
1 引言
機(jī)器人" title="機(jī)器人">機(jī)器人聽覺系統(tǒng)主要是對(duì)人的聲音進(jìn)行語(yǔ)音識(shí)別" title="語(yǔ)音識(shí)別">語(yǔ)音識(shí)別并做出判斷,然后輸出相應(yīng)的動(dòng)作指令控制頭部和手臂的動(dòng)作,,傳統(tǒng)的機(jī)器人聽覺系統(tǒng)一般是以PC機(jī)為平臺(tái)對(duì)機(jī)器人進(jìn)行控制,,其特點(diǎn)是用一臺(tái)計(jì)算機(jī)作為機(jī)器人的信息處理核心通過接口電路對(duì)機(jī)器人進(jìn)行控制,,雖然處理能力比較強(qiáng)大,,語(yǔ)音庫(kù)比較完備,系統(tǒng)更新以及功能拓展比較容易,,但是比較笨重,,不利于機(jī)器人的小型化和復(fù)雜條件下進(jìn)行工作,此外功耗大,、成本高,。
本次設(shè)計(jì)采用了性價(jià)比較高的數(shù)字信號(hào)處理芯片TMS320VC5509" title="TMS320VC5509">TMS320VC5509作為語(yǔ)音識(shí)別處理器,具有較快的處理速度,,使機(jī)器人在脫機(jī)狀態(tài)下,,獨(dú)立完成復(fù)雜的語(yǔ)音信號(hào)處理和動(dòng)作指令控制,FPGA系統(tǒng)的開發(fā)降低了時(shí)序控制電路和邏輯電路在PCB板所占的面積,,使機(jī)器人的"大腦"的語(yǔ)音處理部分微型化,、低功耗。一個(gè)體積小,、低功耗,、高速度能完成特定范圍語(yǔ)音識(shí)別和動(dòng)作指令的機(jī)器人系統(tǒng)的研制具有很大的實(shí)際意義。
2 系統(tǒng)硬件總體設(shè)計(jì)
系統(tǒng)的硬件功能是實(shí)現(xiàn)語(yǔ)音指令的采集和步進(jìn)電機(jī)的驅(qū)動(dòng)控制,,為系統(tǒng)軟件提供開發(fā)和調(diào)試平臺(tái),。如圖1所示。
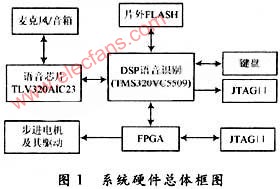
系統(tǒng)硬件分為語(yǔ)音信號(hào)的采集和播放,,基于DSP的語(yǔ)音識(shí)別,F(xiàn)PGA動(dòng)作指令控制,、步進(jìn)電機(jī)及其驅(qū)動(dòng),、DSP外接閃存芯片,JTAG口仿真調(diào)試和鍵盤控制幾個(gè)部分,。工作流程是麥克風(fēng)將人的語(yǔ)音信號(hào)轉(zhuǎn)化為模擬信號(hào),,在經(jīng)過音頻芯片TLV320AIC23量化轉(zhuǎn)化成數(shù)字信號(hào)輸入DSP.DSP完成識(shí)別后,,輸出動(dòng)作指令。
FPGA根據(jù)DSP輸入的動(dòng)作指令產(chǎn)生正確的正反轉(zhuǎn)信號(hào)和準(zhǔn)確的脈沖給步進(jìn)電機(jī)驅(qū)動(dòng)芯片,,驅(qū)動(dòng)芯片提供步進(jìn)電機(jī)的驅(qū)動(dòng)信號(hào),,控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)。片外 FLASH用于存儲(chǔ)系統(tǒng)程序和語(yǔ)音庫(kù)并完成系統(tǒng)的上電加載,。JTAG口用于與PC機(jī)進(jìn)行聯(lián)機(jī)在線仿真,,鍵盤則用于參數(shù)調(diào)整和功能的切換。
3 語(yǔ)音識(shí)別系統(tǒng)設(shè)計(jì)
3.1 語(yǔ)音信號(hào)的特點(diǎn)
