該文把模糊控制算法和PID控制算法有機(jī)的結(jié)合起來,形成了模糊PID控制算法,。該算法具有很強(qiáng)的自適應(yīng)性,,它能夠根據(jù)外界條件的變化自動(dòng)修正PID的控制參數(shù)。
1 設(shè)計(jì)思想
其中:u(k)為第k次控制時(shí)控制器的輸出,;
ec(k)為第k次控制時(shí)的偏差變化,;
Kp(k)為第k次控制時(shí)控制器的比例系數(shù);
Ki(k)為第k次控制時(shí)控制器的積分系數(shù),;
d(k)為第k次控制時(shí)控制器的微分系數(shù),;
u(k-1)為第k-1次控制時(shí)控制器的積分累和量,即 
2 模糊PID控制器
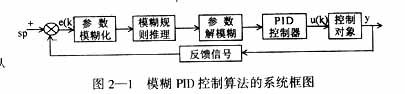
如圖2—1所示,,模糊PID控制共包括參數(shù)模糊化,、模糊規(guī)則推理、參數(shù)解模糊,、PID控制器等幾個(gè)重要組成部分,。計(jì)算機(jī)根據(jù)所設(shè)定的輸入sp和反饋信號(hào),計(jì)算實(shí)際位置和理論位置的偏差e(k)以及當(dāng)前的偏差變化ec(k),,根據(jù)模糊規(guī)則進(jìn)行模糊推理,,接著對(duì)模糊參數(shù)進(jìn)行解模糊,輸出PID控制器的比例,、積分,、微分系數(shù)。此外,,為了彌補(bǔ)一般模糊控制分檔造成的階梯變化,,系統(tǒng)中解模糊輸出的并非控制器的實(shí)際參數(shù),而是控制器參數(shù)的修正量,??刂破鞯膶?shí)際參數(shù)為 dKd0。其中Cp,、Ci,、Cd分別為比例修正系數(shù),、積分修正系數(shù)和微分修正系數(shù)。Kp0,、Ki0,、Kd0稱為控制參數(shù)初值,它們由用戶設(shè)定,,因此,,用戶可以對(duì)控制參數(shù)進(jìn)行宏觀調(diào)節(jié),這在一定程度上可以彌補(bǔ)模糊推理在進(jìn)行簡化時(shí)忽略參數(shù)之間耦合關(guān)系所造成的誤差,。增強(qiáng)了系統(tǒng)的魯棒性,。
dKd0。其中Cp,、Ci,、Cd分別為比例修正系數(shù),、積分修正系數(shù)和微分修正系數(shù)。Kp0,、Ki0,、Kd0稱為控制參數(shù)初值,它們由用戶設(shè)定,,因此,,用戶可以對(duì)控制參數(shù)進(jìn)行宏觀調(diào)節(jié),這在一定程度上可以彌補(bǔ)模糊推理在進(jìn)行簡化時(shí)忽略參數(shù)之間耦合關(guān)系所造成的誤差,。增強(qiáng)了系統(tǒng)的魯棒性,。
根據(jù)PID控制的基本特性,在不同的e(k)和ec(k)時(shí),,對(duì)Kp,、Ki、Kd的要求也不同:
?。?)當(dāng)|e(k)|很大時(shí),,要盡快消除偏差,提高響應(yīng)速度,,Kp應(yīng)該取大一些,。為了避免出現(xiàn)超調(diào)現(xiàn)象,Ki,、Kd最好為零,。
(2)當(dāng)偏差較小時(shí),,為繼續(xù)消除偏差并防止超調(diào)過大,,產(chǎn)生振蕩,Kp應(yīng)減小,,Ki可取較小值,。Kd的值視|ec(k)|而定。
?。?)當(dāng)e(k)與ec(k)同號(hào)時(shí),,被控量朝著偏離給定值的方向變化;而e(k)與ec(k)異號(hào)時(shí)被控量朝著接近給定值的方向變化,。因此,,當(dāng)被控量接近給定值時(shí),反號(hào)的比例作用阻礙積分作用,,因而避免了積分超調(diào)及隨之帶來的振蕩,,但被控量遠(yuǎn)未接近給定值并向給定值變化時(shí),則由于這兩項(xiàng)反向,將會(huì)減慢控制過程,。在e(k)較大,,ec(k)為負(fù)值時(shí),Kp取負(fù)值,,這樣可以加快控制的動(dòng)態(tài)過程,。
