓蓄能器自身能量存儲的特點決定了系統(tǒng)工作特性的非線性,采用電子控制單元實時調(diào)整變量液壓泵馬達的有效排量可以優(yōu)化系統(tǒng)的操作性能。HBRS控制系統(tǒng)包括周期性任務和1個事件觸發(fā)任務,可以采用時間觸發(fā)模式設計系統(tǒng)。本文針對HBRS控制系統(tǒng)建立了實時性分析模型,分析周期性任務和觸發(fā)任務的特點,設計了基于時間觸發(fā)模式的混合式任務調(diào)度器。
1 系統(tǒng)方案概述
在液壓式制動能量再生控制系統(tǒng)中,駕駛員通過操縱加速踏板和制動踏板來表達加速或減速意圖。而液壓系統(tǒng)中電磁方向閥的通斷、電磁離合器的結(jié)合/分離以及變量泵馬達的有效排量的調(diào)節(jié)都是由電子控制器集中控制自動完成的。控制系統(tǒng)方案如圖1所示。

HBRS控制系統(tǒng)電子控制器完成3大功能:狀態(tài)檢測、有效排量決策和有效排量執(zhí)行邏輯控制。狀態(tài)檢測模塊根據(jù)傳感器數(shù)據(jù)計算當前車速、制動踏板行程、加速踏板行程、蓄能器壓力,并根據(jù)車速進行微分得到車輛加速度,然后將這些狀態(tài)信息傳遞給有效排量決策模塊。有效排量決策模塊根據(jù)制動踏板開關、加速踏板開關和系統(tǒng)使能開關及檔位開關判斷駕駛員操縱意圖,從而決定系統(tǒng)工作模式(制動能量回收模式、制動能量再生模式、制動能量保持模式或強制泄壓模式)。有效排量執(zhí)行邏輯控制模塊根據(jù)車速、車輛加速度和制動踏板位置或加速踏板位置查詢最佳有效排量驅(qū)動電流匹配表,得到目標驅(qū)動電流參數(shù),并根據(jù)車輛加速度對驅(qū)動電流做微調(diào)。如果當前系統(tǒng)工作模式與目標工作模式不符,則發(fā)出控制指令驅(qū)動相應開關電磁閥,使系統(tǒng)進人相應的工作模式,驅(qū)動電磁離合器電磁閥實現(xiàn)電磁離合器的結(jié)合或分離;若當前系統(tǒng)驅(qū)動電流與目標驅(qū)動電流不符,則有效排量執(zhí)行邏輯控制模塊調(diào)整驅(qū)動電流以驅(qū)動液壓泵馬達排量調(diào)整機構(gòu),完成系統(tǒng)工作模式各個電磁閥的驅(qū)動和液壓泵馬達有效排量調(diào)整電流的控制。
2 實時系統(tǒng)建模
2.1 功能模塊劃分
功能模塊是實時系統(tǒng)的基礎研究對象,并且相關聯(lián)的功能模塊組成1個系統(tǒng)任務。在本文研究的液壓式制動能量再生控制系統(tǒng)中,共有13個功能模塊,如表1所列。表中周期功能模塊相對時間軸周期性運行,觸發(fā)模塊只有在制動能量再生和制動能量回收工作模式中運行。

2.2 功能模塊間的互連特征
HBRS控制系統(tǒng)中各功能模塊的互連特征由圖2所示,圖中箭頭表示功能模塊之間的關系(有時序關系和資源共享關系2種),箭頭的方向表示時序,圓圈和方塊表示功能塊。圓圈的功能塊的前提條件互為與關系,方塊功能塊的前提條件是或關系,空心表示功能塊的后續(xù)操作沒有分支,實心表示功能塊具有分支,其后續(xù)功能塊的執(zhí)行由分支邏輯決定:I(x,y,z)為關系,x為前提條件,y為后續(xù)任務,z為共享資源名稱。ua為車速,Iacc為加速踏板行程,lbra為制動踏板行程Pac為蓄能器壓力,a為車輛加速度,Ivg為反饋電流。C1為電磁換向閥驅(qū)動指令,C2為電磁離合器結(jié)合/分離驅(qū)動指令,C3為變量泵馬達有效排量驅(qū)動電流指令,本系統(tǒng)使用脈寬調(diào)制方式控制調(diào)節(jié)電流。
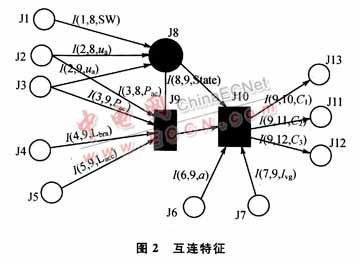
該模型中,有效排量決策模塊J8運行的前提條件是J1~J5先運行,即獲得各種開關狀態(tài)、車速和蓄能器壓力,缺一不可。經(jīng)過邏輯判斷后決定HBRS的工作模式。J8有分支,J8判斷系統(tǒng)工作模式State為能量保持工作模式時,J10直接發(fā)出默認的驅(qū)動命令即可,不觸發(fā)J9。J10控制各電磁換向閥的開關狀態(tài),控制電磁離合器的結(jié)合/分離狀態(tài)。J9在制動能量回收工作模式時,需要獲得車速、制動踏板行程,查詢最佳排量對應的控制電流,在制動能量再生工作模式時,需要獲得車速、加速踏板行程,查詢最佳有效排量對應的控制電流。J10根據(jù)當前車輛制動加速度以及反饋電流的大小,對控制電流值進行修正,并發(fā)出驅(qū)動命令到驅(qū)動模塊。J9和J10均在不同工作模式下,需要不同的傳感器信號或狀態(tài)變量,因此需要添加判斷程序,從而實現(xiàn)在不同工作模式下觸發(fā)不同控制程序的目的。
2.3 任務劃分
根據(jù)任務劃分原則為I/O依賴性、功能內(nèi)聚、任務內(nèi)斂,將13功能模塊劃分為6個任務,如表2所列。9個任務中R1~R6由系統(tǒng)控制處理器芯片調(diào)度實現(xiàn),R7~R9由微控制器集成外設控制。J10和J11由芯片TLE6230GP實現(xiàn)驅(qū)動,J12則由控制芯片的PCA及擴展芯片33486A實現(xiàn),并由單片機PCA模塊實現(xiàn)PWM信號輸出。