語(yǔ)音信號(hào)的頻率成分主要分布在300~3400Hz之間,,根據(jù)采樣定理選擇信號(hào)的采樣率為8 kHz,。語(yǔ)音信號(hào)的一個(gè)特點(diǎn)在于他的"短時(shí)性",有時(shí)在一個(gè)短時(shí)段呈現(xiàn)隨機(jī)噪聲的特性,,而另一段表現(xiàn)周期信號(hào)的特性,,或二者兼而有之,。語(yǔ)音信號(hào)的特征是隨時(shí)間變化的,,只有一段時(shí)間內(nèi),信號(hào)才表現(xiàn)穩(wěn)定一致的特征,,一般來(lái)說短時(shí)段可取5~50 ms,,因此語(yǔ)音信號(hào)的處理要建立在其"短時(shí)性"上[2],,系統(tǒng)將語(yǔ)音信號(hào)幀長(zhǎng)設(shè)為20 ms,幀移設(shè)為10 ms,,則每幀數(shù)據(jù)為160×16 b,。
3.2 語(yǔ)音信號(hào)的采集和播放
語(yǔ)音采集和播放芯片采用的是TI公司生產(chǎn)的TLV320AIC23B" title="TLV320AIC23B">TLV320AIC23B,TLV320AIC23B的模數(shù)轉(zhuǎn)換(ADC)和數(shù)模轉(zhuǎn)換(DAC)部件高度集成在芯片內(nèi)部,,芯片采用8 k采樣率,,單聲道模擬信號(hào)輸入,雙聲道輸出,。TLV320AIC23具有可編程特性,,DSP可通過控制接口來(lái)編輯該器件的控制寄存器,而且能夠編譯 SPI,,I2C兩種規(guī)格的接口,,TLV320AIC23B與DSP5509的電路連接如圖2所示。
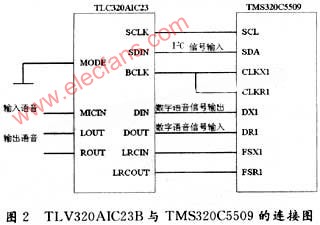
DSP采用I2C口對(duì)TLV320AIC23的寄存器進(jìn)行設(shè)置,。當(dāng)MODE=O時(shí),,為I2C規(guī)格的接口,DSP采用主發(fā)送模式,,通過I2C口對(duì)地址為 0000000~0001111的11個(gè)寄存器進(jìn)行初始化,。I2C模式下,數(shù)據(jù)是分為3個(gè)8 b寫入的。而TLV320AIC23有7位地址和9位數(shù)據(jù),,也就是說,,需要把數(shù)據(jù)項(xiàng)上面的最高位補(bǔ)充到第二個(gè)8 B中的最后一位。
MCBSP串口通過6個(gè)引腳CLKX,,CLKR,,F(xiàn)SX,F(xiàn)SR,,DR和CX與TLV320AIC23相連,。數(shù)據(jù)經(jīng)MCBSP串口與外設(shè)的通信通過DR和 DX引腳傳輸,控制同步信號(hào)則由CLKX,,CLKR,,F(xiàn)SX,F(xiàn)SR四個(gè)引腳實(shí)現(xiàn),。將MCBSP串口設(shè)置為DSP Mode模式,,然后使串口的接收器和發(fā)送器同步,并且由TLV320AIC23的幀同步信號(hào)LRCIN,,LRCOUT啟動(dòng)串口傳輸,,同時(shí)將發(fā)送接收的數(shù)據(jù)字長(zhǎng)設(shè)定為32 b(左聲道16 b,右聲道16 b)單幀模式,。
3.3 語(yǔ)音識(shí)別程序模塊的設(shè)計(jì)
為了實(shí)現(xiàn)機(jī)器人對(duì)非特定人語(yǔ)音指令的識(shí)別,,系統(tǒng)采用非特定人的孤立詞識(shí)別系統(tǒng)。非特定人的語(yǔ)音識(shí)別是指語(yǔ)音模型由不同年齡,、不同性別,、不同口音的人進(jìn)行訓(xùn)練,在識(shí)別時(shí)不需要訓(xùn)練就可以識(shí)別說話人的語(yǔ)音[2],。系統(tǒng)分為預(yù)加重和加窗,,短點(diǎn)檢測(cè),特征提取,,與語(yǔ)音庫(kù)的模式匹配和訓(xùn)練幾個(gè)部分,。
