
一、引言
衛(wèi)星測控多波束系統(tǒng)主要針對衛(wèi)星信號實施測控,它包括兩個方面:信號波達方向(DOA)的估計和數(shù)字波束合成。
波達方向的估計是對空間信號的方向分布進行超分辨估計,提取空間源信號的參數(shù)如方位角、仰角等。
數(shù)字波束合成也稱為空域濾波,主要是根據(jù)信號環(huán)境的變化自適應地改變各陣元的加權因子,在期望信號方向形成主波束,在干擾信號方向形成零陷,降低副瓣電平, 目的是在增強期望信號的同時最大程度的抑制無用的干擾和噪聲,并提取有用的信號特征以及信號所包含的信息。用于測向和波束合成的算法很多,選擇合適的算法來滿足系統(tǒng)的需求是一個重要方面。另一方面,該系統(tǒng)對實時性有一定的要求,要求在限定時間內完成測向和波束合成權值的計算。
本文所介紹的衛(wèi)星測控多波束系統(tǒng)采用ADI公司新近推出的新一代TigerSHARC DSP芯片和FPGA器件相結合組成信號處理模塊,利用DSP的軟件編程完成測向和波束合成權值的計算,然后用FPGA器件將原始信號和權值進行波束合成,在系統(tǒng)設計中我們使用兩片igerSHARCDSP 芯片來完成。高性能的DSP芯片保證了數(shù)據(jù)能夠準確及時的處理,也構成了該系統(tǒng)的重要組成部分。
二、TigerSHARC DSP芯片介紹
TigerSHARC101S 是AD公司新近推出的高性能定/浮點DSP,具有極高的處理能力,它采用靜態(tài)超標量結構,既有超標量處理器所具有的大容量指令緩沖池和指令跳轉功能,又可以在程序執(zhí)行前就把指令級并行操作用編譯器預測出來,其主要的性能指標為:
(1)主頻為250 MHz,即單指令周期為4 ns;有2個對等的處理單元來支持SIMD(單指令多數(shù)據(jù))模式;
(2)系統(tǒng)內部有3條獨立的128位數(shù)據(jù)總線,分別訪問各自的2 Mbit存儲空間;
(3)系統(tǒng)外部數(shù)據(jù)總線為64 bit,地址總線32 bit,外部尋址空間為4G字;
(4)4個8 bit的全雙工鏈路口,各自可以獨立工作。在多處理器系統(tǒng)中,鏈路口可作為處理器之間的點到點通信,組成分布式的多處理器系統(tǒng)。14個DMA通道,可用于后臺傳輸;
(5)可擴展性強,共享并行總線可支持8個TS101S連在一起用于高速的數(shù)字信號處理。
由于測向和波束合成的算法計算量大,系統(tǒng)對信號的處理時間有要求,一片DSP不能完成任務,本系統(tǒng)充分利用TS101S DSP芯片的并行處理能力,采用多處理器的并行結構來完成信號的處理。
三、算法研究
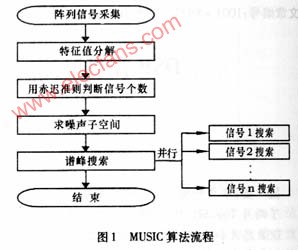
用于測向和波束合成的算法很多,各種算法各有優(yōu)勢,通過對這些算法的模擬和性能比較,最終選擇MUSIC(Multiple Signal Characteristic)算法來實現(xiàn)測向,用基于線性約束最小二乘恒模算法進行波束合成。MUSIC算法的基本原理是根據(jù)天線陣中不同位置的陣元所接收到的空間來波信號的樣本數(shù)據(jù)、天線位置參數(shù)和陣元的特性參數(shù),應用現(xiàn)代譜估計理論和統(tǒng)計學理論及相應的數(shù)學運算,對來波的空間譜進行估計,并分析其能量的分布狀態(tài),以確定空間來波的方向,也就是從背景噪聲中檢測出空間源信號并估計出信號的參數(shù)如方位角、仰角等,這種測向技術具有在較強干擾環(huán)境下同時對同信道內多個信號的快速、高靈敏度、高精度測向的功能。算法實現(xiàn)流程圖1所示。
