摘 要:本文介紹了虛擬儀器技術(shù)" title="虛擬儀器技術(shù)">虛擬儀器技術(shù)在磁軸承數(shù)字控制系統(tǒng)" title="控制系統(tǒng)">控制系統(tǒng)中的具體應(yīng)用。針對磁軸承數(shù)字控制系統(tǒng)" title="數(shù)字控制系統(tǒng)">數(shù)字控制系統(tǒng)的特點(diǎn),采用USB-9100多功能USB數(shù)據(jù)采集模塊與虛擬儀器開發(fā)系統(tǒng)LabVIEW相配合,使復(fù)雜控制系統(tǒng)的設(shè)計與實(shí)現(xiàn)更簡便、更高效。
關(guān)鍵詞:虛擬儀器 磁軸承 數(shù)字控制 LabVIEW
1 虛擬儀器介紹
虛擬儀器(Virtual Instrument,VI)是指通過應(yīng)用程序?qū)⑼ㄓ糜嬎銠C(jī)與儀器硬件結(jié)合起來,用戶通過友好的圖形界面(即虛擬前面板)操作該計算機(jī),如同操作自己定制的一臺傳統(tǒng)儀器一樣,從而完成被測量的采集、分析、判斷、顯示和數(shù)據(jù)存儲等。虛擬儀器具有以下特點(diǎn):突出“軟件就是儀器”的新概念,不需改變硬件,僅通過軟件編程,用戶即可定制特殊用途的儀器;支持開放的工業(yè)標(biāo)準(zhǔn);利用計算機(jī)強(qiáng)大的數(shù)據(jù)處理、傳輸和控制能力,使系統(tǒng)組建、擴(kuò)展更加靈活、簡便,也便于構(gòu)成復(fù)雜的系統(tǒng)。虛擬儀器既可以作為測試儀器單獨(dú)使用,又可以實(shí)現(xiàn)測試、控制與故障診斷一體化。
DAQ(Data Acquisition:數(shù)據(jù)采集)儀器是一種典型的虛擬儀器,它以微型計算機(jī)為平臺,將計算機(jī)硬件(某類總線、特定功能的數(shù)據(jù)采集卡或儀器卡" title="儀器卡">儀器卡)和計算機(jī)軟件(虛擬儀器應(yīng)用軟件)結(jié)合起來,實(shí)現(xiàn)特定的測量和測試功能。DAQ儀器性價比高、設(shè)計手段靈活、通用性強(qiáng),應(yīng)用前景十分廣闊。DAQ儀器按儀器卡的組成方式可分為三類:
(1) 內(nèi)插式:將儀器卡插入微機(jī)內(nèi)部總線上構(gòu)成DAQ儀器,如圖1(a)所示,這是最常用方式;
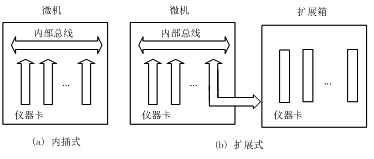
圖1 DAQ儀器基本結(jié)構(gòu)
(2) 擴(kuò)展式:將微機(jī)總線引到擴(kuò)展箱,在擴(kuò)展箱里插入儀器卡構(gòu)成DAQ儀器,如圖1(b)所示,該方式支持更多的儀器卡;
(3) 直接外掛式:在微機(jī)外總線(如并行口,USB,1394)上直接接入儀器卡,該方式避免了PC機(jī)內(nèi)部的噪聲,為儀器設(shè)計提供了更大的空間、更好的隔離性能和更方便的連接形式,特別適用于由便攜式微機(jī)組成的儀器系統(tǒng)。
本文采用通過USB總線直接外掛的DAQ儀器。選擇USB總線,主要考慮到USB總線目前已成為PC機(jī)的標(biāo)準(zhǔn)配置,數(shù)據(jù)傳輸率高。 USB1.1支持兩種數(shù)據(jù)傳送速度:低速為1.5Mbps,全速為12Mbps,而USB2.0提供高達(dá)400Mbps的高速數(shù)據(jù)傳輸,完全可以滿足高性能動態(tài)測試的要求。另外,它還支持熱插拔、支持多設(shè)備連接,減少了PC機(jī)I/O接口數(shù)量。采用USB總線的DAQ儀器具有許多優(yōu)點(diǎn):安裝、攜帶方便;不易受機(jī)箱內(nèi)環(huán)境的干擾;不受計算機(jī)插槽數(shù)量、地址、中斷等限制,可擴(kuò)展性好;在一些電磁干擾較強(qiáng)的測試現(xiàn)場,可以專門對其進(jìn)行電磁屏蔽,避免數(shù)據(jù)失真等。目前采用USB總線的便攜式儀器越來越普遍。