3.3.1 語(yǔ)音信號(hào)的預(yù)加重和加窗
預(yù)加重處理主要是去除聲門激勵(lì)和口鼻輻射的影響,預(yù)加重?cái)?shù)字濾波H(Z)=1一KZ-1,,其中是為預(yù)加重系數(shù),,接近1,本系統(tǒng)中k取0.95,。對(duì)語(yǔ)音序列X(n)進(jìn)行預(yù)加重,,得到預(yù)加重后的語(yǔ)音序列x(n):x(n)=X(n)一kX(n一1) (1)
系統(tǒng)采用一個(gè)有限長(zhǎng)度的漢明窗在語(yǔ)音序列上進(jìn)行滑動(dòng),用以截取幀長(zhǎng)為20 ms,,幀移設(shè)為10 ms的語(yǔ)音信號(hào),,采用漢明窗可以有效減少信號(hào)特征的丟失,。
3.3.2 端點(diǎn)檢測(cè)
端點(diǎn)檢測(cè)在詞與詞之間有足夠時(shí)間間隙的情況下檢測(cè)出詞的首末點(diǎn),,一般采用檢測(cè)短時(shí)能量分布,,方程為:
![]()
其中,x(n)為漢明窗截取語(yǔ)音序列,,序列長(zhǎng)度為160,,所以N取160,為對(duì)于無(wú)音信號(hào)E(n)很小,,而對(duì)于有音信號(hào)E(n)會(huì)迅速增大為某一數(shù)值,,由此可以區(qū)分詞的起始點(diǎn)和結(jié)束點(diǎn)。
3.3.3特征向量提取
特征向量是提取語(yǔ)音信號(hào)中的有效信息,,用于進(jìn)一步的分析處理,。目前常用的特征參數(shù)包括線性預(yù)測(cè)倒譜系數(shù)LPCC、美爾倒譜系數(shù)MFCC等,。語(yǔ)音信號(hào)特征向量采用Mel頻率倒譜系數(shù)MFCC(Mel Frequency Cepstrum Coeficient的提取,,MFCC參數(shù)是基于人的聽覺特性的,他利用人聽覺的臨界帶效應(yīng),,采用MEL倒譜分析技術(shù)對(duì)語(yǔ)音信號(hào)處理得到MEL倒譜系數(shù)矢量序列,,用MEL倒譜系數(shù)表示輸入語(yǔ)音的頻譜。在語(yǔ)音頻譜范圍內(nèi)設(shè)置若干個(gè)具有三角形或正弦形濾波特性的帶通濾波器,,然后將語(yǔ)音能量譜通過該濾波器組,,求各個(gè)濾波器輸出,對(duì)其取對(duì)數(shù),,并做離散余弦變換(DCT),,即可得到MFCC系數(shù)。MFCC系數(shù)的變換式可簡(jiǎn)化為:

其中,,i為三角濾波器的個(gè)數(shù),,本系統(tǒng)選P為16,F(xiàn)(k)為各個(gè)濾波器的輸出數(shù)據(jù),,M為數(shù)據(jù)長(zhǎng)度,。
3.3.4 語(yǔ)音信號(hào)的模式匹配和訓(xùn)練
模型訓(xùn)練即將特征向量進(jìn)行訓(xùn)練建立模板,模式匹配即將當(dāng)前特征向量與語(yǔ)音庫(kù)中的模板進(jìn)行匹配得出結(jié)果,。語(yǔ)音庫(kù)的模式匹配和訓(xùn)練采用隱馬爾可夫模型HMM (Hidden Markov Models),,他是一種統(tǒng)計(jì)隨機(jī)過程統(tǒng)計(jì)特性的概率模型一個(gè)雙重隨機(jī)過程,因?yàn)殡[馬爾可夫模型能夠很好地描述語(yǔ)音信號(hào)的非平穩(wěn)性和可變性,,因此得到廣泛的使用,。
HMM的基本算法有3種:Viterbi算法,前向一后向算法,,Baum-Welch算法,。本次設(shè)計(jì)使用Viterbi算法進(jìn)行狀態(tài)判別,將采集語(yǔ)音的特征向量與語(yǔ)音庫(kù)的模型進(jìn)行模式匹配。Baum-Welch算法用來(lái)解決語(yǔ)音信號(hào)的訓(xùn)練,,由于模型的觀測(cè)特征是幀間獨(dú)立的,,從而可以使用Baum- Welch算法進(jìn)行HMM模型的訓(xùn)練。