基于線性約束的最小二乘恒模算法是最小二乘算法的一種改進,它克服了最小二乘算法存在的干擾捕獲問題,利用線性約束的方法對初始權向量進行優(yōu)化,使之在迭代過程中可以較快而準確地收斂于我們所期望的信號,并且不受信號功率大小的影響。該算法收斂速度快,輸出信號的信干噪比可以接近理想值,并且對幅相差不敏感,通過對陣列信號進行算法仿真,最小二乘恒模算法性能可以達到系統(tǒng)需求。算法的流程如圖2所示。

四、DSP模塊設計
1.DSP模塊功能
系統(tǒng)使用一個C尺寸VXI標準機箱,插槽包括0槽、DSP模塊和波束合成模塊。DSP模塊負責測向和波束合成權值的計算,波束合成模塊將原始數(shù)據(jù)和權值進行波束合成,模塊之間的數(shù)據(jù)交換使用LBUS。控制終端(微機)通過VXI總線給DSP模塊發(fā)送命令,DSP模塊以外部中斷2的方式響應接收命令并實現(xiàn)控制中斷的對系統(tǒng)的控制,命令格式由內部協(xié)議規(guī)定。
根據(jù)系統(tǒng)需求,DSP模塊要完成以下6個功能:
(1) 接收原始數(shù)據(jù)和合成結果
數(shù)據(jù)采集部分是由波束合成模塊完成的,DSP模塊定時器每500 ms接收一次原始數(shù)據(jù)和結果數(shù)據(jù),并在500 ms內完成測向和波束合成權值的計算。數(shù)據(jù)交換按照兩個模塊制定的內部協(xié)議來執(zhí)行。
(2)自動跟蹤
系統(tǒng)初始或一般狀態(tài)為自動跟蹤狀態(tài),來波的初始方位區(qū)域已給定,DSP模塊每500 ms測向一次從而保證了系統(tǒng)能夠緊跟信號來向。
(3)多次測向
考慮到實際信號中存在的干擾和誤差,取多次測向中的平均值來作為實測方向。
(4)指定來波方向
指定來波方向后直接計算波束合成的權值,此時不利用接收的原始信號而是自己產(chǎn)生信號來進行波束合成權值的計算。
(5)顯示通道波形或幅相差
DSP板將幅相差的數(shù)據(jù)回傳給控制終端后并在終端計算機上顯示。
(6)顯示合成結果
DSP模塊將波束合成的權值傳輸給波束合成模塊,波束合成模塊將權值和原始數(shù)據(jù)合成后回傳過來并在控制終端上顯示。
DSP模塊程序框圖如圖3所示。

2.DSP模塊結構
接收衛(wèi)星信號的陣列天線為6×6的面陣,多通道接收機完成信號的采樣,再經(jīng)過數(shù)字下變頻,送到處理單元的是36個通道的I、Q兩路共72路數(shù)據(jù)。由于陣列信號的數(shù)據(jù)量大,算法也比較復雜,我們需要使用2片TS101S芯片并行處理來實現(xiàn)。
并行系統(tǒng)的互連結構包括2種方式:共享存儲器結構和分布式結構。共享存儲器結構的連接方式是將所有的處理器都連到一個通道上,該通道一般是一種背板總線(如VXI總線),它既可以作為處理器間的通信媒介也可以作為處理器和共享存儲器間的數(shù)據(jù)通信。這種結構數(shù)據(jù)傳輸?shù)膸掃h遠大于直接連接的通信端口,但是存在著總線競爭問題,隨著處理器數(shù)目的增加,處理器平均的總線帶寬會降低,影響數(shù)據(jù)吞吐量。分布式結構處理器之間通過鏈路口進行直接的數(shù)據(jù)傳輸,鏈路口在處理器之間提供了高寬帶的點對點通信。這種連接完全為了處理器之間的通信,但是在數(shù)據(jù)傳輸時會占用其他DSP芯片的內部資源。
