
0 引言
隨著IT技術的發(fā)展,對信息產(chǎn)品的需求也越來越旺盛,導致信息產(chǎn)品的生產(chǎn)一直處于一個高水平發(fā)展的軌道上。我國已成為世界制造業(yè)中心,信息產(chǎn)品制造業(yè)功不可沒。但與之對應的制造裝備和生產(chǎn)水平與發(fā)達國家相比,卻有著較大的差距。很多高檔設備仍需要大量從國外進口。本文提出了采用微電腦技術和機電一體化技術的電子產(chǎn)品制造流水線上使用的自動送板機的設計方案。下面給出了自動送板機硬件系統(tǒng)、軟件系統(tǒng)以及仿真分析結(jié)果。
1 硬件系統(tǒng)
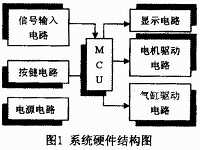
本系統(tǒng)的硬件系統(tǒng)如圖1所示。主要由信號輸入電路、按鍵電路、電源電路、微電腦控制器、顯示電路、驅(qū)動電路組成。
1.1 信號輸入電路
本部分電路主要完成對輸入信號的調(diào)理,然后傳送給中央處理器。輸入信號主要有下位機(自動帖片機或自動插裝機)的送板信號:當下位機空閑時,會給出一個本機空閑信號,供上位機對本機的工作狀態(tài)進行判斷;各傳感器發(fā)送的信號:傳感器信號主要有PCB板周轉(zhuǎn)箱(以下簡稱周轉(zhuǎn)箱)在位信號、周轉(zhuǎn)箱卡緊信號、周轉(zhuǎn)箱的上/下限位置信號、推板氣缸到位信號等。
1.2 按鍵電路
主要有上行、下行、板間距選擇、啟動、停止等按鍵。上、下行鍵主要用于手動控制電機,進而驅(qū)動控制周轉(zhuǎn)箱托架沿絲杠付行走,上行鍵主要用于控制周轉(zhuǎn)箱托架上行,一般是在啟用新周轉(zhuǎn)箱時,用于確定其起始與終止工作位置,也用于未放滿PCB板的周轉(zhuǎn)箱起始與終止位置的設置。板間距選擇鍵是設置周轉(zhuǎn)箱內(nèi)PCB板之間的間距,默認值為1格,每按一下該鍵,間距加1。當起始位置和間距設定好后,按啟動鍵,系統(tǒng)按程序設定自動運行。停止鍵用于緊急情況時的電機停止控制。由于按鍵不多,電路采用按鍵與MCU的I/O口直接相連接的方法。
1.3 電源電路
本系統(tǒng)控制、驅(qū)動和執(zhí)行部分采用直流電源,主要有+5V、+12V、+36V。采用開關電源產(chǎn)生所需要的各直流電。
1.4 微電腦控制器
這是本系統(tǒng)的核心部分,綜合考慮系統(tǒng)的需要、性價比和市場占有率,采用ATMEL公司的8位單片機AT89C51作為主控制器。AT89C51是一種帶4K字節(jié)閃存的低電壓、高性能CMOS8位微處理器。該器件采用ATMEL高密度非易失存儲器制造技術制造,與工業(yè)標準的MCS-51指令集和輸出管腳相兼容。由于將多功能8位CPU和閃存組合在單個芯片中,是一種高效微控制器,為很多嵌入式控制系統(tǒng)提供了一種靈活而價廉的方案。
1.5 顯示電路
顯示電路主要完成系統(tǒng)各部分工作狀態(tài)的顯示。顯示內(nèi)容主要有:工作狀態(tài)(上行、下行、待機)、板間距、報警等。
1.6 驅(qū)動電路
本部分電路主要完成對各執(zhí)行機構(gòu)的驅(qū)動,驅(qū)動對象主要有絲杠付和3個氣缸。絲杠付主要承擔對周轉(zhuǎn)箱托架的提升和降落,考慮到提升重量和控制精度,選擇采用步進電機對絲杠付進行驅(qū)動。由中央控制器產(chǎn)生相應的步進控制信號,經(jīng)過前置和功率放大電路,驅(qū)動步進電機。3個氣缸的作用主要是:一個用來實現(xiàn)對到位的PCB板,前推至下位機入口軌道處,另兩個用來把周轉(zhuǎn)箱托架卡緊在絲杠付上,保證運行中周轉(zhuǎn)箱托架的固定。
2 軟件系統(tǒng)
軟件系統(tǒng)主要由主程序、按鍵子程序、顯示子程序、步進電機驅(qū)動子程序、延時子程序等構(gòu)成。分述如下:
2.1 主程序
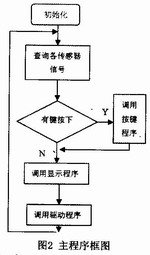
主程序的主要功能是循環(huán)調(diào)用顯示子程序、按鍵子程序,查詢各輸入信號狀態(tài),根據(jù)按鍵設定的各種參數(shù)和各輸入信號狀態(tài)控制各執(zhí)行機構(gòu),完成對PCB周轉(zhuǎn)箱托架系統(tǒng)的傳動控制,以及對PCB板的有序傳送,判別系統(tǒng)運行狀態(tài)是否異常,并及時報警或解除報警。主程序框圖如圖2所示。
2.2 按鍵子程序
根據(jù)按鍵電路結(jié)構(gòu),采用獨立式直接讀取法。由主程序按優(yōu)先級順序,周期性查詢各相關I/O口狀態(tài),并將其保存在特定存貯器內(nèi),供主程序需要時查找和使用。
2.3 顯示子程序
根據(jù)設定的參數(shù),及時更新各指示器狀態(tài)的存貯數(shù)據(jù),根據(jù)主程序調(diào)用指令,將存貯的顯示數(shù)據(jù)輸出給各顯示驅(qū)動電路,特別是當系統(tǒng)運行異常時,根據(jù)系統(tǒng)運行異常報警信號,驅(qū)動報警燈閃爍。
2.4 驅(qū)動子程序
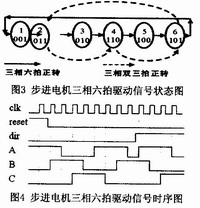
驅(qū)動子程序主要負責生成步進電機驅(qū)動器所需要的信號。當上行鍵或下行鍵按下,或者根據(jù)主程序運行結(jié)果,需要提升或降落周轉(zhuǎn)箱托架,主程序會調(diào)用步進電機驅(qū)動子程序。步進電機采用三相六拍工作方式,根據(jù)絲杠付螺紋間距,計算出步進電機每步進程,再根據(jù)周轉(zhuǎn)箱板間距,確定不同工況下,步進電機的正/反轉(zhuǎn)步數(shù),這些步數(shù)保存在各相應存貯器里,供主程序調(diào)用驅(qū)動子程序時使用。圖3和圖4分別為步進電機三相六拍工作方式時驅(qū)動信號的狀態(tài)圖和時序圖。
3 結(jié)論
根據(jù)以上系統(tǒng)硬件和軟件結(jié)構(gòu),制作出相應的PCB電路板和程序,同時委托機械加工企業(yè)制作出配套的機械結(jié)構(gòu)。經(jīng)實際運行,表明本系統(tǒng)能很好地與自動插裝機配套協(xié)調(diào)工作,完成為下位機自動送板的任務。