(4)當(dāng)ec(k)很大時(shí),,Kp應(yīng)該取小值,,Ki取值應(yīng)大些,反之亦然,。
(5)微分環(huán)節(jié)主要用來控制偏差變化ec(k),,減小超調(diào),,克服振蕩,在多電機(jī)同步控制系統(tǒng)中,,不希望速度發(fā)生快速變化,,而且系統(tǒng)超調(diào)一般不會(huì)太大,所以在具體設(shè)計(jì)中并沒有對(duì)微分系數(shù)進(jìn)行模糊控制,,即Kd=Kd0,、Cd=1。
根據(jù)以上分析,,把e(k),、ec(k)和Cp的論域分為15個(gè)等級(jí),分別記作-7,,-6,,-5,-4,,-3,,…,+6,,+7,;把語言變量e(k)、ec(k)和Cp的取值分為“負(fù)大(NL)”,、“負(fù)中(NM)”,、“負(fù)小(NS)”,、“正大(PL)”,、“正中(PM)、“正小(PS)和“零(Z)”等7個(gè)語言值,。隸屬函數(shù)根據(jù)上述規(guī)則和經(jīng)驗(yàn)由主觀確定,,推理規(guī)則采用“IFAANDBTHENC”的形式,模糊關(guān)系表示為 :pk為第k條規(guī)則對(duì)應(yīng)的模糊關(guān)系矩陣,;Mek為第k條規(guī)則中偏差取值的模糊向量,;Meck為第k條規(guī)則中偏差變化取值的模糊向量;
:pk為第k條規(guī)則對(duì)應(yīng)的模糊關(guān)系矩陣,;Mek為第k條規(guī)則中偏差取值的模糊向量,;Meck為第k條規(guī)則中偏差變化取值的模糊向量; ,,積分修正系數(shù)的計(jì)算過程與此類似,,不再贅述。最后根據(jù)修正系數(shù)計(jì)算出實(shí)際的PID控制參數(shù),,并運(yùn)用到控制系統(tǒng)中去,,使整個(gè)系統(tǒng)穩(wěn)定、可靠地運(yùn)行,。
,,積分修正系數(shù)的計(jì)算過程與此類似,,不再贅述。最后根據(jù)修正系數(shù)計(jì)算出實(shí)際的PID控制參數(shù),,并運(yùn)用到控制系統(tǒng)中去,,使整個(gè)系統(tǒng)穩(wěn)定、可靠地運(yùn)行,。
3 多電機(jī)同步控制的基本方案
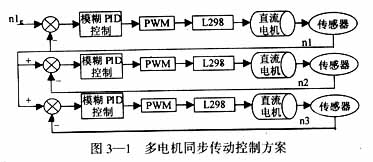
g為系統(tǒng)所設(shè)定的主令電機(jī)速度,。n1、n2和n3為3臺(tái)電機(jī)的輸出速度,,采用上述模糊PID控制的原理對(duì)系統(tǒng)進(jìn)行調(diào)節(jié),,可使各電機(jī)的運(yùn)行速度都快速穩(wěn)定地向主令速度值靠攏。
同步控制裝置采用89C51單片機(jī)作為主機(jī),,以可逆計(jì)數(shù)器193作為相頻鑒別器,。可逆計(jì)數(shù)器的作用是對(duì)參考信號(hào)的脈沖進(jìn)行加/減計(jì)數(shù),。由于脈沖數(shù)是脈沖信號(hào)頻率對(duì)時(shí)間的積分,,因此,當(dāng)可逆計(jì)數(shù)器輸出為常數(shù)時(shí),,兩信號(hào)的頻率相等,。系統(tǒng)的宏觀調(diào)控由上位機(jī)通過通訊控制器進(jìn)行設(shè)定,協(xié)調(diào)則由計(jì)數(shù)器鑒頻電路利用模糊PID控制算法進(jìn)行控制,。具體的硬件電路[1]主要包括:傳感器計(jì)數(shù)和方向脈沖產(chǎn)生及定寬電路,、脈沖前沿錯(cuò)開電路、可逆計(jì)數(shù)器鑒頻電路,、數(shù)字PWM產(chǎn)生電路以及功率放大器驅(qū)動(dòng)電路,。其中:脈沖產(chǎn)生定寬電路可以使計(jì)數(shù)器計(jì)數(shù)脈沖的寬度保持相同;脈沖前沿錯(cuò)開電路是為了防止可逆計(jì)數(shù)器的加/減脈沖同時(shí)到來,,影響計(jì)數(shù)器的正常工作,。