TigerSHARC DSP芯片硬件上可以同時支持這兩種并行體系結構,前者通過共享外部地址數(shù)據(jù)控制總線方式實現(xiàn),后者通過DSP間的專用的鏈路口點對點的互連實現(xiàn)。本文所設計的DSP模塊結構從通信網(wǎng)絡的連接關系來看,既是共享總線系統(tǒng),又是分布式系統(tǒng),兩片DSP芯片的外部地址總線、數(shù)據(jù)總線、控制總線直接相連,并且一起通過總線接口連接到VXI總線上,實現(xiàn)和其他模塊的數(shù)據(jù)通信。由于每片DSP內部有6 Mbit的雙口RAM,因此不需要外部數(shù)據(jù)存儲器。DSP A和DSP B的鏈路口也直接相連,兩片DSP可以通過鏈路口交換數(shù)據(jù)。DSP模塊程序采用EPROM方式引導,兩片DSP共用一片548K×8bit的FLASH DSM2150作為程序存儲器。DSP模塊框圖如圖4所示。

整個DSP模塊的處理時間分為3個時間段,分別為從緩沖中讀取數(shù)據(jù)時間、測向時間和波束合成權值計算時間,其中主要的開銷是測向的時間。為了使DSP模塊具備更高的效率,必須根據(jù)該模塊的結構和Tiger DSP芯片的性能合理分配任務。由于主要的開銷是測向算法,所以解決好測向的并行算法是尤其重要的。在MUSIC算法中,判斷出信號個數(shù)后要分別對各個信號區(qū)域進行峰值搜索,最后鎖定信號來向,系統(tǒng)最多可測4個不同來向的信號,因此將峰值搜索的區(qū)域劃分后交給兩片DSP同時進行搜索,可以節(jié)約大量的時間。測向和波束合成權值的計算不能同時進行,DSP A通知 DSP B進行波束合成后又可以返回去從緩存區(qū)中讀取數(shù)據(jù),此時DSP B計算波束合成的權值,這樣又大大提高了并行度。控制終端對DSP模塊的命令是通過外部中斷讀入,在執(zhí)行控制終端的命令時將定時器時鐘關閉。
DSP模塊的程序框架用C語言來構建,在C中插入?yún)R編來提高運算效率,并充分利用TigerDSP芯片雙處理器核的SIMD結構,為了更好地對整個的程序進行優(yōu)化,使用開發(fā)軟件中的工具Linear profiling 分析各個子函數(shù)所占用的時間比例,從而優(yōu)化程序的瓶頸。并行的系統(tǒng)設計和一些優(yōu)化措施使DSP模塊的運行時間能夠滿足系統(tǒng)設計的需求。
3.DSP模塊設計的特點
在衛(wèi)星測控多波束系統(tǒng)DSP模塊的設計中我們考慮了多方面的因素,可以歸納為以下幾個特點:
首先,高性能TigerSHARC DSP并行結構保證了系統(tǒng)的性能,系統(tǒng)要求在500 ms內完成最多4個來波方向的測定和波束合成,使用兩片Tiger SHARC DSP并行工作,在300 ms內就可以完成,使得系統(tǒng)有充裕的時間去響應控制終端的命令。
其次,性能優(yōu)越的測向和波束合成算法保證了系統(tǒng)的穩(wěn)定工作,測向的精度保證在0.5°范圍內,信號經(jīng)過波束合成后,將噪聲信號加以抑制,信噪比有了很大的提高。并且在雙DSP處理器中并行分配任務,提高了程序運行效率。
第三,DSP模塊和波束合成模塊之間以及和外部控制終端之間完備的通信協(xié)議保證了數(shù)據(jù)和命令能構準確的傳輸。這種通信協(xié)議是根據(jù)實際需要自定義的,并且具有一定的容錯功能,保證了各個模塊之間接口的正常運行。
最后,系統(tǒng)控制流程設計合理,我們使用了DSP的外部中斷1、2、定時器中斷,以及兩片DSP之間通信的矢量中斷來實現(xiàn)對系統(tǒng)的控制,為了使高速運行的DSP能夠有效的與其他模塊、外部控制終端進行通信,程序流程的設計經(jīng)過了仔細的推敲,為DSP的穩(wěn)定工作提供保障。
五、結束語
本文討論了衛(wèi)星測控多波束系統(tǒng)DSP模塊中算法的并行實現(xiàn)以及并行處理任務的分配,采取了一系列措施優(yōu)化DSP模塊的整體程序,并應用了模塊化的思想,結構設計合理,能夠滿足系統(tǒng)的需求。