3 調(diào)度算法設計
當HBRS使能開關打開時,系統(tǒng)共有4種工作模式:制動能量回收模式、制動能量再生模式、制動能量保壓模式和制動能量強制泄壓模式。HBRS進入何種工作模式由控制系統(tǒng)進行邏輯判斷,因此任務R1工作模式?jīng)Q策組合是周期性運行的任務。若判斷系統(tǒng)進入制動能量保壓工作模式或強制泄壓工作模式,則直接任務R6驅(qū)動組合;R6發(fā)出控制外設的驅(qū)動命令,通過任務R7、R8運行,控制電磁換向閥的通斷實現(xiàn)油路的變換,控制電磁離合器的結(jié)合/分離實現(xiàn)HBRS與車輛原動力傳動系統(tǒng)的分離;若R1判斷系統(tǒng)進入制動能量回收工作模式或者制動能量釋放工作模式,則觸發(fā)任務R4查詢目標驅(qū)動電流值,并觸發(fā)任務R5計算車輛加速度和任務R6計算反饋電流值提供給任務R10以修正目標驅(qū)動電流值;最后,通過任務R9實現(xiàn)對HBRS系統(tǒng)有效排量的調(diào)整。
確定所需的時標間隔的過程是:為了把開銷和功耗降低到最小值,調(diào)度器的時標間隔應該設置為所有任務的運行間隔的“最大公因數(shù)”,并且滿足所有任務的運行時間都應小于調(diào)度時標間隔,以保證調(diào)度程序總是能夠在任何任務需要運行的時候調(diào)用它,還要求盡可能地避免任務的抖動。
于是,在不同的工作模式中控制系統(tǒng)的任務都在確定性時間段內(nèi)完成檢測和驅(qū)動任務,簡化了系統(tǒng)設計的復雜性,更可靠,更安全。
控制系統(tǒng)處理器執(zhí)行任務的時序如圖3所示。

4 仿真
某控制系統(tǒng)基于采用新華龍公司C8051F005最小系統(tǒng)板。首先統(tǒng)計該系統(tǒng)下單個任務運行的瞬時特征,建立實時系統(tǒng)分析模型,實施混合定時調(diào)度算法,并統(tǒng)計CPU利用率和任務延時,進行驗證。
控制系統(tǒng)瞬時特征數(shù)據(jù)如表3所列,其中,任務運行周期T根據(jù)系統(tǒng)性能的需要提出,而且,在開發(fā)平臺上是可行的,最大執(zhí)行時間tE為開發(fā)平臺上反復運行并求取最大值的結(jié)果。

按照混合調(diào)度算法,該9個任務、4個處理器的實時控制系統(tǒng)在各個工作模式下的時序仿真結(jié)果如圖3所示,仿真忽略任務上下文切換消耗的處理器資源。根據(jù)表3,任務的最大公約數(shù)為10 ms,因此時間軸被劃分為周期為10 ms的時間片。
令時標間隔為1.5 ms,開發(fā)平臺下的HBRS混合定時調(diào)度時序如圖4所示,其中空白時間段中處理器處于休眠狀態(tài)。

圖4(a)說明了當HBRS電子控制系統(tǒng)在強制泄壓和保壓工作模式時處理器執(zhí)行任務的時序。此時,處理器根據(jù)任務R3和R2采集的車輛工作狀態(tài)信息,經(jīng)任務R1判斷系統(tǒng)的工作模式,若為強制泄壓或保壓工作模式則執(zhí)行任務R6發(fā)出控制命令。
圖4(b)和圖4(c)說明了當HBRS電子控制系統(tǒng)在制動能量再生工作模式和制動能量回收工作模式時處理器執(zhí)行任務的時序。2個模式的區(qū)別在于任務R4中分別觸發(fā)的子任務為J4和J5。任務R1判斷系統(tǒng)工作于制動能量再生工作模式,觸發(fā)任務R4查詢計算液壓泵馬達有效排量的驅(qū)動電流值并觸發(fā)任務R5采集車輛的負荷狀況對驅(qū)動電流值修正,通過任務R6發(fā)送HBRs系統(tǒng)各電磁方向閥、電磁離合器和液壓泵馬達的驅(qū)動命令。
結(jié)語
本文應用時間觸發(fā)模式設計了液壓式制動能量再生系統(tǒng)的電子控制系統(tǒng)混合調(diào)度器,實現(xiàn)了HBRS的基本功能。通過功能模塊劃分、任務劃分和時間序列的設計可以方便地設計時間觸發(fā)模式調(diào)度器。時間觸發(fā)模式設計的電子控制系統(tǒng)具有安全、成本低和程序簡單的特點。
