
摘 要: 基于軟件無(wú)線電" title="軟件無(wú)線電">軟件無(wú)線電擴(kuò)頻" title="擴(kuò)頻">擴(kuò)頻通信中的載波頻偏及收發(fā)兩端信源速率不匹配進(jìn)行了研究,并提出了實(shí)現(xiàn)擴(kuò)頻同步的解決算法。
關(guān)鍵詞: 軟件無(wú)線電 DSP 擴(kuò)頻通信
擴(kuò)頻通信提供了一種抗干擾的有效途徑。由于采用了偽隨機(jī)編碼擴(kuò)展頻譜,以及相關(guān)接收技術(shù),使其具有很強(qiáng)的抗干擾性能。軟件無(wú)線電[4]SDR(Software Defined Radio)是近年來(lái)發(fā)展起來(lái)的一門(mén)新興學(xué)科。它采用數(shù)字信號(hào)處理技術(shù),在可編程控制的通用硬件平臺(tái)上,利用軟件來(lái)定義無(wú)線電臺(tái)的各部分功能。其核心思想是在盡可能靠近天線的地方使用寬帶“數(shù)字/模擬”轉(zhuǎn)換器,盡早地完成信號(hào)的數(shù)字化,從而使得無(wú)線電臺(tái)的功能盡可能地用軟件來(lái)定義和實(shí)現(xiàn)。基于軟件無(wú)線電進(jìn)行擴(kuò)頻通信系統(tǒng)設(shè)計(jì)具有設(shè)計(jì)靈活、易于調(diào)試、縮短系統(tǒng)開(kāi)發(fā)時(shí)間,同時(shí)還具有可兼容性,是未來(lái)的發(fā)展趨勢(shì)。
1 系統(tǒng)介紹
在系統(tǒng)發(fā)射端,數(shù)據(jù)流經(jīng)過(guò)2比特串并轉(zhuǎn)換后分為I、Q兩路,然后對(duì)I、Q兩路數(shù)據(jù)進(jìn)行擴(kuò)頻。I路和Q路所選用的擴(kuò)頻碼子不相同,它們相互正交。接著擴(kuò)頻后的I、Q路信號(hào)分別通過(guò)平方根升余弦濾波,最后進(jìn)行正交調(diào)制,將信號(hào)發(fā)射出去。系統(tǒng)發(fā)射端原理圖如圖1所示。

系統(tǒng)接收端" title="接收端">接收端原理圖如圖2所示。在接收端,采用正交下變頻技術(shù)將接收信號(hào)頻帶搬移到零中頻,這樣便于DSP處理,然后利用低通濾波濾除基帶帶外噪聲,再進(jìn)行A/D變換,變換成可處理的數(shù)字信號(hào),然后送入DSP;在DSP內(nèi)進(jìn)行同步搜索和頻偏估計(jì),在同步搜索成功的基礎(chǔ)上,糾正載波頻偏和調(diào)整碼元采樣速率;進(jìn)入同步跟蹤環(huán)節(jié),它鎖定同步信息并跟蹤載波頻偏變化,然后進(jìn)行擴(kuò)頻碼的非相干解擴(kuò)解調(diào),最后輸出原始信息。
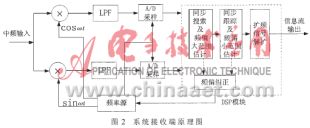
系統(tǒng)正常工作是建立在同步的基礎(chǔ)上,為了保證收端與發(fā)端同步,接收端的頻率源" title="頻率源">頻率源采用直接數(shù)字頻率合成器(Direct Digital Frequency Synthesis 簡(jiǎn)稱 DDS或DDFS)。它受DSP控制,通過(guò)DSP的控制,調(diào)整收端頻率,最終實(shí)現(xiàn)收發(fā)兩端同步。