2 磁軸承控制系統(tǒng)
主動磁懸浮軸承系統(tǒng)(簡稱磁軸承)由于具有無機(jī)械摩擦、無接觸磨損、無需潤滑,定位精度高、適應(yīng)的轉(zhuǎn)速范圍廣、對環(huán)境無污染等優(yōu)良特性,在能源、交通、超高速超精密加工、航空航天、機(jī)器人等高科技領(lǐng)域有著廣泛的應(yīng)用前景。磁軸承控制系統(tǒng)組成如圖2所示,主要由轉(zhuǎn)子、位移傳感器、控制器和功率放大器等組成,其中位移傳感器檢測轉(zhuǎn)子偏移平衡位置的位移量,控制器將檢測到的位移偏差按一定的控制律轉(zhuǎn)換成控制信號,控制信號通過功率放大器產(chǎn)生適當(dāng)?shù)目刂齐娏鳎?qū)動電磁鐵產(chǎn)生磁力,從而使轉(zhuǎn)子保持在平衡懸浮位置。
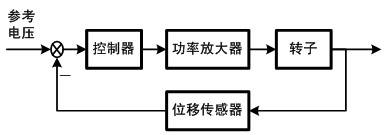
圖2 磁軸承控制系統(tǒng)組成原理圖
磁軸承系統(tǒng)性能(剛度、阻尼及穩(wěn)定性等)的優(yōu)劣主要取決于控制器采用的控制律。模擬控制器雖然在一定程度上可以滿足磁軸承系統(tǒng)的性能要求,但存在著參數(shù)調(diào)整不方便、硬件結(jié)構(gòu)不易改變、難以實(shí)現(xiàn)較先進(jìn)的控制策略等缺點(diǎn)。數(shù)字控制,較之模擬控制具有以下優(yōu)點(diǎn):易于進(jìn)行各種控制策略的試驗;能夠?qū)崿F(xiàn)復(fù)雜的控制器功能;易于進(jìn)行傳感器、偏置和其它參數(shù)的在線標(biāo)定;便于對位移、轉(zhuǎn)速、電流等工況參數(shù)進(jìn)行顯示、記錄及遠(yuǎn)距離傳輸?shù)取?br />
3 虛擬儀器技術(shù)在磁軸承數(shù)字控制中的具體應(yīng)用
基于虛擬儀器和數(shù)字控制的上述優(yōu)點(diǎn),將虛擬儀器技術(shù)引入到磁軸承系統(tǒng)的數(shù)字控制中,大大降低了磁軸承數(shù)字控制系統(tǒng)的設(shè)計、實(shí)現(xiàn)和調(diào)試的復(fù)雜程度,有力地保障了科研人員專心研究更合理、更高效的控制算法" title="控制算法">控制算法。
3.1系統(tǒng)結(jié)構(gòu)及工作原理
應(yīng)用虛擬儀器技術(shù)構(gòu)建的兩自由度磁軸承數(shù)字控制系統(tǒng)結(jié)構(gòu)如圖3,其中USB-9100是臺灣凌華公司出品的一款100kS/s多功能USB接口數(shù)據(jù)采集模塊,它兼容USB1.1 規(guī)范,具有8 路12位差動模擬輸入,可4通道并行采樣,集成了4K容量FIFO緩存,支持最大100kS/s持續(xù)采樣速率和最大500kS/s突發(fā)采樣速率 ;具有2路12位D/A" title="D/A">D/A輸出;32MHz 16位節(jié)拍發(fā)生器和2個16位通用定時器/計數(shù)器; 8 路隔離輸入和8路隔離輸出。從A/D和D/A的指標(biāo)看,USB-9100可以滿足兩自由度磁軸承數(shù)字控制的需要。
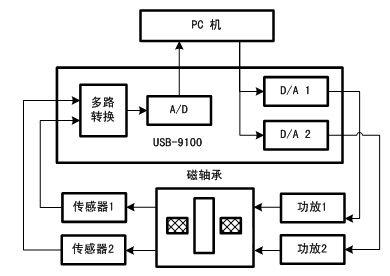
圖3 兩自由度磁軸承數(shù)字控制系統(tǒng)結(jié)構(gòu)框圖
系統(tǒng)的基本控制原理為:在每個控制周期內(nèi),由USB-9100對兩個通道的位移傳感器測量信號進(jìn)行數(shù)據(jù)采集,通過USB傳輸給PC機(jī),由PC機(jī)根據(jù)數(shù)字控制算法計算所需的控制量,數(shù)字控制量通過USB傳輸給USB-9100,由USB-9100實(shí)現(xiàn)兩通道D/A輸出,在所得模擬控制信號控制下,功率放大器驅(qū)動電磁鐵工作,保持磁軸承的轉(zhuǎn)子處于平衡位置。
3.2系統(tǒng)軟件環(huán)境