3.4 語(yǔ)音識(shí)別程序的DSP開發(fā)
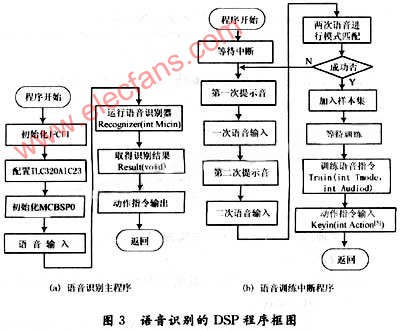
DSP的開發(fā)環(huán)境為CCS3.1及,。DSP/BIOS,,將語(yǔ)音識(shí)別和訓(xùn)練程序分別做成模塊,定義為不同的函數(shù),,在程序中調(diào)用,。定義語(yǔ)音識(shí)別器函數(shù)為int Recognizer(int Micin),識(shí)別結(jié)果輸出函數(shù)為int Result(void),,語(yǔ)音訓(xùn)練器函數(shù)為int Train(int Tmode,,int Audiod),動(dòng)作指令輸入函數(shù)為int Keyin(int Action),。
語(yǔ)音識(shí)別器的作用是將當(dāng)前語(yǔ)音輸入變換成語(yǔ)音特征向量,,并對(duì)語(yǔ)音庫(kù)的模板進(jìn)行匹配并輸出結(jié)果,語(yǔ)音應(yīng)答輸出函數(shù)將獲取的語(yǔ)音識(shí)別結(jié)果對(duì)應(yīng)的語(yǔ)音應(yīng)答輸出,,語(yǔ)音訓(xùn)練是將多個(gè)不同年齡,、不同性別、不同口音的人語(yǔ)音指令輸入轉(zhuǎn)化為訓(xùn)練庫(kù)的模板,。為防止樣本錯(cuò)誤,,每個(gè)人的語(yǔ)音指令需要訓(xùn)練2次,對(duì)于2次輸入用用歐氏距離去進(jìn)行模式匹配,,若2次輸入相似度達(dá)到95%,,則加入樣本集。語(yǔ)音應(yīng)答輸入函數(shù)是為每個(gè)語(yǔ)音庫(kù)中模板輸入對(duì)立的語(yǔ)音輸出,,以達(dá)到語(yǔ)言應(yīng)答目的,。系統(tǒng)工作狀態(tài)為執(zhí)行語(yǔ)言識(shí)別子程序,訓(xùn)練時(shí)執(zhí)行外部中斷,,執(zhí)行訓(xùn)練函數(shù),,取得數(shù)據(jù)庫(kù)模板,訓(xùn)練完畢返回,。程序框圖如圖3所示,。
4 機(jī)器人的動(dòng)作控制系統(tǒng)設(shè)計(jì)
4.1 FPGA邏輯設(shè)計(jì)
系統(tǒng)通過語(yǔ)音控制機(jī)器人頭部動(dòng)作,頭部運(yùn)動(dòng)分為上下和左右運(yùn)動(dòng)2個(gè)自由度,,需要2個(gè)步進(jìn)電機(jī)控制,,DSF完成語(yǔ)音識(shí)別以后,輸出相應(yīng)的動(dòng)作指令,,動(dòng)作執(zhí)行結(jié)束后,,DSP發(fā)出歸零指令,,頭部回到初試狀態(tài)。FPGA的作用是提供DSP接口邏輯,,設(shè)置存儲(chǔ)DSP指令的RAM塊,,同時(shí)產(chǎn)生步進(jìn)電機(jī)驅(qū)動(dòng)脈沖控制步進(jìn)電機(jī)轉(zhuǎn)動(dòng)方向和角度。
FPGA器件為動(dòng)作指令控制單元,,設(shè)計(jì)采用FLEXlOKE芯片,,接收DSP數(shù)據(jù)后并行控制2路步進(jìn)電機(jī)。FPGA內(nèi)部結(jié)構(gòu)邏輯如圖4所示,,F(xiàn)PGA內(nèi)部設(shè)置2個(gè)元件為電機(jī)脈沖發(fā)生器,控制電機(jī)的工作脈沖以及正反轉(zhuǎn),。AO~A7為DSP數(shù)據(jù)輸入端口,,WR為數(shù)據(jù)寫端口,P1,,P2為2個(gè)步進(jìn)電機(jī)驅(qū)動(dòng)芯片脈沖輸入口,,L1,L2為電機(jī)正反轉(zhuǎn)控制口,,ENABLE為使能信號(hào),。