系統(tǒng)基于軟件無(wú)線電開(kāi)發(fā),其關(guān)鍵點(diǎn)是利用DSP實(shí)時(shí)處理數(shù)據(jù)。為了保證實(shí)時(shí)處理數(shù)據(jù),系統(tǒng)選用的DSP器件為TI公司生產(chǎn)的高速定點(diǎn)數(shù)字信號(hào)處理芯片TMS320C6416[4],其運(yùn)行時(shí)鐘目前最高可達(dá)700MHz,單指令周期內(nèi)最多可支持八條指令并行運(yùn)行,故運(yùn)算速度最高可達(dá)5600MIPS,是目前業(yè)界最快的數(shù)字信號(hào)處理器。該DSP在系統(tǒng)中主要負(fù)責(zé)同步的提取,識(shí)別有用信號(hào),以及解擴(kuò)后信號(hào)的處理。采用基于軟件無(wú)線電設(shè)計(jì)的思想符合通信系統(tǒng)數(shù)字化、實(shí)時(shí)化的發(fā)展趨勢(shì)。
2 系統(tǒng)同步問(wèn)題分析
系統(tǒng)的同步是一個(gè)關(guān)鍵問(wèn)題,系統(tǒng)的正常工作須建立在同步的基礎(chǔ)上。下面就系統(tǒng)同步的核心問(wèn)題進(jìn)行分析,分析引發(fā)同步不確定的因素可能造成的影響。
2.1 同步的不確定性因素
引發(fā)同步不確定性的因素主要有以下幾方面:
(1) 頻率源通信中所用到的頻率源
晶振并不是理想中的頻率源,它主要受以下兩方面影響:
·頻率準(zhǔn)確度,晶振的實(shí)際頻率總與標(biāo)稱頻率存在一定差異;
·頻率穩(wěn)定度,它主要由溫度變化引起。
由于頻率源之間存在的頻偏和頻率源的頻率漂移會(huì)造成發(fā)射端與接收端的載波頻率不一致和載波的漂移,使系統(tǒng)性能下降。另一方面,它會(huì)造成收發(fā)兩端信息流" title="信息流">信息流速率不一致,當(dāng)發(fā)端信息流速率大于收端速率時(shí),可能造成信息丟失,當(dāng)發(fā)端信息流速率小于收端速率時(shí),收端會(huì)錯(cuò)誤地多收數(shù)據(jù)。因此,系統(tǒng)需要保證收發(fā)端頻率一致。
(2) 電波傳播的時(shí)延
由于發(fā)射端與接收端相隔一定距離,以及頻偏的存在,在時(shí)間上的積累反映為載波的相偏。
(3) 多普勒頻移
它是由發(fā)射端與接收端相對(duì)位置的變化,引起頻率和傳輸時(shí)間的變化。
(4) 多徑效應(yīng)
它是在傳輸過(guò)程中由于多路徑傳播引起的。它主要影響系統(tǒng)中碼相位、載波頻率相位延遲造成同步的不確定。
在衛(wèi)星通信中需要考慮的主要是頻率源的穩(wěn)準(zhǔn)度和多普勒現(xiàn)象。
2.2 同步問(wèn)題的影響分析
2.2.1 同步中的載波頻偏分析
為了便于分析,這里暫時(shí)忽略信道噪聲的影響,則發(fā)射端信號(hào)為: 
式中T為碼元速率的倒數(shù),△f為接收端載波相對(duì)于發(fā)送端載波頻率的偏移,Φ為接收端相對(duì)于發(fā)送端的未知相偏 (由兩載波的相位差及信道時(shí)延造成)。
由上述推導(dǎo)不難發(fā)現(xiàn),由于頻偏(△f)的存在,它對(duì)相關(guān)峰有一定影響,呈Sa(π△fT)關(guān)系。在頻偏小時(shí),它對(duì)于求相關(guān)峰的影響可以忽略。
2.2.2 收發(fā)兩端信息流頻率源不一致問(wèn)題分析
如果收發(fā)兩端真正同步,那么發(fā)端的信息流速率應(yīng)與收端解碼速率一致,而一般對(duì)碼片采樣點(diǎn)為一整數(shù),那么此時(shí)收端采樣頻率(fs)應(yīng)與發(fā)端擴(kuò)頻碼速率(RN)的比值為一整數(shù);不妨設(shè)為M,則有:
從上面推導(dǎo)還可知載波的頻偏只影響相關(guān)峰峰值,不影響對(duì)擴(kuò)頻碼采樣獲得的樣點(diǎn)數(shù)。然而,如果收端與發(fā)端之間的信息流頻率不一致,采樣的一條擴(kuò)頻碼的點(diǎn)數(shù)N′S可能不等于NS;如果采樣速率f′S>M×RN,則估計(jì)出的下一幀擴(kuò)頻碼起始位置就比實(shí)際的起始位置要偏后;為了盡可能減少收發(fā)兩端信息流頻偏值,應(yīng)盡可能選用穩(wěn)準(zhǔn)度較高的晶振,盡可能保證傳一幀擴(kuò)頻碼的時(shí)間TS內(nèi)實(shí)際采樣點(diǎn)與理論采樣點(diǎn)相差很小。然而,在同步搜索階段,由于沒(méi)有任何有用信息,在DSP處理時(shí),運(yùn)算量非常大,要判決擴(kuò)頻碼的起始位置,同時(shí)估計(jì)系統(tǒng)的載波頻偏,一般不可能實(shí)時(shí)處理完畢,這就需要采取拋幀處理。即在處理當(dāng)前幀時(shí),將隨后的若干幀丟掉,為了準(zhǔn)確估計(jì)所拋幀數(shù),一般利用定時(shí)器的定時(shí)功能丟棄數(shù)據(jù)從而間接實(shí)現(xiàn)準(zhǔn)確拋數(shù)據(jù)幀數(shù)。前提是先假設(shè)收發(fā)數(shù)據(jù)流一致,通過(guò)估計(jì)傳一幀擴(kuò)頻碼所需時(shí)間來(lái)估計(jì)需要拋幀數(shù)據(jù)的時(shí)間。然而,實(shí)際中一般收發(fā)數(shù)據(jù)流不一致,雖然差異較小,但這樣可能因?yàn)槔塾?jì)偏差最后使得起始位置偏離所估計(jì)的位置。這就需用DSP控制DDS來(lái)調(diào)整接收端頻率源,保證收發(fā)兩端頻率源一致。
3 基于DSP的同步算法
3.1 載波頻偏估計(jì)算法
對(duì)于載波同步時(shí)出現(xiàn)的載波頻偏估計(jì)算法較多,時(shí)域頻偏估計(jì)和糾正的方法有多種,例如:phase lock loop(PLL)法、Fitz 算法、Maximum likelihood(ML)算法、Data aided(DA)算法、Difference feedforward estimation(DFE)算法、 Decision Directed Methods (DDM)算法以及Automatic frequency control(AFC)法。在DSP中用得較多的是DFE算法[2],它是利用相鄰兩幀的相位差來(lái)估計(jì)頻偏。
頻域估計(jì)頻偏算法是利用FFT變換,通過(guò)循環(huán)移位實(shí)現(xiàn)頻譜搬移,在頻域作相關(guān)運(yùn)算,或退出頻域后再在時(shí)域作相關(guān)處理,通過(guò)估計(jì)相關(guān)峰最大值所對(duì)應(yīng)的頻偏位置獲得頻偏大小。
在DSP處理時(shí)的搜索階段,可以通過(guò)計(jì)算相隔N幀的相位差來(lái)估計(jì)頻偏。

這里考慮的頻偏相對(duì)信息速率不大[1]。如果相對(duì)頻偏較大,為了糾正大的頻偏,可以采取步進(jìn)措施。當(dāng)DSP在同步搜索階段檢測(cè)不到信號(hào)時(shí),通過(guò)DDS微調(diào),改變下變頻頻率,從而實(shí)現(xiàn)廣域糾頻偏[1]。
3.2 收發(fā)端信息流不一致解決算法
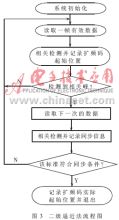