數(shù)字控制系統(tǒng)使用LabVIEW軟件開發(fā)環(huán)境,LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一種標(biāo)準(zhǔn)的虛擬儀器設(shè)計軟件,它被工業(yè)界、學(xué)術(shù)界和研究實(shí)驗室廣泛接受。LabVIEW采用圖形化編程方式,使用它進(jìn)行系統(tǒng)測試、系統(tǒng)設(shè)計與實(shí)現(xiàn)時,可以大大提高工作效率。LabVIEW應(yīng)用程序包括前面板(Front Panel)和流程圖(Block Diagram)兩部分。前面板是圖形用戶界面,即VI前面板,流程圖提供VI的圖形化源程序,控制和操縱定義在前面板上的輸入和輸出功能。LabVIEW中附加了PID控制工具套件,利用它,可以簡便、高效地設(shè)計控制算法。另外,USB-9100提供了LabVIEW驅(qū)動,方便了編程。
3.3系統(tǒng)功能
USB-9100多功能USB接口數(shù)據(jù)采集模塊與LabVIEW軟件開發(fā)環(huán)境相配合,以PC機(jī)為核心,構(gòu)成一個完整的虛擬儀器系統(tǒng)。虛擬儀器技術(shù)的應(yīng)用,使磁軸承數(shù)字控制的設(shè)計與實(shí)現(xiàn)更為方便、快捷,具體地,能夠?qū)崿F(xiàn)以下功能:
(1)圖形化界面:利用圖形化界面實(shí)時、動態(tài)顯示有關(guān)的系統(tǒng)參數(shù),如位移、轉(zhuǎn)速、電流等,靈活地在線設(shè)定數(shù)字PID控制器的各項參數(shù);
(2)雙工作模式:提供控制和監(jiān)測兩種工作模式,其中控制是主模式,監(jiān)測是輔模式。在控制模式下,只提供基本的圖形功能,以確保數(shù)字控制算法的實(shí)時性;在監(jiān)測模式下,突出圖形顯示功能,除轉(zhuǎn)子位移量,增加線圈電流、轉(zhuǎn)子轉(zhuǎn)速等參數(shù)的動態(tài)顯示。
(3)數(shù)據(jù)存儲與分析:系統(tǒng)運(yùn)行時實(shí)時記錄相關(guān)參數(shù),待系統(tǒng)運(yùn)行結(jié)束,利用LabVIEW的事后記錄波形控件將數(shù)據(jù)重現(xiàn),進(jìn)行頻譜分析和控制系統(tǒng)的評估,為PID控制參數(shù)的優(yōu)化設(shè)計提供參考。
(4)預(yù)留網(wǎng)絡(luò)擴(kuò)展接口:充分挖掘虛擬儀器的網(wǎng)絡(luò)編程能力,針對磁軸承控制系統(tǒng),為將來開展網(wǎng)絡(luò)化系統(tǒng)監(jiān)測與控制奠定基礎(chǔ)。
4 結(jié)束語
隨著虛擬儀器硬件和軟件開發(fā)技術(shù)的不斷發(fā)展,虛擬儀器技術(shù)不僅適用于儀器設(shè)計和儀器控制領(lǐng)域,在復(fù)雜控制系統(tǒng)的設(shè)計與實(shí)現(xiàn)方面也有非常廣泛的應(yīng)用。虛擬儀器技術(shù)的應(yīng)用,降低了復(fù)雜控制系統(tǒng)的設(shè)計難度,提高了系統(tǒng)實(shí)現(xiàn)的效率。
參考文獻(xiàn)
[1] G施韋策,H布魯勒,A特拉克斯勒著,虞烈,袁崇軍譯,主動磁軸承基礎(chǔ)、性能及應(yīng)用,北京:新時代出版社,1997.
[2] Gary W.Johnson,Richard Jennings著,武嘉澎,陸勁昆譯,LabVIEW圖形編程,北京:北京大學(xué)出版社,2002.
[3] USBDAQ-9100MS LabVIEW Interfaces for USBDAQ Series User Guide,ADLINK Technology Inc,2001.
[4] USBDAQ-9100MS LabVIEW Interfaces for USBDAQ Series Function Reference,ADLINK Technology Inc,2001.