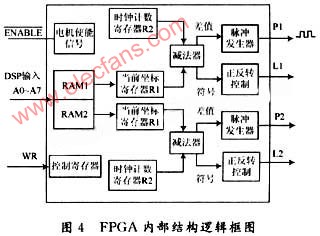
RAM1和RAM2分別為2個(gè)步進(jìn)電機(jī)的指令寄存器,電機(jī)脈沖發(fā)生器發(fā)出與RAM中相應(yīng)數(shù)量的方波脈沖,。DSP通過DO~D8數(shù)據(jù)端輸出8位指令,,其中。 D8為RAM選擇,,為1時(shí)選擇RAM1,,為0時(shí)選擇RAM0,DO~D7為輸出電機(jī)角度,,電極上下和左右旋轉(zhuǎn)角度為120°,,精度為1°,初始值都為 60°,,DO~D7的范圍為00000000~11111000,,初始值為00111100。FPGA作為步進(jìn)脈沖發(fā)生器,,通過時(shí)鐘周期配置控制電機(jī)轉(zhuǎn)速,,與初始值對(duì)應(yīng)坐標(biāo)決定正反轉(zhuǎn)。系統(tǒng)動(dòng)作指令程序如圖5所示,。
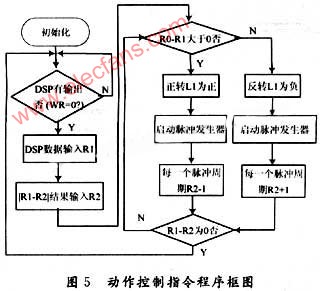
其中R1為DSP指令寄存器,,R2為當(dāng)前坐標(biāo)寄存器,通過DSP的輸出坐標(biāo)與FPGA的當(dāng)前坐標(biāo)進(jìn)行差值運(yùn)算來(lái)確定步進(jìn)電機(jī)的旋轉(zhuǎn)方向和旋轉(zhuǎn)角度,,優(yōu)點(diǎn)是可以根據(jù)新的輸入指令的變化,,結(jié)束當(dāng)前動(dòng)作以運(yùn)行新的指令,,指令執(zhí)行完畢后,系統(tǒng)清零,,步進(jìn)電機(jī)回到初始狀態(tài),。
4.2 FPGA邏輯仿真
FPGA以MAX-PLUSⅡ開發(fā)平臺(tái),用語(yǔ)言為VHDL語(yǔ)言對(duì)上述邏輯功能進(jìn)行設(shè)計(jì),,并通過JTAG接口進(jìn)行了調(diào)試,,F(xiàn)LEXl0KE芯片能夠根據(jù)DSP輸出指令輸出正確的正反轉(zhuǎn)信號(hào)和脈沖波形。
4.3 步進(jìn)電機(jī)驅(qū)動(dòng)設(shè)計(jì)
FPGA通過P1,,L1,,P2,L2輸出控制控制步進(jìn)電機(jī)驅(qū)動(dòng)芯片,。步進(jìn)電機(jī)驅(qū)動(dòng)采用的是東芝公司生產(chǎn)的單片正弦細(xì)分二相步進(jìn)電機(jī)驅(qū)動(dòng)專用芯片TA8435H,,F(xiàn)PGA與TA8435H電路連接如圖6。
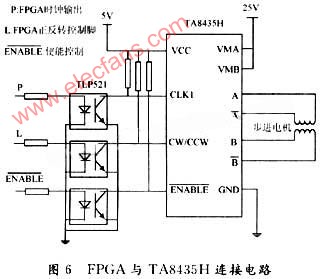
由于FLEX1OKE和TMS320VC5509工作電壓為3.3 V,,而TA8435H為5 V和25 V,,所以管腳連接使用光電耦合器件TLP521,使兩邊電壓隔離,。CLK1為時(shí)鐘輸入腳,,CW/CCW為正反轉(zhuǎn)控制腳,A,,A,,B,B為二相步進(jìn)電機(jī)輸入,。
5 結(jié) 語(yǔ)
系統(tǒng)充分利用了DSP的高處理速度和可擴(kuò)展的片外存儲(chǔ)空間,,具有高速、實(shí)時(shí),、識(shí)別率高的特點(diǎn)并支持大的語(yǔ)音庫(kù),,F(xiàn)PGA的使用使系統(tǒng)電路獲得簡(jiǎn)化,一片 FLEXl0KE芯片可以完成2個(gè)步進(jìn)電機(jī)的時(shí)序控制,。雖然在處理速度和語(yǔ)音庫(kù)的存儲(chǔ)容量上與PC機(jī)系統(tǒng)具有一定的差距,,但在機(jī)器人的微型化、低功耗和特定功能實(shí)現(xiàn)上,,以DSP和FPGA為核心的嵌入式系統(tǒng)無(wú)疑具有廣闊的前景,。