4 模糊PID在多電機(jī)同步控制中的應(yīng)用
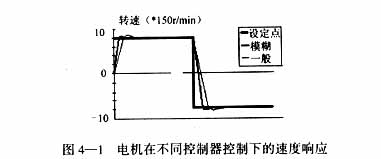

針對(duì)以上系統(tǒng)進(jìn)行了一系列實(shí)驗(yàn)。首先,,測(cè)試了在外界負(fù)載不變的情況下,,系統(tǒng)對(duì)不同主令速度的響應(yīng)能力。實(shí)驗(yàn)曲線如圖4—1所示。粗實(shí)線為所設(shè)定的主令速度,,細(xì)實(shí)線為在一般PID控制器控制的情況下,,某電機(jī)的速度響應(yīng)曲線。較粗實(shí)線為在模糊PID控制器控制的情況下,,同一電機(jī)的速度響應(yīng)曲線,。
其次,圖4—2給出的是系統(tǒng)主令速度不變,,在有階躍響應(yīng)的作用以及電機(jī)所帶負(fù)載不同時(shí),,兩種控制器對(duì)電機(jī)的不同控制效果。其中圖4—2a是模糊PID控制器的控制效果,;圖4—2b是一般PID控制器的控制效果,。(細(xì)實(shí)線為電機(jī)滿載時(shí)的曲線,粗實(shí)線為電機(jī)半載時(shí)的曲線)
5 結(jié) 論
模糊PID控制器在多電機(jī)同步控制裝置中的應(yīng)用大大增強(qiáng)了系統(tǒng)的魯棒性,,提高了系統(tǒng)的動(dòng)態(tài)響應(yīng)能力,,該裝置已經(jīng)在山東魯能承壓部件檢測(cè)機(jī)器人中得到應(yīng)用,幾個(gè)月來,,運(yùn)行情況穩(wěn)定,控制效果良好,。
[參考文獻(xiàn)]
[2] 徐 軍,,李彥明,等.承壓管道檢測(cè)機(jī)器人中多電機(jī)同步控制裝置的研究[J].機(jī)電工程.
[3] J.P.M.M.Lamego,,C.Dalvi.A Numerical-Based Fuzzy PIDController Applied To ADCDrive[J].IEEE.
[4] C.M.Lim.Implementation and experimentalstudy ofafuzzy logic controller for DCmotors Computers in Industry[J].1995(26):93-96.
[5] 尤 強(qiáng),,等.基于模糊PID控制的步進(jìn)電機(jī)驅(qū)動(dòng)控制器[J].計(jì)量技術(shù),2001(5).
[6] 郭云林,,等.兼?zhèn)淠:刂婆cPID調(diào)節(jié)的單片機(jī)液位控制系統(tǒng)[J].電子技術(shù)應(yīng)用,,1997(11).
[7] 葉云岳,等.直線電機(jī)的PID控制與模糊控制[J].電工技術(shù)學(xué)報(bào),,第16卷第3期.
[8] 劉金凌,,等.直線電機(jī)伺服系統(tǒng)的模糊推理自校正PID控制[J].清華大學(xué)學(xué)報(bào),1998(38).
[9] 模糊PID控制器用于直流電機(jī)的控制[J].哈爾濱理工大學(xué)學(xué)報(bào),,1997,,10(2).