對(duì)于收端信息流與發(fā)端信息流速率不一致的情況,由上面基于軟件無(wú)線電處理解擴(kuò)分析知道,實(shí)際中一般存在收發(fā)數(shù)據(jù)流不一致,雖然差異較小,但這樣可能因?yàn)槔塾?jì)偏差最后使得起始位置偏離所估計(jì)的位置。因此在運(yùn)算時(shí),為了獲得精確的擴(kuò)頻碼起始位置,需要一定措施;如果直接處理,可以采用多級(jí)逼近法:開(kāi)始時(shí)判決在一定的擴(kuò)頻碼起始位置范圍,接收的數(shù)據(jù)經(jīng)過(guò)相關(guān)處理,是否滿足判決條件;然后基于上一次的同步碼位置,進(jìn)一步壓縮同步碼的起始位置范圍,直到找到同步碼的真正起始位置。對(duì)于本系統(tǒng)采用二級(jí)逼近法實(shí)現(xiàn),流程圖如圖3所示。
但是該算法不夠精練,需要進(jìn)一步改進(jìn),下面提出一種改進(jìn)算法:相對(duì)-實(shí)際兩步法算法。它分兩步進(jìn)行,在檢測(cè)到有效信息時(shí),先利用相對(duì)位置估計(jì)同步碼的起始位置,它的思路是連續(xù)作兩次同步搜索,記錄各自的擴(kuò)頻碼起始位置,然后用后一次的同步起始位置減去前一次的同步起始位置,進(jìn)行模擴(kuò)頻碼碼長(zhǎng)處理。如果獲得的結(jié)果為零,則說(shuō)明收發(fā)兩端數(shù)據(jù)流頻率一致;如果不為零,說(shuō)明系統(tǒng)兩端收發(fā)頻率不一致;如果大于零,則說(shuō)明接收方采樣速率慢,需要調(diào)快收端頻率;如果小于零,則說(shuō)明接收方采樣速率快,需要調(diào)慢收端頻率;當(dāng)最終調(diào)整到系統(tǒng)收發(fā)頻率一致時(shí),系統(tǒng)進(jìn)入跟蹤階段,系統(tǒng)在跟蹤階段完成數(shù)據(jù)的解擴(kuò)。由于晶振的飄移特點(diǎn),在跟蹤階段需要進(jìn)行同步跟蹤,但此時(shí)跟蹤范圍縮小,它只需驗(yàn)算擴(kuò)頻碼起始位置及其前后各幾個(gè)點(diǎn),具體視系統(tǒng)要求而定。
采用DSP進(jìn)行解擴(kuò)不同于采用純硬件解擴(kuò),它不但需要考慮載波頻偏的影響,還需要考慮系統(tǒng)同步過(guò)程中估計(jì)的擴(kuò)頻碼起始位置與實(shí)際的擴(kuò)頻碼起始位置不一致的情況,即同步起始位置飄移問(wèn)題,以及系統(tǒng)同步以后如何保證系統(tǒng)不丟失同步信息。本文就以上兩種情況分別提出相應(yīng)的算法,以上算法已在某系統(tǒng)中采用,經(jīng)試驗(yàn)證明可以滿足系統(tǒng)要求。
參考文獻(xiàn)
1 曾志斌,褚振勇,易克初.一種基于偽頻偏的載波恢復(fù)算法.西安電子科技大學(xué)學(xué)報(bào), 2004;31(5)
2 Yimin Jiang,Robert L.Richmond,John S.Baras. Carrier Fre-quency Estimation of MPSK Modulated Signals[A],CSHCN, International Conferenceon Communications: [C] Vancouver, Canada: NASA and Hughes Network Systems,1999, (ISR T.R. 99-10)1~22
3 TMS320C64x Technical Overview, TEXES INSTRUMENTS. Literature Number: SPRU395A September 2000.4
4 楊小牛,樓才義,徐建良.軟件無(wú)線電原理及其應(yīng)用.北京:電子工業(yè)出版社, 2001